基于语音交互系统的导盲机器人设计
2019-04-26金祝王永兰
文/金祝 王永兰
我国是世界上盲人数量最多的国家,目前,这个数据还在呈上升趋势,视障群体将在弱势群体中占据很大比重。视障关爱是实现以人为本的政治目标的必经之路,是社会主义文明建设的基础课程,更是经济发展和科学技术进步的造福目标。现在市面上有许多导盲产品,例如导盲杖、导盲仪等,但皆因成本高、准确度差、不易携带等缺点无法很好地满足盲人群体的需求,就算是导盲犬,也会面临“拒乘”、“禁入”等问题。因而设计一款实用的导盲机器人来帮助视觉障碍者有着十分重要的意义。本文为此设计以语音交互系统为核心的导盲机器人,通过人机交互,大大方便了盲人使用者的出行便捷。
1 系统总体设计
导盲机器人主要是为了给盲人和视力障碍者在公共场所行进提供导航,在这种环境中,机器人通过与人的语音交互,将使用者安全准确的带到目的地。根据视觉障碍者的出行需求,小车设计了引导、避障、提示、识别等功能。在前进的过程中,机器人感应到障碍物、红绿灯后通过语音提示模块播报消息来告知使用者。如“前方有障碍物”、“红灯”、“绿灯”等相应提示。同时,使用者可以通过语音与机器人交互来控制机器人前进、停止和行走方向,机器人可以完全按照使用者的意愿工作,为使用者提供了一定程度的便捷。总系统控制框图如图1所示。
2 系统硬件设计
2.1 机器人结构设计
本文设计的机器人以PVC板和铜柱为支撑结构,其基于Arduino UNO开发板,利用超声波传感器、红外探头探测障碍物,运用语音模块发出相应提示信息,帮助盲人作出正确判断。这款导盲机器人具备引导、避障、提示、识别等功能,同时使用了双探杆作为机器人与盲人之间连接的纽带,使其更加稳定的同时在盲人使用完毕后可以轻松将小车收取。相比较高端导盲产品,它具有外观时尚、性能稳定、易于操作和方便携带等优点,具有强大的功能吸引力和价值满足感。
2.2 超声波模块
目前超声波测距有脉冲回波法、共振法和频差法,其中常用脉冲回波法测距。本文选用深圳市电应普科技有限公司US-100超声波测距模块,如图2所示。它可提供2cm-4.5m的非接触式距离感测功能,拥有2.4V-5.5V的宽电压输入范围,静态功耗低于2MA,自带温度传感器对测距结果进行校正,同时具有GPIO、串口等多种通信方式,内带看门狗,工作稳定可靠。
2.3 红外模块
红外传感避障硬件操作简便、实时性强,是目前最为常见的避障方法。本文采用的红外模块为北京亿学通电子的E18-D80NK模块,如图3所示。这是一种集发射与接收于一体的光电传感器,发射光经过调制后发出,接收头对反射光进行解调输出。该传感器具有探测距离远、受可见光干扰小、价格便宜、易于装配、使用方便等特点,可以广泛应用于机器人避障、流水线计件等众多场合。
2.4 灰度模块
目前灰度传感器是在独立光电二极管上覆盖经过修正的红、绿、蓝滤光片,对输出信号进行处理,将颜色识别出来。在有效的检测距离内,发光二极管发出白光,照射在检测面上,检测面反射部分光线,光敏电阻检测此光线的强度并将其转换为机器人可以识别的信号,其原理图如图4所示。通过模块返回的灰度值的大小判断所识别的颜色,与预设定颜色的数值进行对比,取相似度最高的颜色作为识别到的颜色。
3 语音交互系统
3.1 LD3320简介
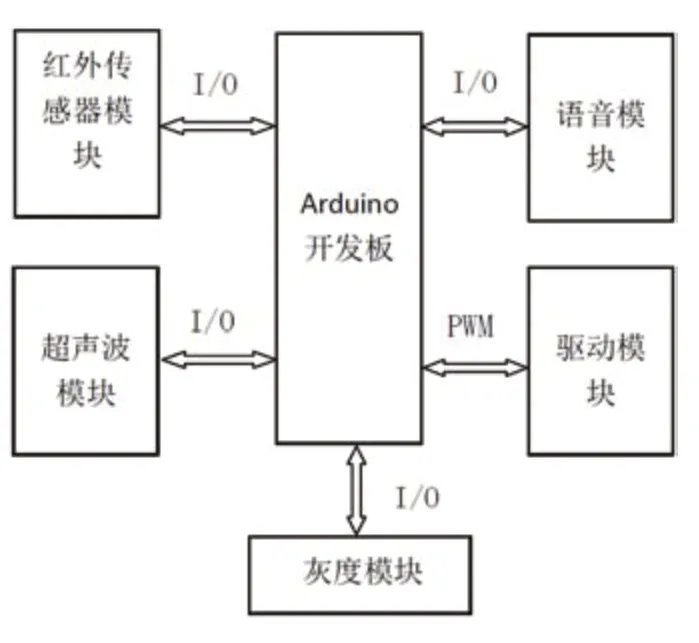
图1:系统总框图

图2:US-100超声波模块

图3:E18-D80NK模块

图4:灰度模块原理图
本文选择的语音交互模块为LD3320语音识别模块,其主控为51内核的单片机STC10L08XE。LD3320 是一颗基于非特定人语音识技术的语音识别/声控芯片。LD3320 芯片上集成了高精度的 A/D 和 D/A 接口,不再需要外接辅助的 Flash 和 RAM,即可以实现语音识别/声控/人机对话功能。并且,使用者根据自己的实际需要可以对关键词语列表进行动态编辑。其原理图如图5所示。
3.2 语音识别的实现
LD3320对语音识别和处理主要分为4个部分。首先对通过MIC输入的声音进行频谱分析,得到关于声音在频域上的分布数据,然后根据声音的频率特性提取语音的特征值,将所得到的特征值与关键词语列表中的关键词进行循环比对,将相似度最高的关键词作为识别的结果输出。
语音的模拟信号输入之后,通过处理过程,将其转化为数字信号,然后基于语音顿的方法开始获取语音特征值,从而可形成待匹配的语音模式。紧接着这些待匹配的语音数字信号便开始与系统中训练好的语音模板进行匹配,匹配结束之后,系统会将最接近的匹配结果反馈给使用者。
3.3 语音播报的实现
LD3320实现语音的播报主要通过读取MP3数据,无需外围辅助器件,主控 MCU 将 MP3 数据依次送入 LD3320 芯片内部就可以从芯片的相应 PIN 输出声音。可以选择从立体声的耳机或者单声道喇叭来获得声音输出。当LD3320通过麦克开始播报声音时,在循环里设置中断,即当满足MP3数据的最后一个数据读取完了或者当数据的长度满足了,则会向CUP申请中断,退出循环,完成一次语音播报。
3.4 语音交互系统的实现
通过单片机对LD3320的控制实现导盲机器人与使用者语音交互的功能。其流程框图如图6所示,当机器人识别到人声“前进”时,LD3320通过外接麦克播报“收到”,然后驱动电机前进。同时在机器人行进的过程中如果超声波或者红外传感器检测到有障碍物,并且反馈到CPU,CPU产生中断去执行语音播报的程序,机器人会提示使用者“前方有障碍物”。另外,当灰度传感器识别到红灯或绿灯时,CPU优先执行语音播报程序,提醒使用者是红灯还是绿灯,再执行驱动模块让小车停止前进或开始前进。在所有的触发条件中,识别到人声“停止”的优先级最高,无论导盲小车现在正在执行什么程序,当识别到“停止”后,都会优先执行此步骤,使电机停止驱动,导盲小车停止前进。
3.5 实验的成果
通过Arduino板将语音交互系统与超声波、红外、灰度等模块相结合,实现了基于语音交互的导盲机器人。不仅能通过声音与导盲小车交互从而控制小车的前进与停止,还将超声波模块与红外模块的避障功能通过语音交互系统播报出来,更智能的体现了导盲机器人与使用者的交流沟通。在以上实现的基础上,本文设计并制作以PVC板和铜柱为支撑结构,车身高27cm、宽18cm、探杆高40cm,能够使视觉障碍者的生活更加便捷的导盲机器人如图7所示。
4 结论
本文设计的导盲机器人具有以下特点:
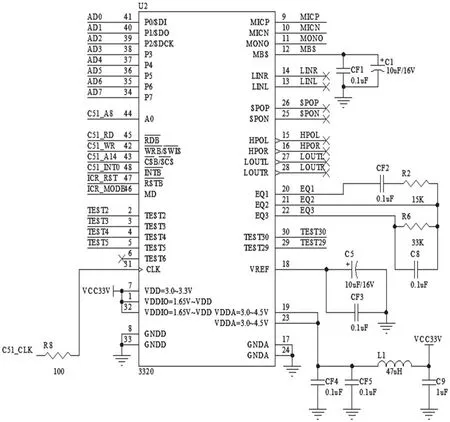
图5:LD3320原理图

图6:系统流程图

图7:导盲机器人实物图
(1)引导、避障与语音交互相结合,更智能化,并且可以应对复杂路况。
(2)相较于现有同类产品,具有成本低、易操作、易携带、功能更加完备等优点使得其更易拥有受众群体。
(3)细节体现更多人性化设计,机身添加荧光材料,在光线较暗时保护视觉障碍者安全。
除了已经实现的避障、颜色识别、语音交互等功能,还具有很大的发展前景。后续还可为机器人更换履带式车轮以实现爬梯功能;并采用GPS定位,增加导航功能等。
