基于机器视觉的无人机电力巡线技术
2019-04-26陈凤翔刘博迪方广东
文/陈凤翔 刘博迪 方广东
1 引言
随着工业用电和人民生活用电量的不断增加,我国的电力设施建设不断增加。我国的高压输电线不断应用在远距离电力输送中,这种高压和特高压的输电线路对于我国电力资源的输送具有重要的作用。但是输电线暴露在大气环境中,承受大量的自然和认为的影响。因此需要定期对电力线路进行巡查,及时发现线路故障,保障工业和人民生活正常用电。随着科学技术的进步,传统的巡线方式已经不适用于目前的巡线工作,机器视觉处理技术的快速发展,促使了无人机巡线技术的快速发展。
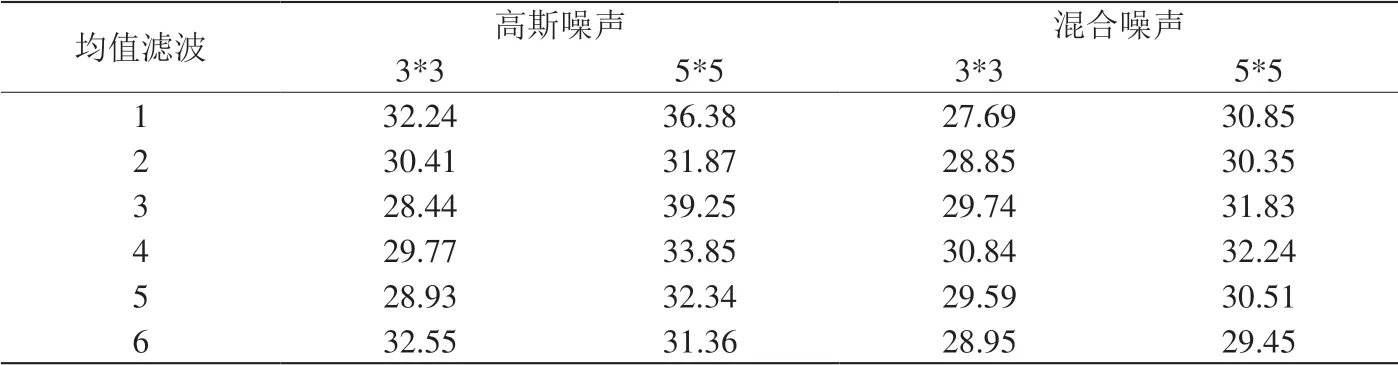
表1:峰值信噪比对比
2 无人机巡线关键技术
2.1 无人机巡线特点
随着无人机飞行技术和机器视觉技术的发展,采用无人机巡线技术已经逐渐应用在电力巡线领域。固定翼型无人机在日常巡线过程中较为常用,该机型的巡航速度在90-250km/h,可以采用手动或自动巡航模式,机动性较好,但是固定翼无人机只能按照单向巡航,且无法悬停。四旋翼无人机是直升机的变形,动力源依靠多个螺旋翼提供,由于机型小、占用空间小、可以在空中悬停的特点,广泛地应用在电力巡检中,但是四旋翼无人机也具有质量轻、强风中工作不稳定等缺点。无人驾驶型直升机利用程序自动控制飞行,依靠螺旋桨提供动力,可实现直接起降、悬停拍摄。
由于不同类型的无人机的特点和适用的场景不同,因此针对不同的电力线路状况,采取不同的无人机组合进行电力巡检,目前主要采用固定翼无人机和无人驾驶直升机组合以及固定翼无人机和四旋翼无人机组合的两种无人机巡线组合方式。

表2:峰值信噪比对比
2.2 无人机巡线系统分析
图1为无人机巡线系统组成,无人机飞行控制系统是无人机的大脑,主要控制无人机的飞行姿态和巡航的状态。无人机定位系统主要控制无人机的巡航线路,通过GPS导航系统对巡航线路进行定位,通过数据重构技术进行行程的三维图形识别。图像采集模块主要对航拍图像进行处理,主要包括滤波、去重复和边缘检测等内容,空地通信模块主要起到信息传递和诊断作用。
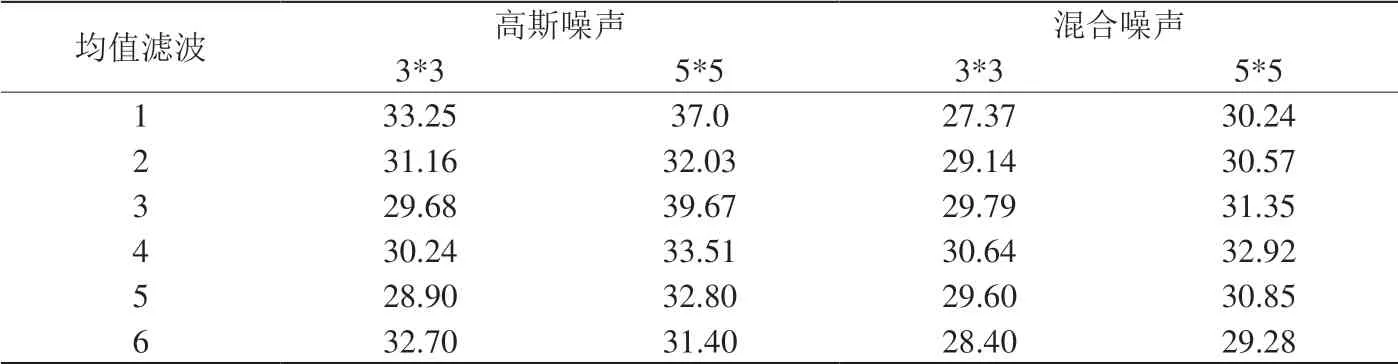
表3:峰值信噪比对比
3 航拍电力线路图像处理方法
3.1 视频去噪处理
无人机拍摄的视频主要存储在视频中的关键帧中,对无人机拍摄视频的处理就是对其关键帧的处理,无人机在拍摄过程中受到拍摄环境、仪器缺陷、采光等因素的影响,因此对于无人机拍摄的视频的需要进行除噪处理,提高图像的品质。本文对比均值滤波、中值滤波和和维纳滤波技术去噪效果。均值滤波通过对滤波模板内像素取均值,随后将待处理的像素点采用像素均均值进行替换,采用函数表示为:

图1:无人机控制系统
其中n为模板中像素数。模板相应系数为:

中值滤波通过对领域像素排序,对孤立点的像素进行排除,进而实现噪声抑制和图像细节的统一,函数表示为:

其中p(x,y)和d(x,y)表示为视频帧原图像和去噪后的图像。
维纳滤波是一种典型的线性滤波,主要用来提取被噪声污染的图像,主要处理方法是求取一个正常图像f的估计值计算f和的均方差,求取其最小值min e2。滤波方法如下所示,求取pxy得灰度值:

其中v2为噪声方差,利用替代原始灰度值f(x,y)。
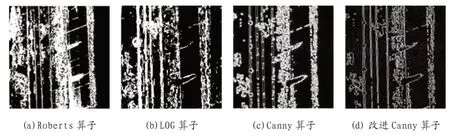
图2:航拍图像处理效果图
3.2 算法实验对比分析
3.2.1 均值滤波结果
通过对混合有高斯噪音和混合噪音的图像进行均值滤波处理,选择3*3模板和5*5模板,对比两种噪声处理结果如表1所示。
通过表1可以看出采用5*5模版时结果较好,特别是处理高斯噪声时,效果相对于混合噪声更好,但是对于高斯噪声滤波处理之后导致图像变得模糊,因此导致了图像的进一步处理,由此表明,采用均值滤波对图像进行处理并不完全适用于航拍图像。
3.2.2 中值滤波
通过采用中值滤波技术对混合有高斯噪音和混合噪音的图像进行均值滤波处理,选择3*3模板和5*5模板,对比两种噪声处理结果如表2所示。
通过表2可知,中值滤波处理噪声图像的效果也非常不理想,但是相对于均值滤波来说处理效果较差,虽然采用中值滤波处理孤立噪声点较为优良,对于高斯噪声和混合噪声的处理效果非常不理想,由此表明采用中值滤波处理航拍视频也不是最优良的方案。
3.2.3 维纳滤波
通过采用维纳滤波技术对混合有高斯噪音和混合噪音的图像进行均值滤波处理,选择3*3模板和5*5模板,对比两种噪声处理结果如表3所示。
采用维纳滤波技术处理混合噪声较为理想,可以极大程度上去除多余的噪音,并且对于图像的细节可以更好的保留,对于图像的后续处理更为方便可靠。通过对比分析可以发现,维纳滤波处理图像噪音的效果较好。
4 复杂背景下电力线路提取、识别和跟踪
4.1 图像分割
图像分割技术是根据既定的分割规则,将图像分割成独立的区域。在一幅图像上,我们往往只关注纹理、颜色和灰度等与周围具有一定区别区域的特征,往往这些区域的差别非常小,因图像分割主要就是将这些区域识别出来。本文对Roberts算子、LOG算子、Canny算子和改进Canny算子进行边缘检测,检测结果如图2所示。
如图2所示,Roberts算子的电力线的提取效果最差,主要是由于Roberts算子没有降噪平滑处理导致的;LOG算子受噪声的影响较小,主要是LOG算子提前做了高斯滤波处理,但是电力线边缘的较为模糊;Canny算子提取的效果相对于Roberts算子和LOG算子稍微好一些,但是背景和输电线的区分不是十分明显,并且像素点过于堆积;改进Canny算子,较好的提取边缘,并且对于噪声较好的进行了抑制。通过对图像分割发现,采用一种算子进行图像提取,效果往往达不到要求,还需要进一步进行处理。
4.2 电力线算法提取
通过图像分割中图像边缘提取之后发现,需要进一步采取图像处理技术进行图像处理。算法的处理效果主要通过以下两个方面进行评价:首先是边缘点的检测数量;其次是线型分布是否平滑。由图3a可以看出采用Hough变换算法提取电力线较为不完整,主要是Hough变换对于强对比度的图像提取不完整;图3b采用相位编组融合算法与Hough算法恰恰相反,相位编组融合算法对于低对比度的图像敏感度较高,因此提取的线形较为平滑,稳定度相对较高,但是此种算法提取出道路边缘,干扰性较大;图3c为采用融合算法的实验图,如图所示,该算法对于电力线的提取程度较为完整,兼有两种算法的优点。
5 总结
本文基于机器视觉得无人机电力巡检工作,分析了无人机寻线关键技术、无人机巡线系统关键问题、航拍电力线路图像处理方法三方面的内容。根据各种类型无人机的优缺点,发现采用固定翼无人机和无人驾驶直升机组合以及固定翼无人机和四旋翼无人机组合的两种无人机巡线组合方式较为符合目前我国的电力线路实际情况;采用维纳滤波处理图像噪音的效果相对于均值滤波和中值滤波效果更好;采用一种算子进行图像提取,效果往往达不到要求,还需要进一步进行处理,Hough变换和相位编组融合算法对于电力线的提取程度较为完整,兼有两种算法的优点。
