基于倾斜测流的浮标海流计原型设计与实现
2019-04-28任久春
陈 卓,任久春,朱 谦
(复旦大学信息科学与工程学院,上海 200433)
0 引言
海流计是用于测量海流流速和流向的仪器。由于现阶段的主流观测设备功耗高、价格昂贵[1-2],近年来国外一些研究机构开始研制轻量级、低成本的倾斜式海流计(tilt current meter,TCM)。现有的倾斜式海流计产品均固定于海床进行测量。文献[3]~文献[4]采用浮力球与加速度计装置,根据加速度的变化得到倾斜角,再利用流速与倾角的变换公式得到流速值。文献[5]在两者基础上,采用加速度计、磁力计以及大容量存储器,支持长期观测,并使用试验定标方式得到倾斜角与流速的对应关系。目前,国内相关研究很少,而国外已研制出的倾斜式海流计仅适用于长期的海底流速流向观测,易受海草、浮游生物等干扰,需要专业的潜水人员进行安装,并且测量传感器单一、数据处理方式简单,无法适应海面风浪环境下的海流测量。因此,为了测量海面及浅海流速流向,本文以水上运动训练场地水文监测为背景,设计了一种新型倾斜式浮标海流计原型。该原型基于ARM Cortex-M3微处理器、惯性测量单元(inertial measurement unit,IMU)、磁力计以及数据存储器等核心器件,采用惯导系统运动理论[6]和姿态融合算法[7]实时计算仪器姿态,再利用流速精确可控的水池进行流速-倾角曲线的试验定标,验证了其流速流向观测的可行性。基于此原型研制的海流计可固定于海面浮标进行定点长时间连续监测记录,多传感器的融合有利于对抗海面风浪干扰,具有低成本、低功耗、易安装、轻量便携等特点。因此,该原型在简单化的水文测量,尤其是针对水上运动训练等特定场景的流速流向测量中具有独特优势。
1 设计原理与关键技术
针对流体力学中倾斜测流模型公式较为复杂、难以确定系数等问题。本文提出近似拟合公式,采用试验定标方法得到倾角与流速的对应关系,简化了模型参数确定过程。由于仪器固定于海面浮标进行监测,遭受海面风浪冲击时的快速运动状态会带来附加加速度干扰,单纯利用加速度计根据重力加速度分布测量倾斜角度的方法会造成测量值振荡失真。因此,本文使用三轴加速度计与三轴陀螺仪融合的方式来解算姿态倾角。利用陀螺仪高频特性与加速度计低频特性优势互补,以适应动态测量环境;采用滑动平均滤波进行处理,提高了角度测量的准确性。此外,本文在流向测量中加入椭圆校准与倾斜修正,一定程度上提高了磁力计方向角的精确度。
1.1 倾斜测流理论模型
根据流体力学模型[4],当测流模块在水流推动力Fd与自身重力Fg、浮力Fb的作用下倾斜角度θ时,Fd与水流流速v的关系为:
(1)
式中:ρ为流体的密度;Cd为拖拽系数;A为测流模块的有效横截面积。
模块所受竖直方向的合力Fv为:
Fv=(m-ρV)g
(2)
式中:m为模块的质量;V为模块的体积;g为重力加速度。
由于Fv与Fd是相互垂直的,因此倾斜角θ与流速v的关系可由式(4)得到:
(3)
(4)
其中:
(5)
由此可见,流速v与倾角θ成正比例的非线性关系。当流速趋向于无穷大时,倾角就趋向于90°。测流原理分析如图1所示。

图1 测流原理分析图
随着水流流速的变化,测流模块倾斜程度的不同会导致其有效横截面积发生变化,拖拽系数也会发生变化,且涡流会影响不同几何尺寸模型的测量结果。因此,直接利用式(4)计算流速过于复杂,难以确定各项参数。为了避免这些不确定因素对v-θ曲线的影响,本文采用试验定标的方法来确定测量曲线。设A0为模块的横截面积,则其有效横截面积为A0cosθ。而拖拽系数会随着流速的增大近似线性下降[8]。假设其他参数为常量,本文将曲线拟合公式近似为:
(6)
式中:c为拟合系数。
1.2 惯导系统运动理论与姿态融合算法
原型的姿态测量主要基于惯导系统运动理论与姿态融合算法。惯性导航系统依靠IMU惯性测量单元得到物体的姿态信息进行导航控制。IMU包含三轴加速度计和三轴陀螺仪两种惯性测量元件。在惯导系统中,物体的运动可以抽象为载体坐标系S相对于参考坐标系E的运动。设初始状态下物体所处的载体坐标系与参考坐标系重合,对于物体的某一给定姿态,可以由初始状态的坐标系经过三次顺序旋转得到。采用北东地坐标系,围绕X轴旋转φ角,即横滚角;围绕Y轴旋转φ角,即俯仰角;围绕Z轴旋转Ψ角,即航向角。这三个欧拉角[9]在惯性导航系统中可以用来确定物体的任意姿态,又称为姿态角。

1.3 方向角计算与磁力计校准
物体的绝对航向角一般根据磁力计测量的磁场结果来确定。地磁场矢量可以分解为水平分量xh、yh和垂直分量zh,水平分量的矢量和H总是指向磁北。若以正北为参考方向,X轴的朝向为仪器随水流推动的运动方向。为提高测量准确度,可以根据式(7)引入倾斜校正计算航向角[11]:
(7)
磁北方向的确定是通过磁力计感知地球磁场实现的。但是一般情况下,地球磁场十分微弱,容易受到环境中电子设备等各种因素的磁场干扰。因此,在使用磁力计输出的磁场参数之前,需要使用椭圆补偿法[12]进行校准。
2 原型设计与实现
本文所设计的仪器原型结构包含处理器、传感器、存储器以及其他外围设备。原型结构如图2所示。处理器选用意法半导体公司生产的STM32F103CB,其基于Cortex M3内核,工作频率最高达到72 MHz,具有低功耗睡眠模式与实时时钟功能。传感器采用应美盛公司生产的MPU9250九轴运动传感器,封装了三轴加速度计、三轴陀螺仪与三轴磁力计,支持睡眠模式,功耗低、精度高。其可编程的数字滤波器,能够对输出数据进行实时滤波处理。 此外,采用大容量存储器与锂电池供电,使得仪器可以长时间运行,完成数据采集、处理与记录的功能。
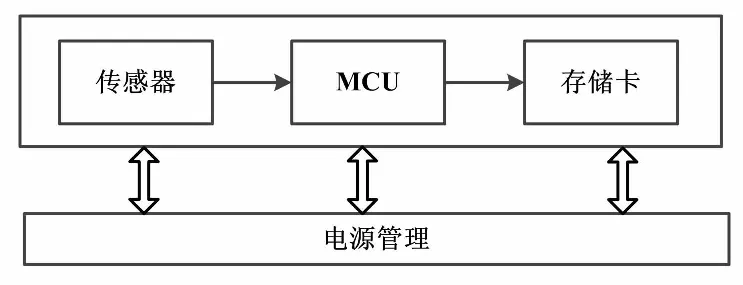
图2 原型结构框图
在仪器姿态与流速流向的转换过程中,采用文献[7]提出的滤波融合算法计算俯仰角θ与横滚角φ,再利用磁力计测量结果计算航向角Ψ。其中:俯仰角θ即为测流模块偏离竖直方向的倾角。由v-θ曲线可转换为流速值,而航向角Ψ即为流向值。考虑到水流环境的影响,在测量过程中仪器易受流体冲击而造成振荡、摆动,因此其外形设计采用三边内凹的等腰三角形柱体,以降低流体干扰、提高仪器在流体中的稳定性,并保证电路板航向偏移与流向一致。此外,算法上还采用了滑动平均滤波,以减少外部噪声干扰,确保定标试验的可行性与流速测量的可信度。
原型实物中,电路板竖直放置在三角测流柱体中。它与上方的牵引柱体用万向节连接,正式使用时可将其固定在浮标上。电路板和电池先进行密封处理防止进水,再放入三角柱体中。测流模块长度约18 cm,直径约8 cm,方便安装或者手持使用。
3 试验定标与误差分析
定标试验在上海市水上运动中心进行。将测流模块与漂浮物固定,放置于流速可调的水池中,流速分辨率为0.01 m/s。设置传感器采样频率为100 Hz,滤波处理后每秒存储一次姿态信息与相应的时间戳,将流速的调节范围控制在0~1 m/s之间。由初始零值开始,以0.1 m/s步进,每增加一个步长,维持60 s的记录时间。根据试验采集得到的倾角(均值)与对应的流速数据,利用式(6)进行曲线拟合,得到v-θ曲线。测量值与拟合曲线如图3所示。

图3 测量值与拟合曲线
根据拟合结果,得到拟合系数c为0.32,测量结果与拟合结果的均方根误差(root mean square error,RMSE)为0.04 m/s,R2确定系数为0.994 9,证明本文采用的近似拟合公式能够表示倾角与流速之间的对应关系。图3表明,当流速低于0.3 m/s,测量值与拟合值差别较大。这是引入拟合误差的主要原因。在低速范围测量时,由于水流推动力较小,测流模块易受自身结构与涡流的影响而发生摆动,并且由于仪器的外形设计使得模块重心无法与中心重合。因此,当流速为0时,模块不能完全垂直于水面,导致初始倾角偏移零点。随着流速的加快,推动力的增大使得测流模块保持平稳。因此,当流速高于0.3 m/s时,测量值与拟合值之间的误差较小,拟合性能提升。
定标曲线显示了流速与倾角之间的正比关系,得到倾角与流速值的转换公式。由于定标试验是在淡水中进行的,若要适应海水的测量环境,定标曲线还需根据淡水与海水的密度差异进行调节。此外,由于模块自身重量有限,为了增加其流速测量范围,需要在其底部添加一定的配重。不同的配重会导致测量范围的不同。由图3可知,当流速高于0.8 m/s时,倾角增速缓慢,测量灵敏度降低。因此,此次添加配重的有效测量范围为0~0.8 m/s。如果增加配重,还可相应扩大测流的范围。
航向角测量结果如图4所示。已知此时模块摆动方向为北偏西73°,可知经过滤波处理后的测量误差小于±1°,可用于实际流向监测。

图4 航向角测量结果
4 结束语
本文设计了一种倾斜式浮标海流计原型,并通过试验验证了其用于实际监测的可行性,得到倾角与流速的对应关系并分析了测量误差性能,对未来实际产品的研制具有指导性的意义。由于原型设计简单,定标不够精细,没有经过实际外海测试与对比测试,仍存在一定的缺陷。基于这些问题,课题组会对研制的下一代倾斜式海流计进行精细化定标,根据外海实测结果改进自身算法,调整外形结构并加入实时传输模块。新研制的海流计将具有较高的精确度,并且便于与风速仪等其它测量仪器集成,搭建海面风速-水流一体化监测系统。
