一种除屋檐冰棱机的结构设计及动力学特性分析
2019-04-26孔俊超王玉勤李晓光钱森森吴海兵华家宝
孔俊超 王玉勤 李晓光 钱森森 吴海兵 华家宝
(1.巢湖学院机械工程学院 安徽合肥 238000;2.安徽粮食工程职业学院机电工程系 安徽合肥 230011)
我国北方部分区域初春转暖之际,房屋积雪融化会在屋檐下表面出现冰棱,冰棱自然坠落会严重威胁过往人群安全[1]。目前屋檐冰棱大多是自然融化坠落,少部分为人工用竹竿清除,极少数城市采用消防车、云梯除冰。无论是竹竿或消防除冰不仅费时费力、效率低,同时除冰人员的安全得不到保障。因此采用合适的机械半自动、自动化除冰十分有必要。目前国内除冰机主要是用于输电线、路面除冰,而屋檐除冰机相对较少,针对屋檐除冰领域的研究技术十分有必要[2-5]。
本文首先设计一种屋檐除冰棱机,由主运动的偏置曲柄滑块机构、升降的“X”型杆机构组成。其次,根据给定行程速比系数K、偏距e、滑块行程H设计偏置的曲柄滑块机构,得出运动尺寸。再分析主运动机构的运动特性,判断行程速比系数为K、速度波动是否满足条件。最后,分析主运动机构的等效动力学模型,得出等效构件曲柄的等效力矩和等效转动惯量。
一、工作原理
除屋檐冰棱机由主运动的偏置曲柄滑块机构、控制高度的“X”型杆机构组成。图1为屋檐除冰棱机的原理图,包括下底座、导轨、万向轮、连接杆、螺杆、集冰箱、电机、曲柄、导轨、连杆、锤头、推送箱、上底座、旋转把手、“X”型杆。
工作原理如下:转动旋转把手,螺杆随之转动,连接杆6带动连接杆4和8分别在导轨内滑动,从而改变“X”型杆的高度,实现机构的升降。当装置调节到合适高度后,启动电机,电机带动曲柄转动,曲柄通过连杆带动锤头(滑块)在导轨内水平方向的移动,锤头反复作用下,实现除冰的目的,屋檐的冰棱进入集冰箱内。
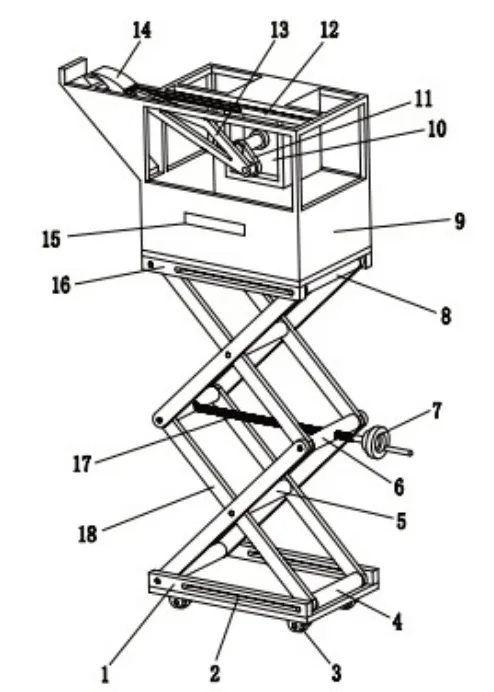
图1 除冰棱机的原理图
二、曲柄滑块机构的运动尺寸设计
除屋檐冰棱机的主运动机构为偏置曲柄滑块机构,从动件锤头的行程速比系数K 和极位夹角θ 表征机构的急回特性[6],它们之间的关系为

给定锤头(滑块)的行程H、极为夹角θ、偏距e,可确定偏置曲柄滑块机构固定铰链A的位置轨迹,如图2所示。A为固定铰链点,C1和C2为滑块的左右极限位置点,B1、B2为曲柄极限位置的活动铰链中心。AB=a为曲柄长度,B2C2=B1C1=b为连杆长度,C1C2=H为滑块行程,AC1=b-a,AC2=b+a。过C1、C2做圆满足条件:选C1C2对应的圆周角∠C1AC2=θ,即∠AC2C1=900-θ。作偏距线与C1C2的距离为e,与圆弧交点为所求固定铰链点A。曲柄长度a=(AC2-AC1)/2,连杆长度b=(AC1+AC2)/2。因此,偏置曲柄滑块机构的运动尺寸唯一确定[7]。
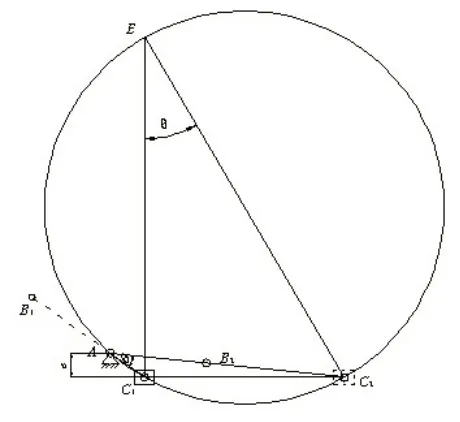
图2 主运动机构的固定铰链位置轨迹图
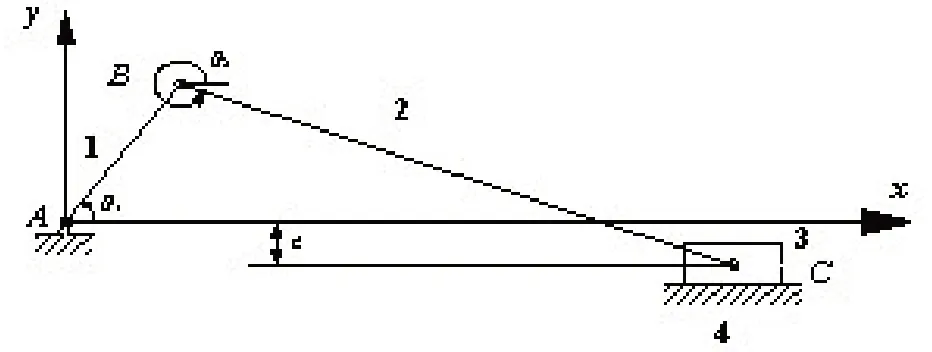
图3 主运动机构的运动示意图
三、运动分析
除冰棱机主运动机构的运动分析包括位置、速度分析。如图3所示,取A为坐标原点,滑块移动方向的向右为x轴正方向,建立坐标系Oxy。构件1和2的长度分别为l1、l2,偏心距为e。构件1和2的转动角度分别为θ1和θ2。由图3中所示的各构件矢量方程关系,得

由上式,得构件2的转动角度θ2和滑块的位移sc为

对式(2)求导可得,

由上式,构件2的角速度w2和滑块的速度vc

四、等效动力学模型
机械系统的真实运动规律取决于作用在机械系统上的外力、转动惯量。除冰棱机主运动的偏置曲柄滑块机构为单自由度系统,只要某一构件的运动规律确定,其余构件的运动规律也随之确定。在研究机械系统的运动情况时,为使问题简化,将整个机械系统的运动问题简化为单个构件,即曲柄的运动问题。为保持机械系统的原有运动情况不变,把各构件所有作用的外力、外力矩等都转化到选定构件曲柄,其余构件的质量、转动惯量等效的转化到选定构件曲柄[8-9]。
(一)等效力矩Me。
取机械系统中的绕定轴转动的曲柄为等效构件,则其上作用的是等效力矩Me。由功率相等原则,等效力矩Me为

(二)等效转动惯量。整个偏心曲柄滑块机构的动能为

由动能相等,得整个偏心曲柄滑块机构相对曲柄转动中心的等效转动惯量Je为

五、基于MATLAB的计算实例
除冰棱机的偏置曲柄滑块机构参数如下:偏距滑块行程H=400mm,e=50mm,行程速比系数K=1.4。点B到连杆质心S2的距离为连杆长度的一半。曲柄质量m1=1kg,连杆质量m2=2kg,滑块质量m3=5kg。曲柄对转动中心A的转动惯量J1=3kg·m2,连杆对其质心的转动惯量J2=1kg·m2。曲柄的转速为w1=10rad/s,驱动力矩M1=100N·m,阻力F3=10N。
(一)运动尺寸分析。行程速比系数K=1.4,得极位夹角θ=300。由图2分析,得AC1=84mm,AC2=472mm,因此曲柄长度a=194mm,连杆长度b=278mm。
(二)运动特性分析。图4为主运动机构的运动特性分析图。图4(a)为连杆的角位移θ2,连杆的角位移相对较小为-610~300。图4(b)为滑块的位移s,滑块的位置为75~475m,即行程为400mm,通常相邻冰棱为100mm左右,可以一次性清除多个(4个)冰棱。滑块第一次位置为475mm时,对应曲柄转角为00;滑块第一次位置为75mm时,曲柄转角为1500;即回程的曲柄转角为1500。滑块第一次位置为75mm时,对应曲柄转角为1500;滑块第二次位置为475mm时,曲柄转角为3600;即推程曲柄转角为2100。则行程速比系数为K=2100/1500=1.4。
图4(c)为连杆的角速度,变化范围为-7~7rad/s,连杆速度波动较小,稳定性相对较好。图4(d)为滑块的速度,变化范围为-2.8~2.2m/s。最大速度和最小速度对应的曲柄转角分别为700和2800,平均速度vm=0.3m/s,速度波动为δ=0.11。通常许用速度波动为[δ]=1/20~1/5[9],故满足条件。

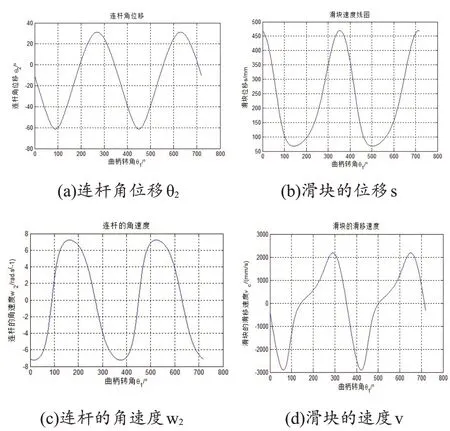
图4 主运动机构的运动特性图
(三)等效动力学模型。如图5(a)所示,等效构件曲柄的等效力矩为稳定周期性变化,等效力矩变化范围为0.978×105N·mm~1.03×105N·mm。如图5(b)所示,等效转动惯量为不稳定周期性变化,出现两个峰值大小分别为3.3×105kg·mm2和5.4×105kg·mm2。
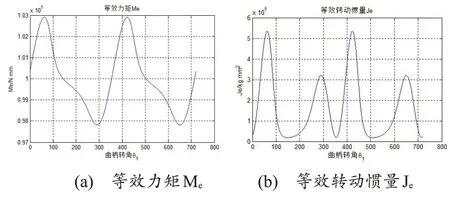
图5 等效力矩Me及等效转动惯量Je的变化曲线
六、结语
设计一种屋檐除冰棱机,由主运动的偏置曲柄滑块机构、升降的“X”型杆机构组成。首先,根据给定行程速比系数K、偏距e、滑块行程H设计偏置的曲柄滑块机构,得出运动尺寸,即曲柄长度a和连杆长度b。然后,分析主运动机构的运动特性,滑块的位置为75~475mm,即行程为400mm,可以一次性清除多个冰棱。推程运动角为2100,回程运动角为1500,行程速比系数为K=1.4,速度波动为δ=0.11故满足许用条件。最后,分析主运动机构的等效动力学模型,等效构件曲柄的等效力矩为稳定周期性变化,等效力矩变化范围为0.978×105N·mm~1.03×105N·mm,等效转动惯量为不稳定周期性变化,出现两个峰值大小分别为3.3×105kg·mm2和5.4×105kg·mm2。