基于Google Project Tango的盲人障碍检测系统设计与实现
2019-04-26胡浩明奚王雨牧李亚南史哲凡齐楚涵
文/胡浩明 奚王雨牧 李亚南 史哲凡 齐楚涵
1 引言
1.1 研究背景
视力的损失给盲人或者视力缺陷者的日常生活带来了极大的不方便与烦恼。根据世界健康组织2017的报告显示,世界上视力有缺陷者的数量约为2.53亿人。其中3600万人受到失明的困扰与折磨。基于如上的情况,解决盲人出行的导航相关问题显得意义重大。
调研显示,盲人白手杖,导盲犬以及人类照顾者是解决盲人出行问题的三大传统途径。然而,这三大传统途径都有自身不可避免的缺陷。盲人白手杖,需要使用者之前花费大量的时间和精力适应,才能较好使用。并且,白手杖的缺陷在于使用者探测距离有限,超过1-2m距离的障碍物使用者并不能识别到。尽管导航犬对于盲人来说非常合适,但一条合格的导盲犬需要密集的培训和专业的指导,费用大致在12000-20000美金之间,价格非常昂贵。且一条导航犬的有效使用期短暂,只有五年左右,期间需要细致的照顾。让一个中老年的盲人在日常生活中仔细照顾另一个生命是件非常困难的事情。这就是为什么导航犬在盲人中并不普遍的原因。人类照顾者不能够时刻陪伴在盲人左右,且大量盲人是独居的。因此,对于大量盲人来说,单独出行仍然存在很多困难,关键在于缺乏一个简单好用,价格低廉的盲人导航系统。

图1:基于Tango技术的Measure软件测量准确度实验-以iphone 8P手机为例
1.2 研究目的与方法
利用Google公司研发的Project Tango平台设计和实现一个盲人便于使用,准确度,可靠性高,价格相对低廉的盲人障碍物系统,使得盲人的出行问题得以改善。根据调查显示,盲人出行最大的困扰是无法及时准确识别盲人前进路径中的障碍物,从而经常受到物理伤害。因而导航系统中障碍物检测是关键功能。系统基于Project Tango平台,利用深度感知技术,对深度感知传感器接收到的点云数据进行处理,辨别出范围内的障碍物,在确定障碍物距离设备使用者的位置后,给出语音提示,从而让盲人避免受到行进路上的障碍物伤害。
2 相关工作
2.1 模型介绍

图2:基于Tango技术的Measure软件测量有效距离实验——以门为例
采用最近Google公司开发的project Tango为开发平台,该平台依托于移动设备,如移动手机,平板,装备功能强大的NVIDAIA Tegra K1 with 192 CUDA cores处理器,包含了运动追踪摄像头,三维深度感知器,环境光感知器,GPS等部件,以强大的硬件配置为依托,使得移动设备具备追踪使用者运动轨迹,学习记忆曾经扫描过的三维周围环境,通过点云技术测量实时物体之间的真实三维距离等。本系统以Project Tango平台下的深度感知技术为核心,通过编写程序调用移动设备上的深度感知摄像头和点云传感器,接收外界的点云数据,编写算法进行处理,辨认出障碍物以及障碍物距离使用者的位置,并由此给出相关的语音提示,从而让持有该设备的视力缺陷者可以及时避免路径上的障碍物,达到便于盲人出行的效果。
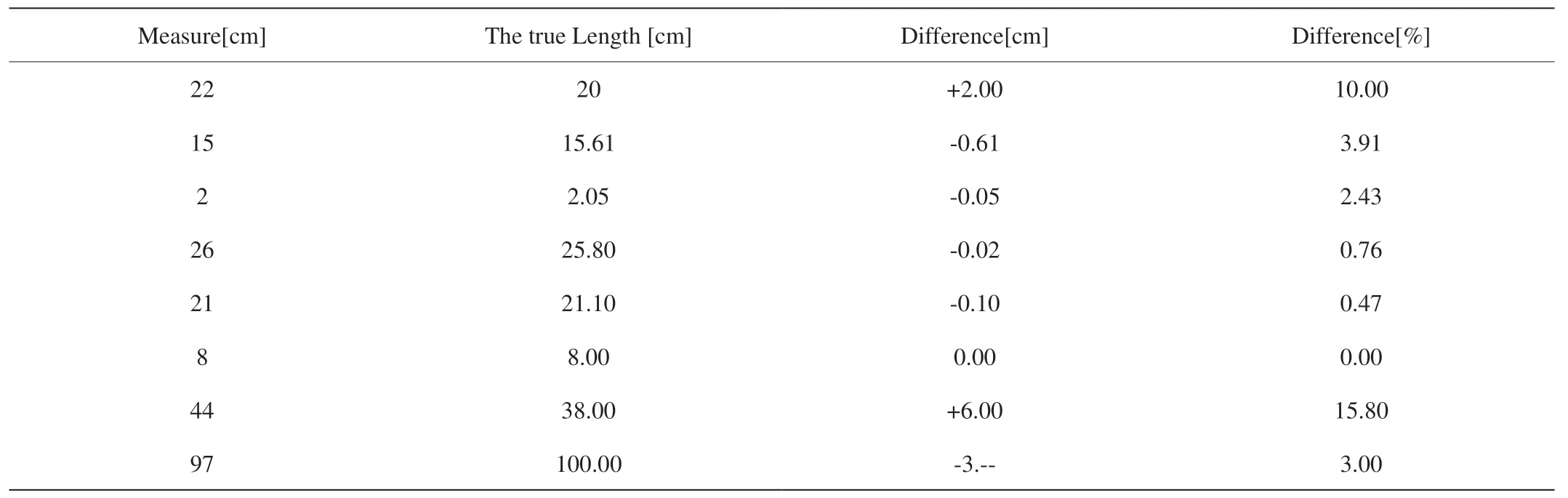
表1:Measure测量的实验结果,真实长度用标准刻度尺测量,大约有2-3mm误差

图3:点云技术示例展示
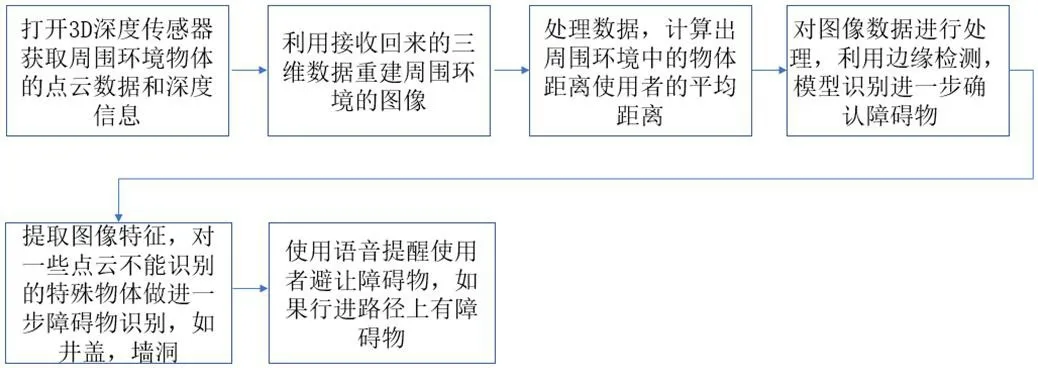
图4:障碍物检测导航系统的结构图
2.2 验证性实验
一些简单的应用测试软件已经在Tango商店里上架。其中一个利用深度感知技术,主要用于测量现实物体的距离,名为Measure的应用软件,启发了开发团队,并以此为基础开发出盲人障碍物监测系统,为了检测盲人障碍物检测系统获取三维空间距离以及深度感知数据的准确性,即评价盲人障碍物检测系统获取处理数据的准确性,我们做了如下验证系统准确性的实验。
图1显示用该应用测量标准大小的iphone8plus的长度时的情景,图1里认为是15.00cm,多次测量,取不同物体,与物体实际长度作比较,记录实验数据,分析误差。
图2是用Measure测量距离门的长度时的情景。图2里的红圈意味着被测量物体与搭载tango平台的移动设备的距离过远,以至于设备不能够获取关于该物体的深度信息。我们假设tango设备的深度传感器因为硬件和工作原理-(飞行光时间)的限制而有测量距离的限制,依据图2的情况多次测量,得到大量的实验数据,分析可以得出测量的极限距离大概是3.5m并且如果测量距离在0-2m之间将会便得更加准确。
这个实验结果表明measure测量结果与折尺测量结果的误差随周围环境光照条件而波动,从表1可以看出,很明显绝大部分的测量误差在物体真实长度的0%-5%之间。但是如果周围环境的光强强烈,测量误差将会变的更高。这解释了为什么表项中有两项的数据误差超过了10%。所以我们设计的障碍物检测系统必须在光强不是太高的环境中使用才能拥有较为准确的效果,并且可以将距离测量误差控制在5%之内。
2.3 原理与系统设计实现
图3是深度感知,点云技术的简单应用,我们在此基础上加以完善,从点云技术可以返回周围障碍物的平均距离以及深度感知器收集的点云数目出发,开发出盲人导航障碍物检测系统。
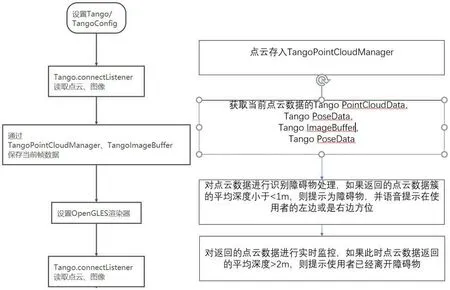
图5
图3右图是一张应用点云技术的日常生活场景照片。一个青年男子站在深度感知器前方,拿着包在手上。左边的图像就是调用深度感知器得到的点云数据合成的三维图像。因为点云技术,深度感知可以侦测到深度感知器周围的障碍物并返回相关点云数据数量和平均深度,所以可以以此为基础设计出盲人导航障碍物检测系统。图4展示了导航系统的结构。
2.4 技术方案
技术方案如图5所示。
3 结论
基于前面盲人出行解决方案的现状分析,发现传统的三大解决途径都有自身的局限性。比如导盲犬培训周期长,花费费用大,不普遍适用。而依托于便携式设备的盲人导航系统携带方便,可靠性高,是未来解决盲人导航出行问题的发展趋势。基于Google公司Project Tango平台开发出的障碍物检测导航系统,与同类的如微软的HoloLens相比,显得成本低廉,只需约360美元就可以买入使用。并且绝大多数现在的盲人导航仪对于环境的要求很高,需要良好的网络环境,需要环境里配置相应的传感器。而基于Project Tango开发的导航系统核心依托于Tango独特的硬件系统,如深度感知摄像头,运动追踪器。对于环境几乎没有硬性要求,只要移动设备正常工作,使用者就可以手持设备规避障碍物。且由前面的验证性实验可知Tango测量准确度高,在光照正常的情况下误差小于5%,准确度高于一般的导航仪。因而依托Project Tango设计出的盲人导航障碍物检测系统具有独特的优势,有广阔的应用价值。
