关于高压线路巡线机器人的研究设计
2019-04-22周柱昌
朱 岩,周柱昌,高 峰
(广西玉柴机器股份有限公司,广西 玉林537005)
0 前言
电力系统最重要的任务是提供高质量和高可靠性的电力。电力传输必须依靠高压输电线路,它的安全稳定运行直接影响着电力系统的可靠性[1]。然而高压输电线路分布复杂,范围广阔,且暴露在野外,环境多变性大,日日夜夜的都要遭受风吹日晒,高压线路表面的材料容易氧化、老化以及磨损,而且无论南北方都会出现雨雪天气,特别是南方的冻雨,在落下的时候是雨滴,落到高压线上的时候就变成了冰块挂在高压线上,这更是大大增加了高压线路的负担。因此,必须定期检查传输线,而高压线巡线机器人也就成为了一种保障高压线路安全的重要手段。
1 高压线路巡线机器人国内外研究现状
巡线机器人研究始于80年代末,1988年到1990年属于萌芽期,1990年到1995年为起步期,1996年到2010年为发展期,2011年至今已发展成熟,成为特种机器人的研究热点。
对于高压线路巡线机器人的研究,国外已经开始进入实用阶段,而且已经可以实现很大程度的人工智能,所需花费的人力资源已经大大减少,国内虽然还不能正式投入实用,但是也都在很多领域实现了突破,并且国内也对能够实现自助越障功能的机器人的研究进行了大量的投入,取得了多项显著的研究成果。
2 主要研究内容
目前在国内高压输电线路的巡检、维护主要有两种方法:一种是人工检查,其缺陷有人工劳动强度大、工作效率低、可靠性差、存在检查的盲区;另一种是用直升机巡检,具有检测效率高和精度好特点,但也受一些环境因素的制约,同时不仅增加了巡检的技术难度,还将大大增加巡检的费用。所以急需一种可以替代之的工作方式。移动机器人技术的发展为高压输电线的检查工作提供了新的手段。
3 高压线路巡线机器人工作环境分析
由于巡线机器人工作的环境为室外高空旷野,自然环境例如烈日、大雨、狂风、暴雪等自然恶劣环境也有可能成为其工作环境,所以巡线机器人必须要能够克服这些环境才能进一步的进行其他的工作,因此要求巡线机器人必须要防水且不怕暴晒,且能保证高空中的稳定性,随时根据外界环境调整不同的状态加以应付。
其次,巡线机器人工作过程中需要经过导线、绝缘子以及悬挂线夹等不同的障碍物,这就要求其能根据障碍物的不同,做出不同的越障动作功能,而这仅是在高压线路上的时候的动作,在每两条高压线路之间还有一座铁塔连接着这两条高压线路。
4 巡线机器人总体设计
因为巡线机器人属于高空作业,考虑到机构稳定性,采取了双线并联四轮四臂行进式机器人。机器人关于中间丝杠相对称,并且相隔的两个滚轮位于同一条线上。其中两个电机分别与一号和三号滚轮相连,负责带动巡线机器人在高压线路上平缓前进;剩下的一个电机则与丝杠通过联轴器连接在一起,带动丝杠转动以改变丝杠上丝母的上下位置,进而决定滚轮是离开高压线路还是压紧高压线路,从而实现不同的越障阶段。为了增加机器人的稳定性,在丝杠四周增加了一个不影响机械臂转动的框。为了减少机构的运动副,设计的两边的机械臂采用了加长臂的方法。四个滚轮则统一加上了轮子盖以便与机械臂连在一起,中间的两个机械臂直接焊接在中间连接板上的方法,以使巡线机器人的整体受力能更趋于均匀。
其总装配图如图1所示。
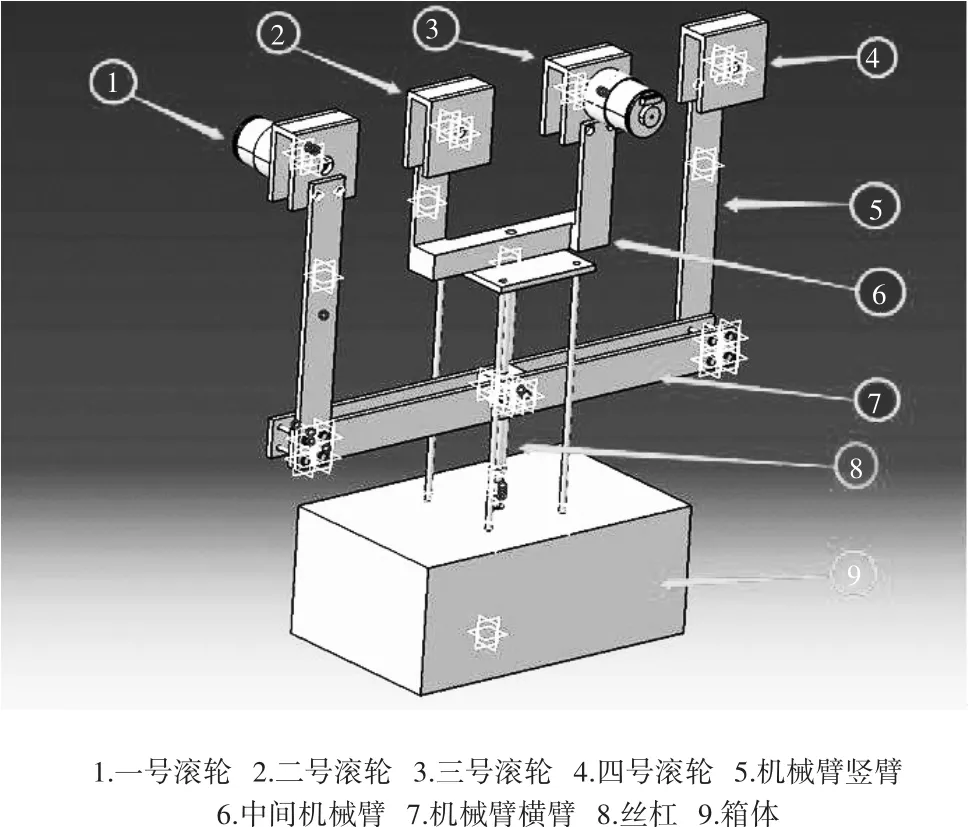
图1 巡线机器人总装配图
5 巡线机器人运动可行性分析
机器人的运动范围为机械臂在空间或平面内可到达的区域范围,由于跨越某些障碍时对运动范围有所限制,所以机械臂的上下运动幅度为300 mm,且只有与Z轴平行的一个自由度,在达到运动极点的时候,电机将进行空转,即机械臂与丝杠将会实现同步移动,从而不会发生位置的偏置,这样也从侧面实现了对巡线机器人的过运行的线路保护。根据实体与模型1∶5的比例,铁塔最小的三角结构最小容纳直径为3 m的运动范围,巡线机器人完全可以从容的越过障碍,所以,设计的机器人大小是合理的。
6 巡线机器人越障过程
在翻越悬垂线夹一类需要用到舵机的障碍物时,要做到机械臂的位置改变。详细越障过程如下所述:
首先,丝杠电机正转,一号、四号机械臂上升一定高度,舵机正向转动90°,如图2所示。
然后,滚轮电机正转,带动巡线机器人向前移动,一号机械臂越过悬垂线夹后滚轮电机停止,舵机反向转动90°,丝杠电机反转,一号和四号机械臂回到高压线上,如图3所示。

图3 一号滚轮越过障碍物
紧接着,丝杠电机反转,二号和三号机械臂离开高压线上升到一定高度,舵机正转90°,机械臂偏移,滚轮电机开始正转,带动机器人继续向前运动,如图4所示。

图4 二号、三号滚轮开始越障
二号和三号机械臂越过障碍物后舵机反向转动90°,使二号、三号机械臂回到原来位置,然后丝杠电机正转,二号、三号滚轮回到高压线上,如图5所示。
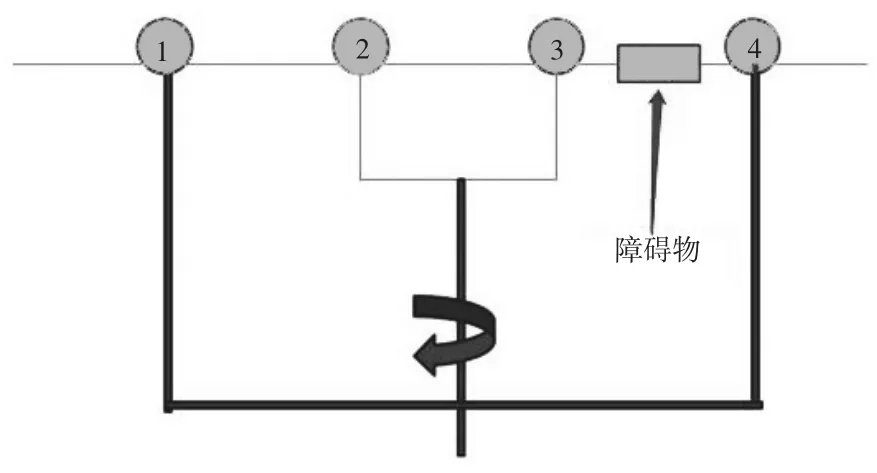
图5 二号三号滚轮越过障碍物
最后,丝杠电机持续正转,一号和四号滚轮再次离开高压线,上升到一定高度,舵机转动90°,机械臂再次偏移,然后滚轮电机转动,在四号滚轮越过障碍物后停止,如图6所示。
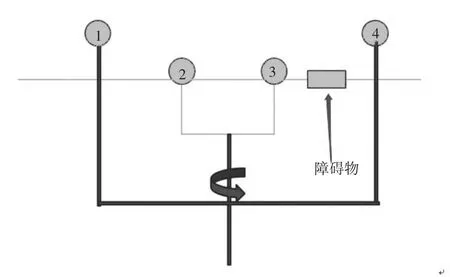
图6 四号滚轮开始越障
舵机反向转动90°,丝杠电机反转,一号和四号机械臂回到高压线上,如图7所示,越障动作完成。
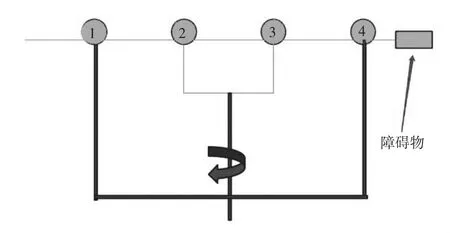
图7 四号滚轮越障结束
7 巡线机器人程序仿真
因为装配的时候必然存在误差,所以,为了最真实的还原零误差时机器人的运行状态,通过protues仿真软件进行了巡线机器人的运动仿真(见图8)。仿真图中,共使用了四个arduino模块以及三个放大器模块,其中一个arduino模块控制另外三个arduino模块,这三个模块连接三个放大器输出放大的功率给直流电机,直流电机的运行情况通过连接在电机两侧的电压表显示。
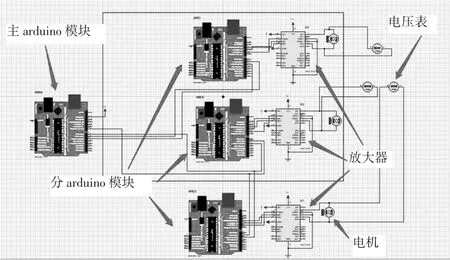
图8 巡线机器人protues仿真
8 结论
本次研究设计中,由于一切都只是理论基础,所以我们设计了一个实验模型以验证结论,但是在实验时发现,实验巡线机器人的丝杠由于滑块需要上下滑动,所以需要裸露在空气中,一段时间之后会与空气发生氧化,从而影响巡线机器人的使用寿命,目前还没有比较好的解决方法,欢迎广大研究学者在此基础上继续改进、深入研究。