自动扶梯清洁问题和解决对策分析
2019-04-20于振坤金新锋刘富海周淦简宏伟严乐乐
于振坤,金新锋,刘富海,周淦,简宏伟,严乐乐
(杭州职业技术学院,浙江 杭州 310018)
自动扶梯的大规模使用给人们的日常生活和出行带来极大便利,但是自动扶梯的清洁问题一直受到广泛关注,而我国主要还是依赖人工的清洁维护。人工清洁维护不仅费时费力、清扫效果差,而且风险性极高。而采用物联网控制相关技术,建立自动扶梯的清洁系统,是目前一种行之有效的方式。
1 自动扶梯清洁现状
由于自动扶梯数量急剧增加,维保人员极度匮乏。传统自动扶梯梯级清理为全部拆卸后用铲子、刷子去清扫扶梯,耗时耗力,而且清洁时存在安全隐患。例如,上海“梦之龙商场自动扶梯清洁人员被扶梯夹腿”事故,即为每次清理时需要将全部桁架以上的梯级进行拆除,再到桁架内部进行清理,不但效率低且存在安全隐患。维保清洁精力投入不足,异物积累增加扶梯故障率,运行风险突显。本系统为针对扶梯的桁架、梯级平面、梯级弧面做出自动清扫装置,可以提高维保效率,保证扶梯传动清洁,降低扶梯运行故障及事故风险。
2 物联网技术自动扶梯清洁装置的优势和特点
物联网辅助的自动扶梯智能清洁装置具有结构简单、功能丰富、使用方便等特点。可以采用智能自动控制,APP物联网远程监控,手动控制三种控制模式,适用于现行使用的所有自动扶梯。
首先,可以使用智能自动控制。通过单片机控制,依靠单片机中的程序,当某个红外对传感器到达超过设定值的20%时,会自动进行扶梯的清洁工作,对扶梯弧面以及扶梯踏板进行清洁。其次,可以使用APP物联网远程监控:当红外对射传感器到达设定值时,会对维保员工的手机或者电脑发出信号,当信号传递过来时会发出类似于手机来电的震动以及铃声提醒。维保员工即可对装置进行远程监控清洁,也可通过手机APP来查看扶梯中出现的问题以及对扶梯出现的问题进行分析和解决。最后,可以使用手动控制。在扶梯需要月检或者年检时,需要对桁架内部进行清洁。这时就要进行手动控制将装置运行并且对桁架内部进行清洁。所以需要拆卸一个梯级,将桁架内部清洁装置装进桁架内部,通过盘车或者检修上下行来进行对桁架的清洁[2]。
3 物联网技术自动扶梯清洁装置的关键技术
(1)自动智能控制技术。在桁架底部均匀布置多处红外对射传感器,将红外对射传感器采集到的数据进行数据处理和发送,即通过物联网模块将设备编号以及灰尘的厚度的相关信息上传到服务器,维保员工可以通过手机APP或者网页查看自己负责的每台设备的相关信息,主控制器和手机移动终端进行数据处理,即和标准数据(提前做好标定的数据)进行对比分析,当数据超过一定的阈值,手机像来电一样进行报警,同时窗口弹出需要处理自动扶梯编号及位置信息。反馈到控制终端,终端再发出指令控制各部件的运动,以实现智能化的自动清洁的功能。嵌入式控制系统对灰尘程度以及油污程度实时上传的数据进行分析和向各个运动部件发出动作指令,并实现各运动部件之间的协调。
(2)物联网控制技术。利用先进的计算机技术、网络通讯技术,无线局域网技术,传感器技术等,在自动扶梯智能清洁装置上加入远程控制、监控功能,可通过APP软件查看当前和历史状态,并可控制装置实现清洁以及去除油污等功能。即:远程控制软件的代码编写;物联网系统的搭建;数据采集加密上传;控制信号传输;执行机构动作方式[4]。
(3)传感器技术。主要为红外线对射传感器的使用。作为收集数据的一个重要途径。通过红外线发射端到达信号接收端的完整率,以反馈至主控制器进行处理。即传感器灵敏度的调节和传感器的最佳位置[3]。
4 物联网技术的自动扶梯清洁的基本原理
(1)梯级弧面清洁。装置由电机、开关触发面、电磁锁、伸缩杆、毛刷、PU橡胶轮等以及相应的电控单元组成。当扶梯梯级向下运动时,电机控制电路接通,电磁锁接通,锁舌收回,电机旋转,带动四根钢丝绳以及弹簧释放压缩能,同时将梯级弧面清扫装置放下,电机停止。毛刷部分采用多段式合页连接,可以使弧形毛刷刚好与梯级弧面部分相贴合,以便更加全面高效的清洁梯级弧面。装置下面安装有PU橡胶轮,在梯级的运动过程中为装置提供了一个运动的力,而由于伸缩杆和弹簧组成的套筒,为装置固定了向上的运动方向。因此梯级运动带动了装置朝上运动。当装置处于初始位置,在释放能量复位这一过程中,装置开始对梯级弧面进行第一次清扫。当扶梯下行时,返回侧梯级向上运动梯级弧面带动装置做向上运动,与此同时毛刷开始向上清理梯级弧面梳齿灰尘污物。当该梯级通过后,在弹簧以及装置的重力影响下,装置回弹至初始位置的过程中,毛刷开始清扫下一个梯级弧面,当装置被向上顶起时,进行二次清扫动作。以此往复,当电梯停止或上行运动时,电机反转,电磁锁锁舌释放,装置回收过程中,先是锁舌将伸缩杆卡住锁死,防止装置下落造成安全隐患。当毛刷支架连接板碰到行程开关触发面打掉开关,电机停止旋转。如图1所示,自动扶梯清洁设备的结构原理。
(2)梯级面清洁。主要采用滚筒的设计理念,滚筒周围为长毛刷,安装在下机舱盖板处。将固定座底部增设竖向弹簧伸缩装置,在弹性伸缩装置前部且向下方向的机体内梯级为清洁结构,清洁结构的清洁部分被固定在弹性伸缩装置上并与踢板相配合接触,由于梯级的运行动作,踢板带动清洁部分向上方移动,完成踢板外部表面的清洁。当一个梯级移动过后,清洁部分被弹性伸缩装置拉回,完成与下一个梯级的配合接触,反复动作实现了对所有梯级的清洁。
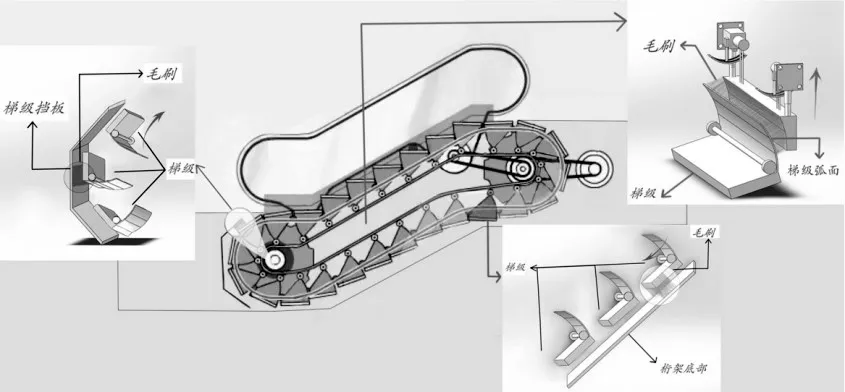
图1 自动扶梯清洁设备的结构原理
(3)桁架底部清洁。设计一个类似于梯级的装置,可以代替梯级安装在梯级轨道上,装置底部为长毛刷,可以刷到桁架底部。桁架脚踢踏板的清洁部分主要由转轴与滚筒组成。滚筒部分有滚筒部分与滚筒部分附带的毛刷机构,滚筒部分被固定在转轴上方,转轴左右两端转动配合在弹性伸缩装置上。清洁部分使用滚动清洁的模式,滚筒被固定在转轴上并且和踢板外部表面相接触,扶梯的梯级的运行带动滚筒向上方移动,滚筒向上方移动的过程中同时滚动,完成对踢板的清洁。滚筒的左右两端还配备有轮盘,轮盘被固定在转轴上,轮盘的面积介于滚筒的截面积和滚筒部分截面积之间,在滚筒左右两端的轮盘减少了踢板带动滚筒上移过程中的阻力,从而使得清洁部分的运行更为流畅。而踢板和滚筒配合接触时,踢板将毛刷进行压缩直至和轮盘完成配合接触,再由轮盘完成对滚筒的带动,进而实现扶梯的自动清洁[4]。
5 结 语
综上所述,合理且科学的应用物联网技术,控制并建立扶梯自动清洁的模式,可降低人工成本,提升维保效率,保障公共安全,是当下广泛使用自动扶梯的理想型清洁保养设备。
