小型烟草植保机移动平台结构设计与试验
2019-04-29高观光李志强陈黎卿
刘 路 杨 路 高观光 李志强 郑 泉 陈黎卿
(1.安徽农业大学工学院, 合肥 230036; 2.安徽省智能农机装备工程实验室, 合肥 230036)
0 引言
垄作法因其水土保持特性而被大部分丘陵旱地所应用,然而其高垄畦沟的特性给田间管理机械的使用提出了很高的要求。皖南山区作为全国主要的烟草种植基地之一,烟草种植行距为1.2 m,垄沟底较窄,约为0.3 m,田头间距为0.8 m[1-2]。近年来,国内外相关学者针对烟草作业机械开展了大量的研究。陈晓红等[3]研制了烤烟覆膜机压膜装置的,其自动覆膜技术对提高烟苗成活率和降低虫害发生率具有显著效果。燕亚民等[4]研制了一种导苗管式烟草移栽机,其操作简单,提高了烟苗的移栽工作效率。张秀丽等[5]为了提高烟草大田中耕培土作业质量和效率,设计了复合切削式烟草中耕培土机。然而,对于烟草种植中后期烟叶遮叠环境下的植保作业要求,上述研究在田间管理上还具有一定局限性。
烟草中后期便于植保作业的移动平台是烟草植保作业的一个空缺[6-7]。传统的植保机械主要有高地隙植保机械[8-9]和无人机植保等类型,由于烟草种植多以地处丘陵山区等垄作田块为主,以高地隙植保机械为代表的大型机械难以田间作业,而无人机植保无法满足烟草中后期根部的植保需求,因此目前烟草的植保工作仍然以人工背负式打药机为主。烟草中后期叶片大,密度高,对劳动力需求大;另一方面,人工背负作业时易对烟草叶片造成损伤,同时农药对人体也有一定的伤害。
根据烟草垄作环境,本文设计一款三轮结构轮式移动平台。针对垄作环境田头转向要求,利用车身姿态稳定临界条件分析三轮移动平台系统最大转向角度;根据不同车速下移动平台在烟草垄沟环境下运动平稳性和动力分析,确定移动平台安全行驶速度。通过试验验证移动平台设计可靠性,以确保所设计的烟草植保移动平台的行驶性能满足垄作环境作业要求。
1 整机结构设计
1.1 整机结构
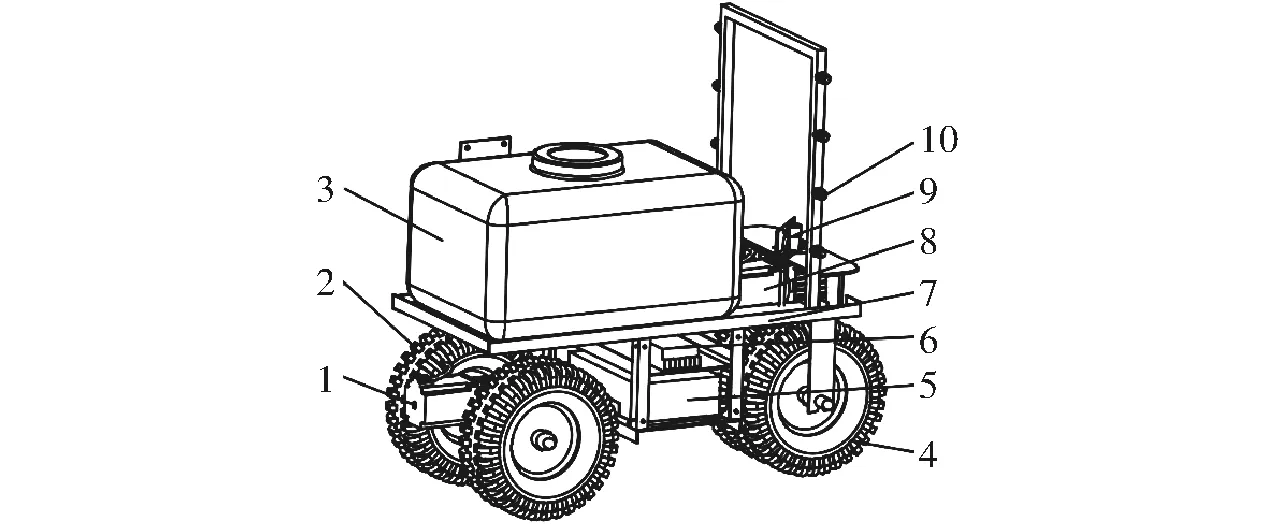
图1 烟草植保机移动平台整机结构图Fig.1 Structure diagram of tobacco plant protection robot 1.驱动电机 2.后轮 3.药箱 4.前轮 5.电池 6.驱动器 7.车身 8.转向电机 9.编码器 10.喷头
烟草植保移动平台主要由车身、传动系统、转向系统和喷药系统组成,结构如图1所示。其中车身由车架、龙门架等组成;传动系统由驱动电机、驱动减速器等组成;转向系统由转向电机、转向减速器、前轮转角传感器等组成。烟草植保机移动平台主要结构参数如表1所示。
1.2 工作原理
烟草植保机在田间作业时,作业人员根据田间情况遥控植保机械作业,其工作原理如图2所示。控制指令通过2.4 GHz频道将指令传输给SBUS接收器,根据SBUS协议将指令传达给STM32单片机,单片机通过解析指令,实现对机器人动力系统及喷雾系统的控制,驱动力和转向力由ZM-6615型直流无刷驱动器通过调节PWM方式进行控制。通过单片机IO接口为机器人提供行驶控制信号,可以实现机器人前进和后退功能的有效切换[10-13]。遥控功能为后续喷药等管理作业保留扩展接口。
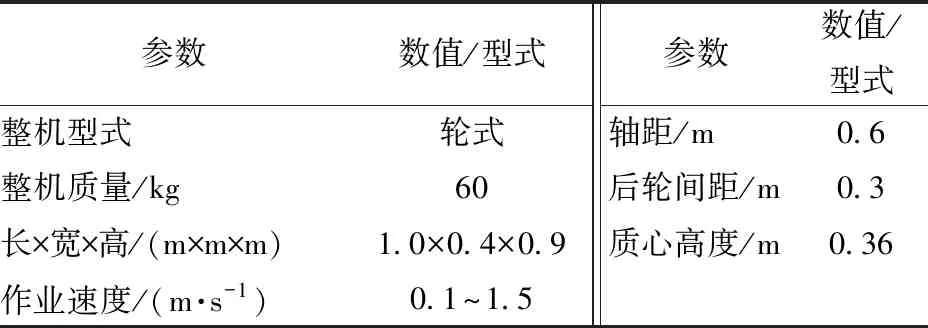
表1 烟草植保机移动平台主要结构参数Tab.1 Main structural parameters of tobacco plant protection mobile platform
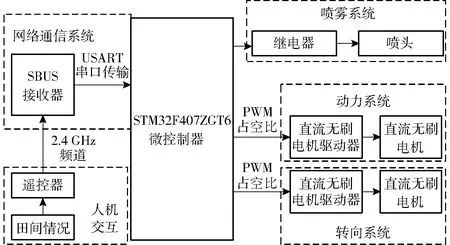
图2 工作原理示意图Fig.2 Working principle diagram
2 关键部件设计
2.1 传动系统设计
如图3所示,所设计的烟草植保移动系统采用后轮驱动。传动系统通过控制器驱动电机为后轴提供动力,其中控制器由STM32单片机和电机驱动器组成,驱动器接收单片机的PWM信号占空比调节电机的速度。

图3 传动布置示意图Fig.3 Schematic of transmission arrangement
移动平台在水平地面运动过程中所受到的行驶阻力主要包括来自地面的滚动阻力Ff和空气阻力Fw。在坡道上行驶、加速行驶时,除上述两种阻力外,还需要克服平台自身重力带来的阻力Fi以及为提供加速度产生的加速阻力Fj,因此植保移动平台在行驶过程中所受到的阻力为
∑F=Ff+Fw+Fi+Fj
(1)
考虑到烟草植保机在田间工作时速度较低的特点,可将速度设定为定值,忽略加速阻力对整机的影响,滚动阻力和由重力产生的阻力都与车身重力成正比,因此移动平台在行驶过程中所受到的阻力为
Fψ=Ff+Fi=G(f+i)
(2)
其中
i=tanα
(3)
式中Fψ——道路阻力,N
G——车身自身重力,N
f——滚动摩擦因数,取0.1[14]
i——道路坡度
α——道路坡道角
根据田头T型通道结构,烟草植保机移动平台在田头转弯时,车轮靠垄一侧会入侵至垄坡,垄坡底部坡道角α约为30°,由式(1)~(3)可知,此时移动平台的行驶阻力Fψ为408 N。
为确保移动平台正常行驶,在运动过程中车轮所需的驱动力Ft需大于其行驶阻力Fψ,设计安全系数1.5,即
Ft>1.5Fψ=612 N
电机驱动力计算式为
(4)
式中Ttq——驱动轮转矩,N·m
r——驱动轮半径,取150 mm
P——电机额定功率,kW
n——电机额定转速,r/min
i0——传动比
驱动系统结构如图4所示,经计算其驱动力大于安全行驶阻力612 N。选取额定功率750 W、额定转速为3 000 r/min的直流无刷电机,并配套1∶40的减速器。驱动力Ft为637 N,满足田间工作驱动的设计要求。

图4 驱动系统结构图Fig.4 Drive system structure diagram 1.驱动轮 2.驱动轴 3.直流无刷电机 4.减速器
2.2 转向系统设计
烟草植保机移动平台选用三轮模型[15-17],使整车在田头转向时,减小转向轮侵入田垄的距离,提高转向控制鲁棒性。同时,为了解决三轮车模型系统不稳定的缺点,前轮采用双轮机构,增大系统与地面的接触面积,使移动平台在转向时前轮侧偏角减小,其结构如图5所示。

图5 转向系统结构图Fig.5 Steering system structure diagram 1.转向轮 2.减速器 3.步进电机 4.编码器
选用步进电机作为转向电机,该步进电机为86系列两相大力矩混合式步进电机,单轴输出,步距角为1.8°,步距角精度为5%。电机与转向轴之间用1∶40减速器连接,增大转向驱动扭矩,避免步进电机低转速状态下丢步误差;另一端安装编码器,搭建转向闭环回路,以实现转向精准控制。
根据图6可得,植保移动平台转弯半径为

图6 转弯半径示意图Fig.6 Turning radius diagram

(5)
(6)
式中l——轴距长度θ——前轮转角
a——步距角γ——脉冲频率
根据移动平台结构,最内侧转弯半径R2与转角θ之间的关系为
(7)
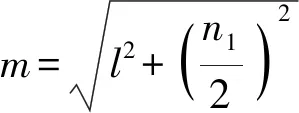
(8)
式中m——前轮与后内侧轮间距
n1——后轮间距
当烟草植保机移动平台最内侧转弯半径为0.8 m时,根据车身参数所需控制前轮转角θ为50°。
3 多体动力学性能分析
3.1 移动平台车身建模和仿真分析
利用RecurDyn/Track软件基于相对坐标系和相对递推算法的动态仿真建立烟草植保机移动平台车身的多体动力学模型[18-19],如图7所示。烟草植保机移动平台整体机械系统较为复杂,建模仿真仅需对平台行驶系统进行分析,本文将整机简化:①将工作部件简化为刚体,通过加载运动系统对机构进行仿真。②省略了不影响仿真的非工作部件,如螺栓、螺母等。③模型参数主要通过三维测量、计算或试验得到。其中,仿真模型刚体数为5,运动自由度为6,运动副数目为4。在多体动力学仿真软件RecurDyn中对烟草植保平台两后轮施加相同的驱动副,对其进行转弯半径的测量仿真试验。
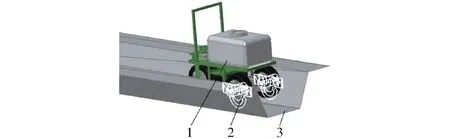
图7 烟草植保机移动平台仿真模型Fig.7 Simulation model of tobacco plant protection vehicle 1.车身 2.驱动副 3.垄沟
仿真结果如图8所示,烟草植保机移动平台在前轮转角为50°时转弯半径约为0.8 m,与理论计算结果相符。

图8 转弯半径仿真结果Fig.8 Simulation result of turning angles of different corners
3.2 机器人转向半径测试
如图9所示,测得烟草植保机移动平台最小转弯半径,保持平台前轮转角,低速自转一圈,获得转向内侧车轮和外侧车轮形成内外侧轨迹,再对轨迹进行实际测量。

图9 烟草植保机移动平台转向试验Fig.9 Turning test of tobacco plant protection robot
经测量,移动平台在前轮转角为50°时内轮的转弯半径为0.78 m,满足0.8 m的转向半径要求。
3.3 移动稳定性临界条件分析


图10 车身侧翻受力分析Fig.10 Force analysis diagram of car body rollover
3.4 垄间行走仿真分析
在田间行驶过程中,移动平台平稳性与路面平整度及车辆运行速度相关,为测试其不同速度驱动下垄间行驶的稳定性,分别记录以0.8、1.0、1.3 m/s在垄沟底部行驶的侧倾角,移动平台垄沟间行走最大侧倾角在-2°~3°之间,如图11可知,车身振动趋势和路面起伏状态相近,由于垄沟底部较为平坦,最大侧倾角和振幅随着车速变化较小,对车辆平稳性影响不大。
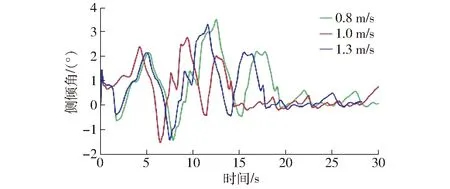
图11 不同速度下侧倾角曲线Fig.11 Rolling angular velocity curves at different speeds
移动平台田间行驶过程中,最大侧倾角多出现于田头转向位置。系统采集3块不同田块地面的参数(均包括田头转向区域),在不同垄作路面参数下,通过0.3~1.5 m/s以0.1 m/s递增的测试方法,完成移动平台垄间的行驶仿真,得到最大侧倾角和移动平台的移动平稳性,如图12所示。由图12可知,移动平台速度大于1.0 m/s后,侧倾角和侧倾角方差明显提升,行驶平稳性明显变差。

图12 烟草植保机器人仿真结果分析Fig.12 Simulation results analysis of tobacco plant protection robot
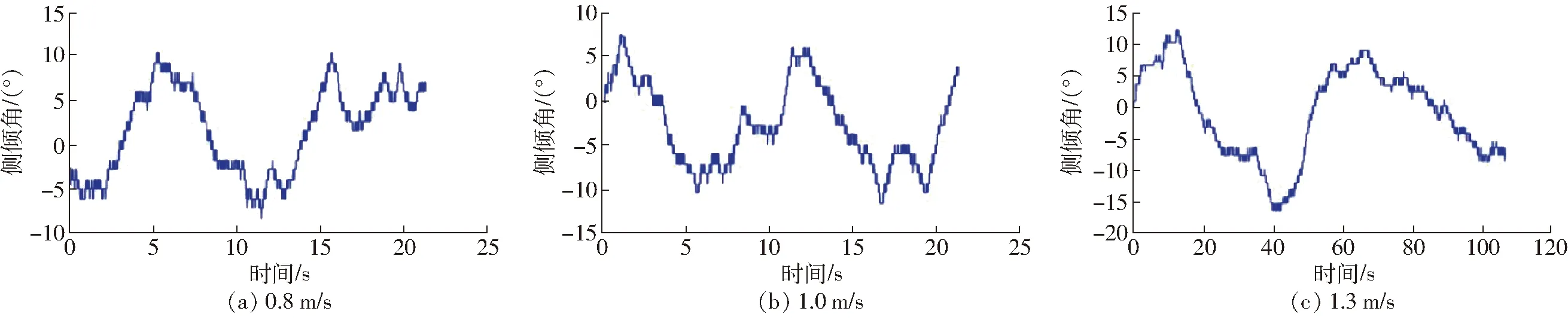
图14 车身侧倾角变化曲线Fig.14 Changing curves of car body roll angle
4 行驶稳定性试验
4.1 试验方法
试验于烟草种植中后期在安徽宣城烟草实验基地进行,如图13所示。试验主要包括直线行驶和田头转向试验,定速行驶试验通过陀螺仪测量不同速度下车身侧倾角,根据测量数据分析获取烟草植保平台在垄间的最佳工作速度;车身最大侧倾角试验是测量烟草植保机器人在田头转向时的侧倾角,以验证植保机器人在田头转向的稳定性[20-21]。

图13 田间试验Fig.13 Field test
4.2 田间试验
4.2.1田间匀速行驶试验
移动平台匀速(0.8、1.0、1.3 m/s)在烟草田间遥控行驶测试试验,利用陀螺仪记录平台在不同速度下行走的侧倾角,如图14所示。
由图14可知,在3次试验中,侧倾角在很小的范围内进行波动。当速度为0.8 m/s时,其最大侧倾角在10.3°;当车速为1.0 m/s时,试验最大侧倾角为11.7°;当车速为1.3 m/s时,试验最大侧倾角为16.3°,试验结果与仿真结果相似。根据效率优先原则,在稳定性状况相近时,速度快实际作业效率高,烟草植保机器人的最佳作业速度在1.0 m/s左右。
4.2.2最大侧倾角试验
对移动平台在烟草田头进行转向试验,设定最高移动作业速度1.0 m/s,经多次试验记录移动平台在烟草田头转向入侵垄沟时的侧倾角,测得的数据如表2所示。经过试验测量,植保平台在通过田头转向时车身最大侧倾角为14.38°,最大侧倾角远小于侧翻临界条件30°。在转向试验中车身均没有发生侧翻,因此,设计的烟草植保机移动平台在田头转向正常运动过程中不会发生侧翻,满足高垄畦沟环境下烟草植保移动平台运动需求。
经测试,平台在水平路面能够达到的最小转弯半径为0.8 m;当车身速度在1.0 m/s以内作业时,其最大侧倾角为14.38°,机器人在高垄畦沟实际作业过程中具有良好的转弯性能及运动稳定性。
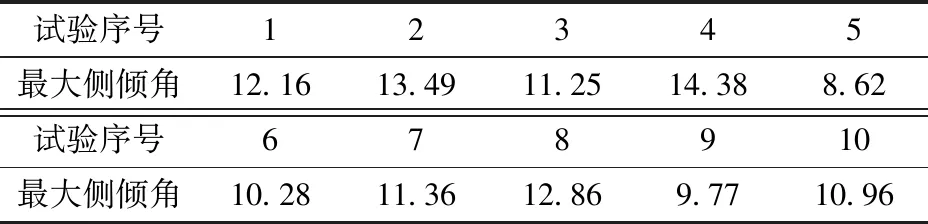
表2 田头转向最大侧倾角Tab.2 Maximum inclination angle of cornering (°)
5 结论
(1)针对烟草垄作环境,对传动和转向系统等关键部件进行设计,最小转弯半径为0.8 m,满足烟草田间直线行驶、田头转向等需求,能够以1.0 m/s速度行驶,达到预期的作业效果。
(2)利用RecurDyn/Track进行仿真分析,在前轮转角为50°时,转弯半径为800 mm,符合设计计算结果;在垄沟行走时其侧倾角在-2°~3°之间波动,变化幅度较小,稳定性较高。
(3)通过试验稳定性测试,分析烟草植保机移动平台田间行驶性能。试验结果表明,植保平台能够在烟草垄底行驶,稳定性良好,左右摆动幅度为3°,没有损坏烟草作物;当作业速度为1.0 m/s时,最大侧倾角为14.38°,没有超过其发生侧翻的临界角度,能够安全通过。
