多影响因子下智能前照灯系统建模与仿真*
2019-04-23刘永斌刘珊中李金辉
刘永斌,刘珊中,李金辉
(1.河南科技大学信息工程学院,河南 洛阳 471023;2.河南科技大学车辆与交通工程学院,河南 洛阳 471023)
0 引言
传统的前照灯只能在近远光之间进行切换,配光方式简易且需要手动操作,在行车条件变化的状况下如雨雪天气、载重变化等,不能提供充分的夜间行车视野[1],无法保证行车安全。因此,各汽车制造商致力研究能够自动适应车辆行驶状态的智能前照灯系统(AFS)以满足汽车安全性能的需要。AFS系统通过传感器接收车辆行驶状态、路况等信息,控制前照灯实时调整,以保证环境条件变化后的行车视野,提高汽车的安全性与驾驶的舒适性。
前照灯系统[2-3]的研究在国外已经取得了阶段性进展,如欧洲VARILIS专利系统和美国伟世通公司结合GPS定位系统的AFS系统较为先进。国内对AFS系统的研究更侧重于处理复杂的道路行车模型与优化控制算法。左萃[4]通过实际行车制动的经验数据,对车速和制动距离进行最小二乘曲线拟合得到制动距离与车速的关系,建立前照灯智能调节模型,并设计模糊控制器对AFS系统进行了仿真研究。王洪佩在汽车二自由度模型基础上,结合步进电机模型等建立了AFS数学模型,模型更加接近实际,但均没有融入更多方面的影响因素。
本文针对前照灯系统照明调节偏角受车辆动力系统、驾驶员经验以及路面状况等多因素影响的问题,建立可以适应路面湿滑状态以及车辆载重变化的智能前大灯偏转模型,并设计模糊PID控制器对其控制性能进行优化,以增加AFS系统的控制精度并延长汽车前大灯的使用寿命[5]。
1 安全制动距离的计算
智能前照灯的调节是以车辆安全制动为基础,对安全制动距离的影响因素进行分析。驾驶员在接受了紧急制动信号后,车速V随制动时间t的变化关系曲线如图1所示:
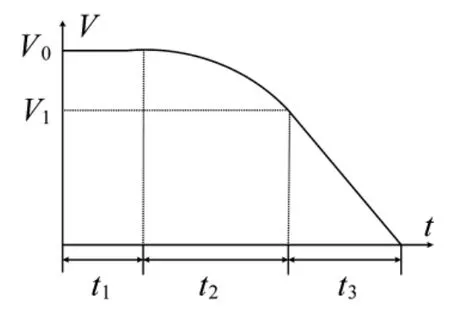
图1 车速V随制动时间t的变化关系曲线
车辆分别在t(1制动延时时间)、t(2制动力增长时间)、t(3持续制动时间)在内行驶距离S1、S2、S3的总和为制动距离S[6-8]。刹车前汽车以速度V0运动,汽车的最大减速度为amax,则:

在t2时间内,将汽车减速度的变化简化为线性增长过程,即:
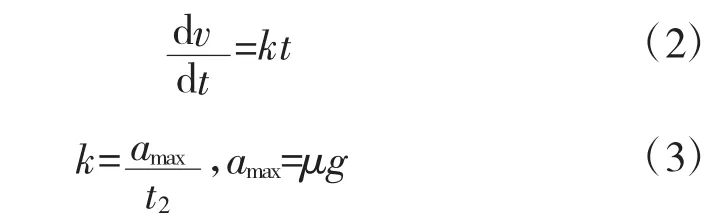
其中,k为平均减速度系数,g为重力加速度,μ为路面附着系数。

其中,V1为汽车达到最大减速度amax时的速度。
求解积分可得:

汽车在t3时间内,初速度为V1,末速度为0,汽车完全制动,故:
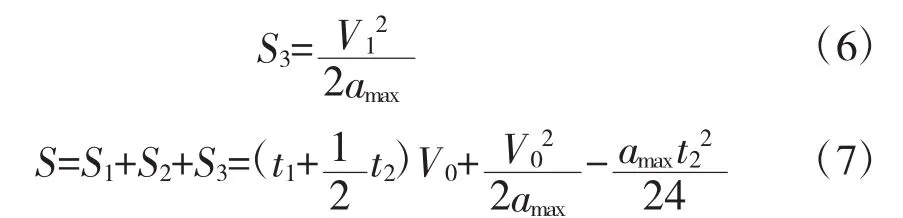
实际制动过程当中,驾驶员反应延迟时间一般近似为1 s,车辆的减速度增长时间t2一般为0.2 s左右,汽车的最大减速度amax小于10 m/s2,因此,t2的平方项忽略,则汽车的制动距离:

由式(8)可以看出,车辆安全制动距离受刹车前速度以及路面附着系数影响。
2 前照灯智能调节模型
2.1 前照灯水平调节模型
内侧车灯偏转角度为θ,转弯半径为R,车辆转弯时,将最小弯道照明距离S作为相应车速时的安全制动距离。三者之间的关系如图2所示:

图2 安全制动距离、内侧车灯偏角与转弯半径关系
由图2可得
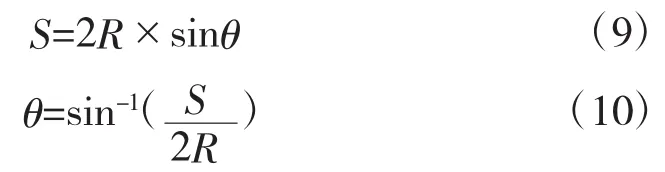
式(10)可以看出较小的转弯半径会导致较大的车灯偏角,进而增加机械负担。有研究表明,车灯光束中心到车辆转弯内侧大灯的光束散射边界线1/2位置可以作为有效照明范围,既满足照明要求又考虑保证系统工作寿命的情况下,可以修正将偏转角减去 10°[9],即:

由式(11)可以看出前照灯水平调节受转弯半径与安全制动距离共同影响。有研究得出转弯半径与车辆系统的相关性:

其中,

式(13)中,δ为前轮偏转角,m为车辆与载重质量之和,a、b分别是质心到前、后轮轴心的距离,L为车辆轴距,k1、k2分别是前后轮侧偏刚度。
由式(13)可以看出转弯半径受前轮偏转角、车辆与载重质量之和、质心到前、后轮轴心的距离、前后轮侧偏刚度以及车辆速度影响。
2.2 前大灯垂直调节模型
按照GB4599-94标准[10],车辆在正常车况下前照灯垂直角度的配置调整,如图3所示。汽车前照灯O点与配光屏的距离为25 m,B点为明暗截止点,C为对方车辆驾驶员眼睛点,A为配光屏坐标轴中心点,B点与C点都位于距离A中心点25 cm处,光线OC与水平线的夹角为α,光线OB与水平线的夹角为β。

图3 垂直方向配光图
由图3几何关系可得:

即前照灯垂直方向上下调整角度上限为0.6°,当车灯向下偏转0.6°时,可满足正常车况下行车的视野需要[11]。当车辆载重增加时,车前照灯距离地面的高度h会随之增高,为保证原有的安全的视野,因此,前照灯垂直方向偏转角需要向上偏转,如图4所示:
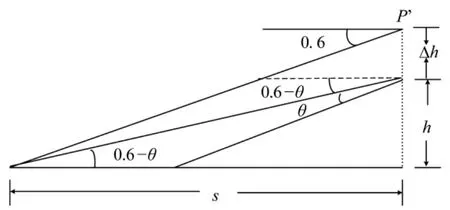
图4 垂直方向调节示意图
由图4几何关系可得:

由式(15)可以看出前照灯垂直调节受车身高度以及安全制动距离影响。
2.3 模型仿真与分析
综合以上对于影响前照灯偏转调节的多种因素的分析,结合步进电机的数学模型并设定参数模拟路况进行仿真。其中步进电机的数学模型为:
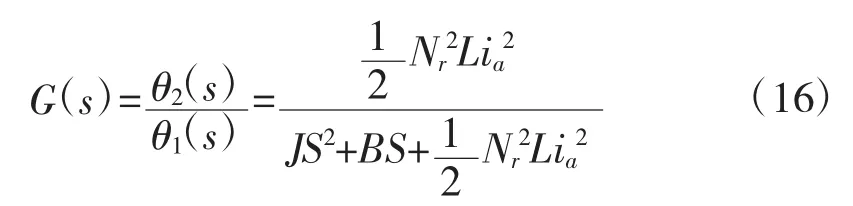
式(16)中,理论步进电机转动角θ1为输入,实际转角θ2为输出,Ia为A相的电流;L为绕组电感;J为转动惯量;B为粘滞阻尼系数;Nr为转子齿数。
2.3.1 垂直方向测试与仿真
设定车辆为定速巡航状态(80 km/h),以路面附着系数的变化模拟雨雪天气变化,以车身高度变化模拟车辆载重变化。模拟行驶路况变化为干燥混凝土路面到潮湿混凝土路面到开始下雨路面到雨水蒸发后路面最后到干燥路面,设定路面附着系数变化为 0 s~2 s内 0.7,2 s~4 s内 0.4,4 s~6 s内 0.3,6 s~8 s内 0.5,8 s~10 s内 0.6;设定在 6 s时车辆载重加大,车灯距离地面高度由0.67 m降至0.5 m。
前照灯垂直方向偏角调节变化如图5所示:

图5 前照灯垂直方向理论与实际偏角
2.3.2 水平方向测试与仿真
设定转弯车速为20 km/h,前轮转角为10°,路面附着系数为0.7到0.5变化。前照灯水平方向内侧偏角调节变化如图6所示:

图6 前照灯水平方向理论与实际偏角
由图5和图6可知,前照灯偏转调节的实际值相比于理论值超调过大,影响调节精度和系统使用寿命,需优化控制。
3 模糊PID算法实现
选取前照灯理论转角与实际转角的偏差e与偏差变化率ec作为控制器的输入,经模糊推理后的解模糊输出 PID 参数的增量分别为 ΔKp、ΔKi、ΔKd,各量的模糊集合均为{NB,NM,NS,ZO,PS,PM,PB},车灯转角偏差论域为[-3,+3],转角偏差变化率的论域为[-3,+3],ΔKp的论域为[-3,+3],ΔKi的论域为[-0.6,+0.6],ΔKd的论域为[-1.5,+1.5]。
误差和误差变化率的隶属度函数采用高斯函数,ΔKp、ΔKi、ΔKd的隶属度函数采用分辨率极强的三角形分布的隶属函数。模糊控制规则如表1所示。
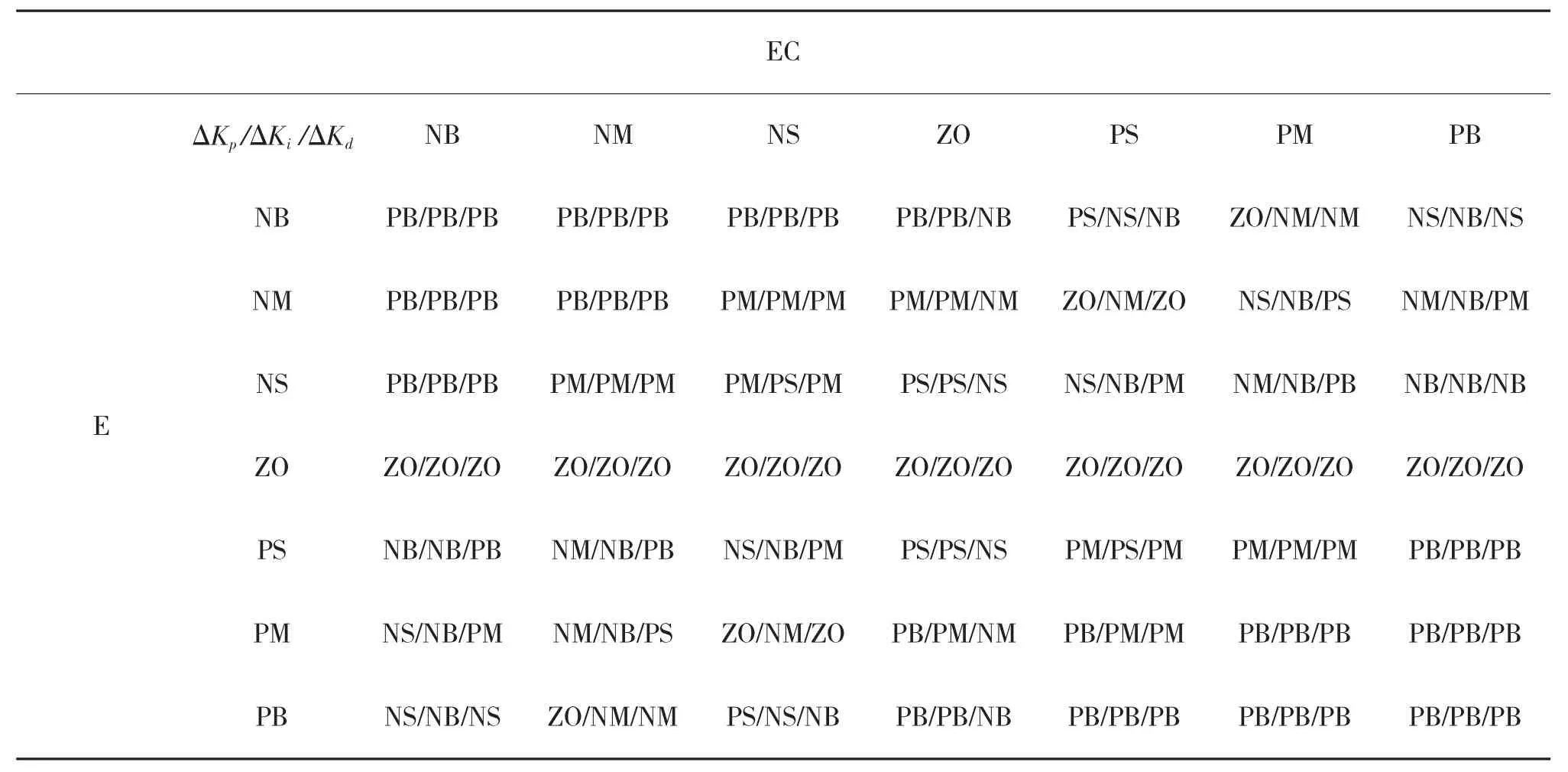
表1 模糊控制规则
4 控制仿真研究结果
构造AFS闭环控制系统对其控制性能进行仿真研究,系统结构图如图7所示。

图7 AFS控制系统结构图

图8 AFS垂直方向偏角
由图8和图9可以看出,AFS系统加入模糊PID控制器后,车灯偏转调节存在的尖峰问题得到了良好的解决,这有利于提高系统的控制精度,延长系统使用寿命。

图9 AFS水平方向偏角
5 结论
引入路面附着系数模拟雨雪天气道路湿滑的路面状况,引入车身高度变化量模拟车辆载重变化。通过对直线与转弯两种路段的理论与仿真分析,得到如下结论:
1)针对湿滑路面以及车载变化条件下前照灯调节的需要,实现了前照灯光轴水平与垂直方向的智能调节功能。
2)加入模糊PID控制策略后的AFS系统,能够大大减少系统超调,增加系统的控制精度,延长系统使用寿命,使AFS系统性能得到优化。
