基于多能源集成控制的港口绿色照明系统逆变控制研究
2019-04-26张智华易百万
张智华,徐 迪,易百万
(南通航运职业技术学院,江苏 南通 226010)
一、引言
港口所在区域一般太阳能和风能的资源比较丰富,考虑采用风能、太阳能及市电的多动力源互补供电,该技术可以解决港口照明系统中电能利用率不高、能量消耗过大、费用较多及浪费严重的现象,因此在此背景下,设计一种多动力源集成控制的港口绿色照明及环境监测系统,使得港口照明系统的自动控制程度提高,又达到既节约电能、保护环境及环境安全监控提示的功能,则是将来的研究方向与热点。同时可以进一步加深绿色港口、信息化港口建设的需要,为后期智慧港口的建设打下基础。风光互补应用系统,利用太阳能电池方阵、风力发电机将发出的电能存储到蓄电池或者超级电容组中,当用户需要用电时,逆变器将蓄电池或者超级电容组中储存的直流电转变为交流电,通过输电线路送到用户负载处。则逆变器控制策略的研究关系到电能质量的稳定控制[1-3]。
二、港口绿色照明系统逆变控制策略仿真分析
逆变器,作为风光互补发电系统的重要组成部分,主要功能是将风能、光伏、蓄电池或者超级电容组输出的直流电能转换成港口照明系统可用的交流电能,保证港口照明系统负载的正常运行。因此,逆变器的控制策略及其重要,直接影响到整个系统的稳定性。通过研究绿色照明系统的控制要求,确保电能质量的稳定,提出了双闭环控制的控制策略,利用MATLAB/Simulink仿真平台建立了逆变控制模型,通过仿真结果的分析显示,控制算法能够使照明系统很好的实现负载电能质量的稳定。
(一)双环控制方式
在风光互补发电系统中,逆变器的工作模式是高频的PWM开关模式,由式(1)可知,输出端会产生大量的高频谐波,为考虑电能质量稳定,考虑增设滤波环节,得以减少高频谐波对负载的不良影响。然而如果逆变器的结构和元件已经确定,那么控制算法和策略便是决定性能优劣的重要因素[4-5]。

对于离网模式下的逆变器,没有外接电压直接带负载,只要用户负载在合理范围内变动,逆变器电压应当保持稳定。因此可将逆变器视为电压源,一般方法是控制负载端的电压,这样能够保证交流负载的电压幅值稳定、高频谐波尽量少。一般的双闭环逆变控制系统是在假设逆变器输入侧直流母线电压稳定的基础上设计的,但是实际上由于风速和风向、光照和环境温度的随机性,系统前级发电功率是有波动的。加上MPPT策略的应用,获得了最大功率的同时也决定了DC-DC升压后的直流母线电压不是恒定的,会随着MPPT点的变化而波动。那么如果逆变器输入侧的直流母线电压仍采用恒压控制,就无法实现系统随环境波动下的MPPT。为此本文在常规双闭环控制的基础上,通过将输入侧直流母线电压引入到闭环控制系统中,由电流内环和电压外环串联而成,能够快速响应输入电压的波动。
(二)逆变控制仿真分析
通过搭建Matlab/Simulink控制仿真模型,验证提出的控制策略。SPWM采用单极性调制,其中仿真参数设置为:滤波电容Co=1000uf,滤波电感Lo=5mH,逆变系统开关频率选取为20kHz。仿真算法采用步长为ode23t,误差为1e-3。

图1 逆变器控制的Simulink仿真模型
仿真模型中如图1所示产生可变直流电压Vbus,作为直流侧输入电压,电压范围在60V-80V、 RL额定功率为200W;Subsystem2表示控制模块;开关Breaker表示负载的变化情况;仿真结果见图2所示。
负载电压URL的幅值和频率基本稳定,其中电压U为100V/格,电流为2A/格,从结果中可以看出,逆变器仿真波形能够满足负载的要求。

图2 逆变器离网控制的仿真结果
三、 系统逆变控制单元硬件设计
系统硬件电路包括控制电路板一块,信号采样电路板一块,PWM驱动电路板一块,电源电路板一块,主电路一块。
(一)控制系统电源设计
电源板电路主要用来为系统中其他电路板的芯片供电,所以需要输出功率比较大的一款电源芯片,电源电路以NI的电源管理芯片LM5010为主芯片。由于LM5010具有为6伏到76伏宽度的输入电源范围,并且可管理将近1A的电流,所以选择LM5010作为电源管理芯片。
电路板都需要5V电压对芯片进行供电,并且在模拟电压和数字电压中都要用到5V电压,所以电源板电路中用到4块的5V电源芯片。
(二)直流侧滤波电容设计
直流电容容量的设计是基于直流母线的电压,和直流母线的容量功率P和直流母线的纹波Vr-r参数来设计的。其中对于系统来说功率P=250W,电压V=96V,纹波Vr-r=1V,调制开关频率为20kHz。
电容C的大小:

其中,RL负载电阻,C滤波电容一般采用电解电容,电容器耐压应大于,通常取2~3倍的直流侧电压U2。系统电容计算公式如下:

电容取2~3倍,则取为330uF电解电容。电容耐压一般取为2~3倍的U2,则最大耐电压取为1000V。
(三)逆变输出滤波器设计
逆变系统采用二阶LC滤波,滤波电感电流纹波最大值的计算公式为:


其中,Lf为滤波电感,fs为开关频率、取值为20Hz,Vdc_bus输入侧直流母线电压。
一般在选择滤波电容Cf时,认为滤波器的截止频率fn远远低于调制开关频率fs。取截止频率fn大于工频频率f0的10倍,为fs的0.1倍,即


把以上计算得到的fs和Lf代入上式,得到Cf≥3.2μF。考虑到需要抑制低次谐波,同时不能让电流应力太大,Cf常取理论值的5-7倍。由此可取Cf=22uF。
(四)信号采样电路设计
为缩小传感器电路板体积,没有选用霍尔传感器,传感器芯片选为安华科技的模拟半导体器件ACPL-C785,ACPL-C785的输出是交流信号,但后级信号处理电路中的运放为单电源电路,所以ACPL-C785输出的交流信号电压需抬高,并且由于信号经过运放处理之后送给DSP,所以运放电源为3.3伏,以防止信号高于3.3V时损伤DSP。
直流信号处理,在系统中需要采集直流信号:直流侧母线电压信号。由于光伏电池电压与微处理器DSP为共地,并且为低压,所以不需要隔离芯片,采用一般的运放电路处理即可。光伏电池电压经过分压电阻后,与1.65V电压进行比较,比较结果用于管理光伏系统中的电源。由电源管理芯片LM5010可知,当输入电源小于5伏时,芯片不工作,光伏系统处于休眠,当光伏电池的电压大于5伏时,电源管理芯片被激活,光伏系统电源带电。
四、 逆变系统软件设计
(一)逆变主程序流程

图3 主程序流程图
主程序开始对处理器的外设进行初始化,流程如图3所示,对使用的EVA/B事件管理器进行开启,对使用的GPIO口进行初始化参数设置,并进入系统循环程序内。
(二)PWM算法实现
整个逆变控制系统共需要4路占空比可调的PWM信号,对4路单极性SPWM信号驱动的全桥逆变开关管进行控制。系统中的三角载波发生器选取DSP2812的EVA的T1定时器,使用COMP1、COMP2全比较单元分别产生两组互补的PWM信号进行对全桥逆变开关管的控制。由COMP1产生的PWM1和PWM2控制高频桥臂的功率管S3和S4;由COMP2产生的PWM3和PWM4控制低频桥臂的功率管S1和S2。
在控制算法中,SPWM的控制信号为Msinθ,调制度M=0~0.9。逆变器输出电压Uc与PI电流调节器的输出之和,再除以直流侧母线电压Vbus,得到M,然后查询正弦表得到CMPR1值。定时器T1在下溢中断时将该值加载到CMPR1,产生的PWM1和PWM2分别来控制高频桥臂的S3、S4开关管。
五、系统调试与分析
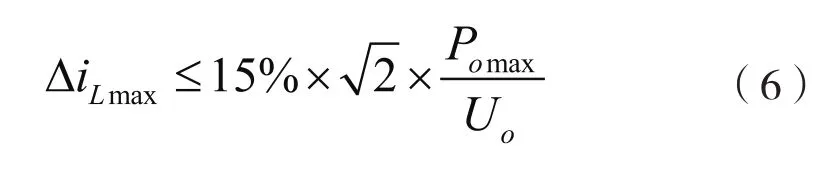
在以上硬件和软件系统的基础上,搭建了1kW的离网逆变器,包括主电路板,电源板,驱动板,处理器控制板。通过测试平台的检测,逆变器驱动脉冲波形如图4所示。
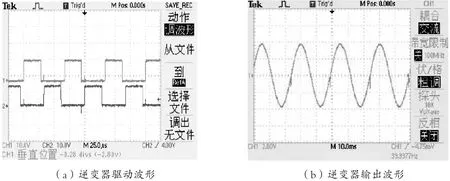
图4 逆变器驱动脉冲波形
图4(a)所示为逆变器驱动波形,由于逆变器在SPWM输出工作时,驱动波形占空比是连续从0到0.9变化的。在DSP中,设置PWM输出载波比为0.9,所以图4(a)只是逆变器SPWM工作时一个瞬间的上下峭壁的波形。图4(b)所示逆变器交流侧输出电压波形。
六、结论
通过对系统中逆变器侧的滤波元件的参数建立数学模型,分析设计了滤波器的参数。同时对系统使用的控制软件进行了详细的研究,主要分析了系统中典型的应用程序,包括主程序,SPWM程序,PI控制子程序。最后对系统软硬件综合调试,得到系统输出波形,对的输出波形进行分析,试验结果符合系统设计,验证了系统的控制策略。为设计基于多能源集成控制的港口绿色照明系统提供了研究基础。
