高原高速公路弯坡组合路段行车特性及安全性研究
2019-04-28胡立伟罗振武何越人杨锦青
胡立伟,罗振武,孟 玲,何越人,杨锦青
(昆明理工大学 交通工程学院,云南 昆明 650500)
0 引言
在高原高速公路中,由于受地形限制,导致复杂线性路段越来越多,其中一部分形成弯坡组合路段,也就是由平竖曲线构成的既转弯又上下坡路段。由于车辆在径向、法向、竖向进行三维运动,驾驶员对车辆行驶操控难度增大,视觉和心理上易产生较大估算错误,使得弯坡组合路段成为高速公路敏感区,并有可能演变成为交通事故的多发路段,影响行车舒适和安全。高速公路弯坡路段几何线形与交通事故关系密切,通过分析线形指标与事故的关系,掌握事故发生的一般规律,进而对高速公路进行安全评价[1-3]。为了进一步探究不同组合路线对高速公路安全的具体影响Wang Xuesong[4]与温铿航[5]等分别提出运行速度、速度差在很大程度上取决于坡度大小和方向。
目前国内外学者通过影响因素之间的关系建立相关分析模型成为研究热点。Qiang Zeng等根据事故严重程度分析公路事故率提出多变量随机参数Tobit模型[6-7]。然而,由于各国道路交通环境存在较大差异且影响高原高速公路安全性的因素是众多的,具体到某一路段上的事故率也往往是多个因素综合作用的结果。在充分考虑到高原地区事故致因及事故形态的内在联系,朱秋萍提出事故形态与车速之间的关系,得出弯道处行车安全的临界速度作为限速依据,并提出弯道处限速措施[8];驾驶员在高速公路不同线形路段上行驶,操作频率的高低导致驾驶工作负荷变化规律不同[9]。
由于高原高速与平原高速相比,其线形组合路段居多,驾驶负荷度较大,停车视距无法保证等特点,为此本文通过对高原高速公路弯坡组合路段特征断面车辆相关统计数据分析研究速度差、驾驶负荷与交通风险之间的关系,提出影响弯坡组合路段交通风险重要因素,从而对高原高速公路安全、改善对策以及优化几何线形设计成果具有重要意义。
1 弯坡组合路段划分及数据采集
1.1 弯坡组合路段划分。据国内相关研究结论[10-11],在综合考虑弯坡区段车速、驾驶负荷、事故率等因素的同时,结合线形条件考虑,本文将弯坡组合路段定义为坡度大于等于3%,转弯半径小于等于1 100m的连续组合路段。昆石高速公路几何详细线形指标见表1。
1.2 基础数据采集。为探讨弯坡组合路段在不同区段驾驶员受道路线形、交通状况和环境条件影响下其心理变化和车速变化规律,研究车辆交通行为的特征变化。本文以昆石高速公路为例,主要采集驾驶员在弯坡组合路段线形指标变化等特征点的驾驶负荷及速度梯度值。
(1)被试选择。根据试验目的,选择身体健康、驾驶反应正常的驾驶人在高速公路弯坡组合路段进行实车试验,试验车型选用别克威朗,选取不同行业具有不同驾驶经历的小型车驾驶人6名,要求驾驶人驾龄均超过5年,视力矫正在5.0以上,持有C照以上的男性驾驶人,且有良好的驾驶习惯和无重特大交通事故经历。
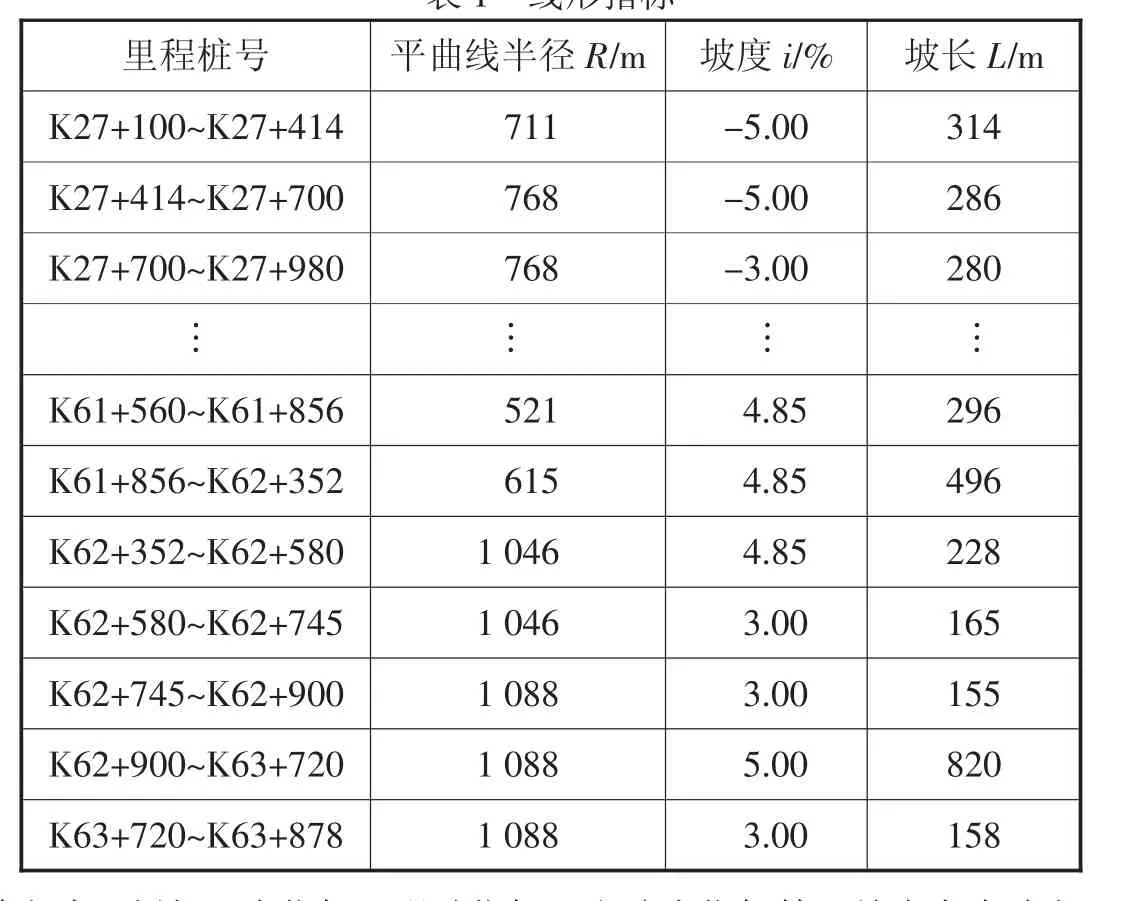
表1 线形指标
(2)驾驶负荷数据。表征驾驶人工作负荷的指标有多种方式,例如心电指标、眼动指标、和脑电指标等。综合考虑路段行驶心理的影响程度、数据采集方便性、指标可靠性,本文采用对断面运行速度对应的心率变异性(HRV)指标来表征驾驶负荷,采用HRV指标变化值与运行速度的比值作为评价驾驶人驾驶负荷。
试验路段主要仪器为biofeedback 2000 X-pert生物反馈仪、GPS、记录仪。采用HRV指标变化值和运行速度之比作为评价驾驶人驾驶负荷的指标即:
ij

式中:Kij为驾驶人i在道路j上的驾驶负荷;Aij为驾驶人i在道路j上的值;Ai为驾驶人i正常驾驶时的HRV值;Vij为驾驶人i在道路j上的车速。
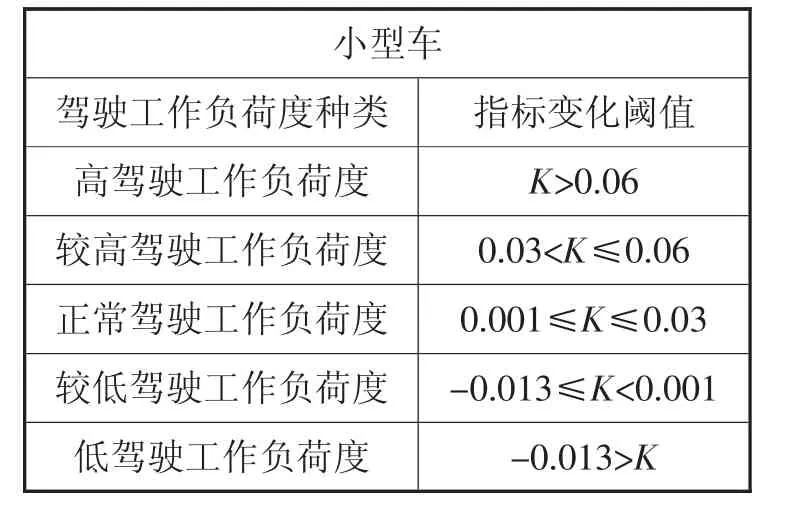
表2 CART驾驶负荷度分类阈值
本文采用CART方法分别对小型车实验数据进行分类,根据CART分类,初步得到驾驶工作负荷度CART阈值如表2所示。
(3)试验路段选择。昆石(K6+720~K73+490)为高原双向六车道高速公路,设计时速为100km·h-1,路基宽度为26m,平曲线最小半径为344m,缓和曲线长度最小为100m,最小凸曲线半径为9 000m,最大纵坡坡度为5%,最小纵坡坡度为零,由于昆石高速交通量较大,事故率整体偏高,事故形态主要以碰撞运动车辆及固定物为主。事故数据来自交管局事故处,事故共计2 152起。在研究分析速度差与事故率之间的关系时将数据转换为小时平均值。
2 高原高速弯坡组合路段车辆运行规律分析
2.1 高原弯坡组合路段小型车运行速度规律分析。综合考虑弯坡组合路段类型选取其中路段Ⅰ(K27+110~K30+115)、Ⅱ(K47+650~K50+800) 为连续急转弯下坡路段,路段Ⅲ(K61+560~K63+878) 是连续急转弯上坡路段。文献[13]对大、小车速度差分析,得出大小车速度差越大,事故率也增大,车辆在断面运行速度,V85速度差,速度梯度变化如图1所示。
由图1可以看出相邻路段运行速度梯度值ΔI最大为3.75km·h·100m,相邻路段运行速度差ΔV大于7km·h-1存在两段
v85(K28+301~K28+522,K62+580~K62+900),其中K28+301~K28+522为连续下坡弯坡路段,上一段连续下坡弯坡路段(坡度为-3%),后一段连续下坡弯坡路段(坡度为-5%)当坡度从-3%变至-5%时开始不断减速,导致运行速度差值过大;K62+580~K62+900为连续上坡弯坡路段,上一段连续上坡及弯坡路段(坡度为4.85%),后一段连续上坡弯坡路段(坡度为3%),坡度从5%变至3%时开始处于不断加速,坡度降低时速度提升导致运行速度差值过大。
小型车在区段一是由下坡驶入平曲线是先加速后匀减速过程,接着驶出平曲线时是继续下坡,在此区间汽车由于横向力不足,视觉感受变差,驾驶人会持续减速,从而保证车辆的稳定性;在区段二上坡驶入曲线,接着直线上坡驶出,驾驶人会根据自己对车速的感知对车速进行调整,即当前车速大于驾驶人该路段期望车速时,采取减速行为,表现为减速到匀速或小幅加速的过程。
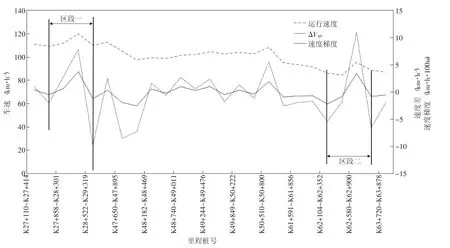
图1 小型车运行速度、V85速度差、速度梯度变化图

图2 V85速度差与事故率关系图
2.2 速度差与事故率的关系分析。由于受高原高速公路的地形及车辆性能的影响,小型车的V85速度差存在较大差异性,但纵观整体发现弯坡路段中V85速度差与事故率关系并不成线性比例。由图2得出V85速度差值在(0,4)区间时事故率的起伏变化是不稳定的,在连续急转弯上坡路段V85速度差绝对值较下坡路段的V85速度差绝对值大。在实际行驶过程中,车辆的运行速度通常与道路所处环境和地形有关,并不与路线的设计车速保持一致,这就导致驾驶员在实际行车时通常超过设计速度。车辆总体速度变化和事故频率是直接相关的,平均行驶速度与计算行车速度偏差越高,事故率也越高。
3 高原高速弯坡组合路段车辆驾驶负荷变化规律分析
由图3可以看出,弯坡组合路段驾驶符合具有如下特点:①随着车辆进入连续急转弯下坡路段,驾驶负荷逐渐增加,驾驶负荷在曲中段达到最大值;②当驶入长连续弯坡组合路段时,驾驶负荷先以比较快的速度上升,在临近曲中段达到较高的水平,接近出口段驾驶负荷以线形增长;③在连续上坡及弯坡路段,在入口段驾驶负荷处于最低,当驶入曲中段时驾驶负荷骤增。
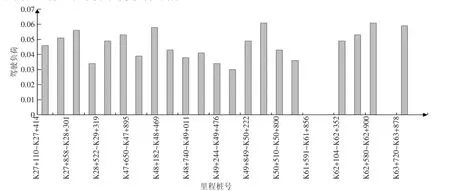
图3 弯坡组合路段驾驶负荷变化图
经统计,在弯坡组合路段,其下坡组合路段驾驶负荷平均值相对弯上坡组合路段平均值要大且入口段差值最大,下坡行驶时坡度变化及频繁制动减速共同导致驾驶负荷增加。
3.1 坡长与驾驶负荷的相关性。在弯坡组合路段行车时,驾驶人既要控制车辆行驶方向,又要控制车速,操作难度明显增加。因此,理论上坡长的增加可能会导致驾驶负荷增加。试验路段中道路坡度分布在2%~6%范围内。为了控制坡度对驾驶负荷的耦合影响,将单纵坡路段分为小于3%和大于3%(陡坡)两组。
图4为坡长与驾驶负荷的散点图,由图可知,当坡度<3%时,无论上坡或下坡,坡长与驾驶负荷之间的关系较为离散,但依然存在相关性,即随着坡长的增加,驾驶负荷呈增大趋势;当坡度>3%时,即坡度的增加驾驶负荷呈较快增长,其驾驶负荷的峰值大都集中在坡长250~350m范围内。此外,上坡路段其驾驶负荷的增长率是大于下坡路段其驾驶负荷的增长率。
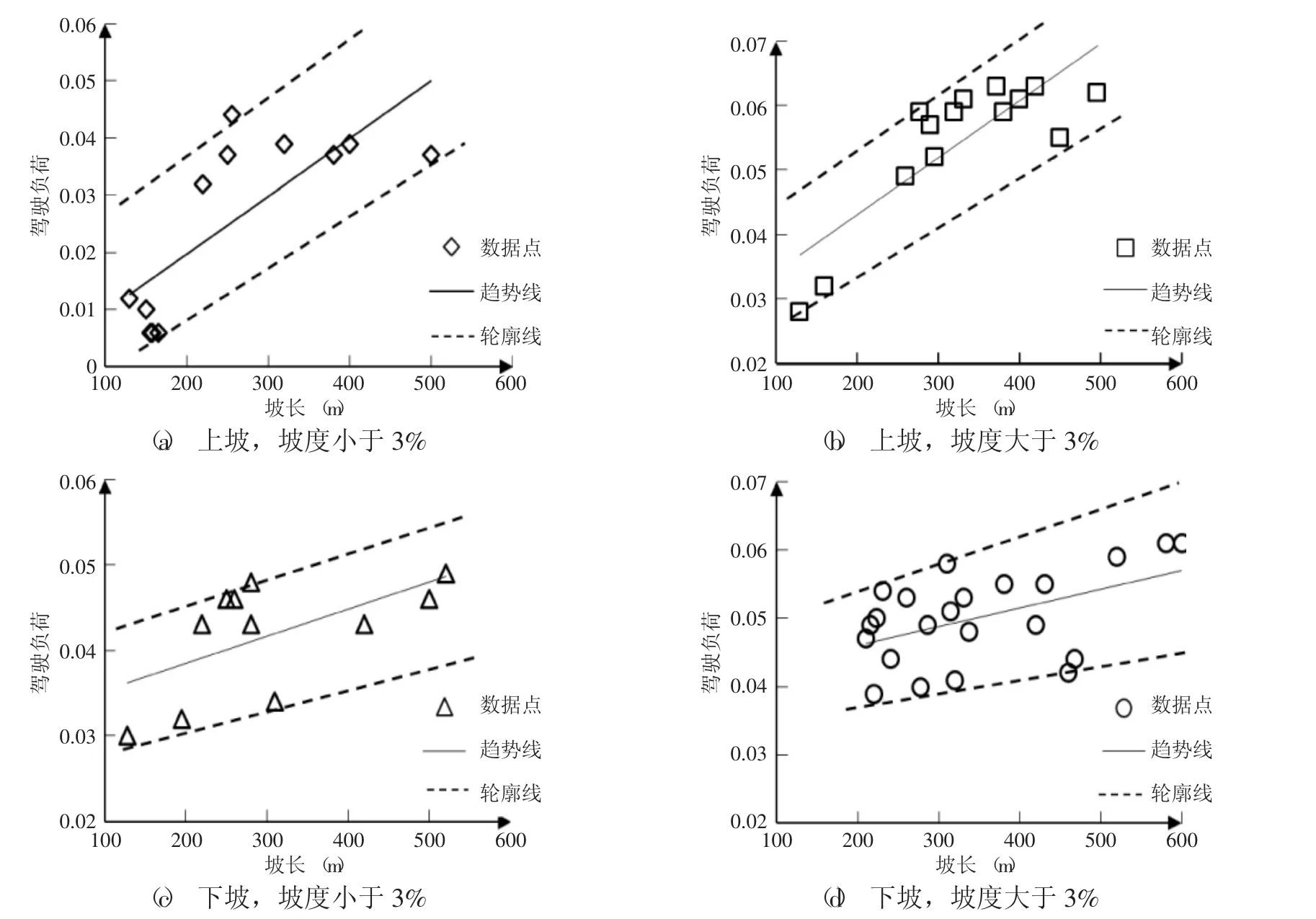
图4 坡长与驾驶负荷的散点图
3.2 坡度与驾驶负荷的相关性。根据纵坡的长度值,将路段分为3组:坡长<150m,150m≤坡长<300m,坡长≥300m,然后对同一范围内的坡长进行数据分析,尽量减少坡长对坡度的影响。
3.2.1 下坡路段。图5为下坡路段坡度与驾驶负荷的散点图。图中k为趋势线的斜率值,表示在不同坡度变化条件下其驾驶负荷的敏锐性。坡度在区间[2%,6%]范围内,随着坡度的增长,驾驶负荷呈现明显增长的趋势;坡长越长,驾驶负荷对坡度的变化越敏锐。图5(b)中驾驶负荷的趋势线斜率值最大,即当坡长在区间(150,300)且坡度在-5%时,驾驶负荷明显提高。坡度与驾驶负荷呈正相关,故随着坡度的增长会导致驾驶负荷的增长。在下坡路段(弯坡组合路段),驾驶人既须控制横向运动又要控制竖向运动,在控制方向的同时还需不间断踩制动踏板来控制车辆行驶,这些操作均使驾驶人的工作量增大。
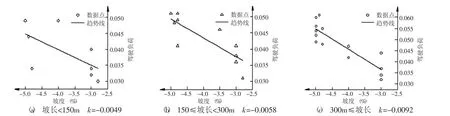
图5 下坡路段坡度与驾驶负荷的散点图
3.2.2 上坡路段。图6为上坡路段坡度与驾驶负荷的散点图。由图可知,在坡度区间[2%,6 % ]内,驾驶负荷与坡度之间是呈正相关性,即在坡度相同条件下其坡长越长,导致驾驶负荷出现增长趋势;坡度增长使驾驶负荷增加。驾驶负荷对坡度变化的敏锐性,究其原因在于,在坡度越大,上坡时行驶阻力越大,为了保持车辆行驶过程的稳定性,驾驶人在保持速度的同时需要持续的施加脚的操纵量;同时空间视距的减少会从视觉上给驾驶造成压力从图6(a),(b)和(c)发现,当坡度趋近5%时,驾驶负荷增长十分显著。
4 弯坡组合路段行车风险评价模型
4.1 影响指标筛选。国内外关于安全评价方法的研究分为两类:一类方法多采用历史事故数据建立评价指标与道路实际安全水平之间的关系,另一类是间接相关分析法[14],但是,如果能为安全评价指标选取适当的阈值,则能有效地通过评价指标对设计阶段的道路进行合理的安全评价。本文分析发现V85速度差在事故率服从多项分布,驾驶负荷与道路线形(坡度、坡长)呈现较强的正相关性。因此,选取速度差和驾驶负荷作为研究弯坡组合路段作为安全评价指标。

图6 上坡路段坡度与驾驶负荷的散点图
4.2 驾驶负荷模型的建立。驾驶负荷主要受道路线形、行车状态、路侧环境、气候条件以及驾驶人安全意识等因素的影响,其中道路线形及行车状态是影响驾驶负荷的关键因素,综合考虑上述影响因素的驾驶人驾驶负荷模型为:

式中:x1为道路线形指标;x2为行车状态指标;x3为路侧环境指标;x4为气候条件指标;x5为驾驶人安全意识指标。
道路线形指标主要包括弯坡组合路段平曲线半径R、坡度i、坡长L、等线形指标;行车状态指标主要指车辆在弯坡路段行驶的速度差。为进一步简化该模型,通过剔除路侧环境、气候条件等因素对驾驶负荷的影响,得到驾驶人驾驶负荷模型为:

通过对驾驶人在弯坡路段的驾驶负荷规律分析,在速度差不大于4km·h-1,上下坡坡度在区间[2%,6 %],驾驶负荷与坡度、坡长双因素相关。应用实验数据,采用MATLAB回归分析得到在弯坡路段驾驶负荷与坡度和坡长的关系模型为:

式中:R2为拟合优度。
5 案例评价
由驾驶负荷规律分析知,最大驾驶负荷处为K49~K50、K62~K63,位于路段曲中,驾驶人对道路线形的敏感性增加,且随着平曲线半径、坡度的变化,驾驶人需要将这些要素之间的有效协调和相互融合配对,导致持续处于高驾驶负荷状态。
根据昆石高速公路2013~2015年事故统计资料,剔除由非道路线形因素引起的事故后,具体事故风险统计如表3所示,高风险路段事故形态主要以碰撞固定物及碰撞运动车辆为主,事故严重程度及直接财产损失高于其他风险路段;位于较高风险路段的事故为31起,占总事故的55%,其事故形态多以碰撞固定物、侧滑、碰撞运动车辆为主,且事故严重程度高,与驾驶负荷计算的结果基本一致,根据驾驶负荷判别得到的高风险与较高风险路段与实际事故分布的主要桩号相匹配,驾驶负荷评价得到的高风险及较高风险路段与实际事故频发路段位置较为吻合。
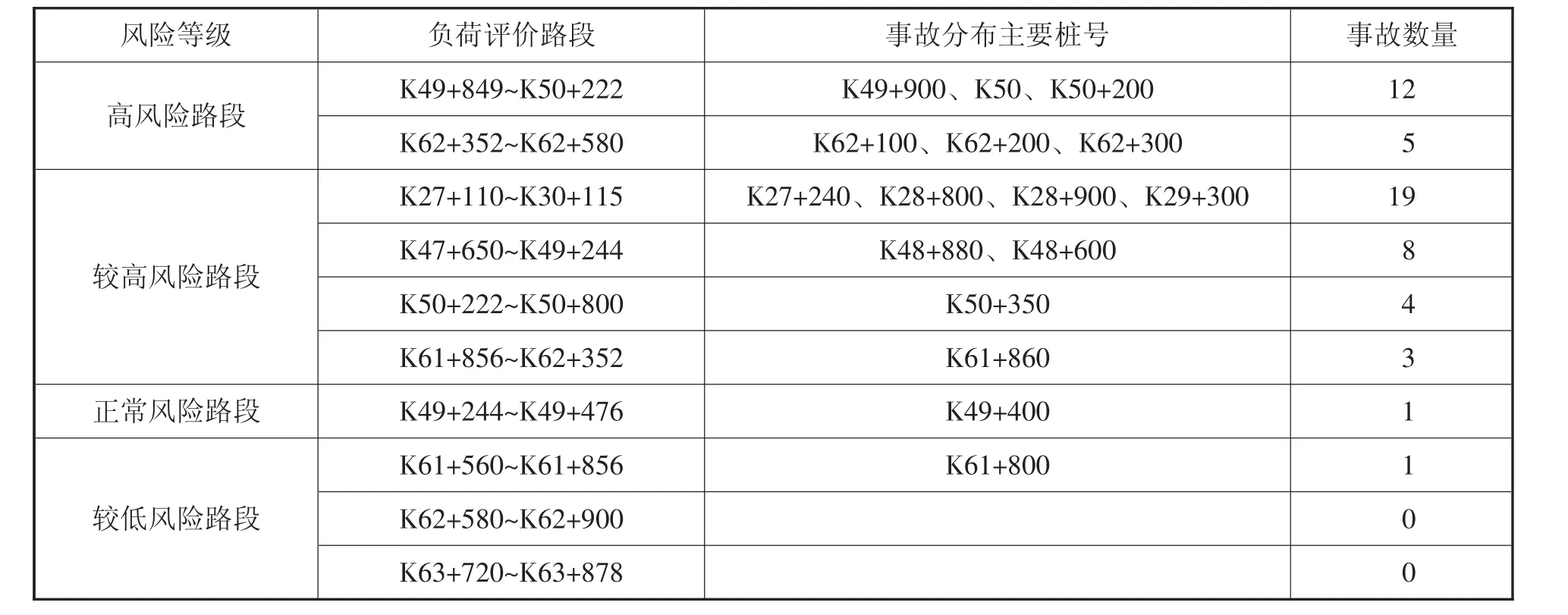
表3 交通事故风险统计
6 结论
(1)针对高速公路弯坡组合路段存在速度选择的不确定性及事故多发性的特点,通过对弯坡组合运行规律分析,在小半径大纵坡组合的弯坡上,运行速度受平曲线和纵坡的综合影响。从表面上看,小型车所受影响与平曲线作用相似,又与纵坡作用相似,但事实上与两者单独作用时均不同。运行速度所受影响程度,与组合方式有关。
(2)根据在弯坡组合路段的心率变异性的实车试验结果表明,对于弯坡组合路段,弯下坡驾驶负荷的平均值高于弯上坡驾驶负荷的平均值,表明驾驶人在弯下坡路段的紧迫感高于弯上坡路段;驾驶人在弯下坡路段的线形敏感性高于弯上坡路段且不同年龄驾驶人敏感性存在较为明显的差别。
(3)坡度、坡长与驾驶负荷均呈现较强的正相关性,其中下坡坡度为5%时,驾驶负荷明显增加,并建立了与坡度、坡长和车速差的驾驶负荷模型。通过交通事故数据统计分析,事故多发路段与驾驶负荷中高、较高风险路段相匹配。