岸电同步逆变器电压控制
2019-04-19田金虎张欢仁
田金虎, 张欢仁
(上海船舶运输科学研究所, 上海 200135)
0 引 言
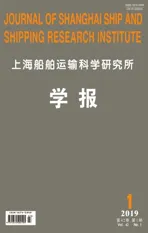
随着经济的不断发展,国际航运交流日益频繁,越来越多的国外船舶停靠在我国港口进行中转、卸载和维修等,对岸电设备的要求日益提高。岸电是船舶靠港期间使用的陆地电网电源,可用来替换船舶同步发电机提供的电源,起到节约能源、减少污染物排放和降低噪声等作用。图1为岸电系统结构图,由船端和岸侧2部分组成。该系统的组件大致分为船载供电系统、电缆连接设备和岸基供电系统等3部分,其中:船载供电系统包括电气管理系统和变压器等;电缆连接设备指连接岸上电源点与船舶用电装置的电缆和设备;岸基供电系统包括变频器和变压器,由陆地电网向船舶提供所需电能。本文主要研究岸基供电系统内变频器的控制策略。
国外船舶多采用60 Hz的供电电源,为满足各类型船舶的兼容性需求,有必要对50~60 Hz变频器进行研究[1]。与传统的电机组变频相比,绝缘栅双极型晶体管(Insulated Gate Bipolar Transistor, IGBT)电力电子技术变频具有稳定性强、噪声小和电气性能高等特点[1-2]。在岸电实际并车过程中,通过对岸电电源进行控制,达到并车的目的;船舶负荷完全转移到岸电电源上之后,整个系统达到稳定状态,并车控制策略不再适于对系统进行控制[3]。此时需切换控制策略来维持整个系统的稳定,即由并车电源控制策略切换到稳定的电压内环控制策略。本文根据60 Hz/440 V/800 kV·A变频电源的需求进行电压内环设计。
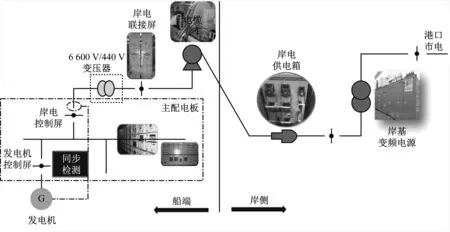
图1 岸电系统结构图
1 内环控制策略概述
逆变器系统包括三桥逆变、LC滤波、隔离变压器、电压变换、PI控制和船舶负载等6部分,模型框图见图2。分析整个系统的结构,对由脉冲宽度调制(Pulse Width Modulation, PWM)得到的直流电进行处理之后得到较为平滑的直流电,经过三相全桥控逆变装置,由正弦脉宽调制(Sinusoidal PWM)调制得到脉宽调制交流波。由LC滤波电路对逆变器输出的脉宽调制波进行滤波之后得到60 Hz的正弦波交流电。LC滤波器的主要作用是输出正弦波,解决PWM波带来的冲击电压过高的问题,可作为隔离变压器的理想输入,通过合理选择LC滤波器的截止频率,有效控制电压波形输出的总谐波失真度(Total Harmonic Distortion, THD)[4]。隔离变压器的主要作用是进行岸电与船舶的电气隔离,有效减小高次谐波和共模电压[5],减小船舶交流电机启动时对岸电的冲击电流,经过隔离变压器得到所需的电压值。整个系统对隔离变压器的输出进行电压反馈,经过电压变换之后,与给定的电压相比较,对得到的差值进行PI调节,通过改变调制信号得到所需的理想电压。在电压变换环节添加锁相环,进行锁相计算[6]。与传统的电压补偿相比,这种电压调节方式具有更快的调节速度和更高的准确度。
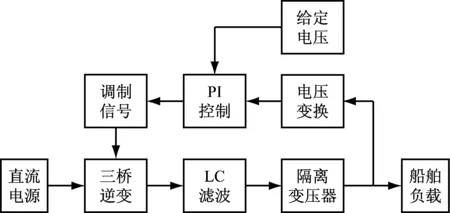
图2 逆变器系统模型框图
主电路结构见图3。根据已知的电压数据(逆变器输出端和变压器输出端)对变频器的逆变器输出进行估算,明确各种符号和数据的意义。根据变频岸电电源配套设备技术协议的要求,需设计800 kV·A的变频容量,可提供的最大船用负载为800 kV·A,额定电压为440 V,输出功率因数为0.85。根据这些数据得到变频器逆变部分的输出容量SVSD满足
(1)
式(1)中:SN为最大船用负载容量,取800 kV·A;cosφlaod为负载功率因数,取0.85;ηT2为输出变压器的效率,取0.98;ηLC为LC滤波器的效率,取0.98;U0为岸电空载输出电压,取480 V。
由式(1)得到SVSD≥877 kV·A,变频器逆变输出环节的额定电压为690 V,其基波幅值一般控制为额定输出幅值的0.95,即有效输出电压为660 V。对于三相系统,逆变器的额定输出电流大致确定为767 A,即

图3 主电路结构
(2)
2 参数设计
2.1 LC滤波器参数整定
图4 RLC低通滤波器示意
在设计LC滤波器时,主要考虑截止频率、电感和电容等3个参数。设计中采用的LC滤波器实际上是RLC(Radio Link Control)二阶低通滤波器(见图4),当电阻R=0时即可得到所需的LC滤波器。在选取截止频率时,根据文献[7]的描述,其值应小于载波频率的1/3。若系统中的载波频率为2 kHz,则应选取的截止频率为667 Hz。根据文献[8]对谐波原理的分析,为避开第11次谐波和第13次谐波,实际上可取截止频率为720 Hz,该截止频率也满足系统的设计需求,THD控制在3%以内[8]。

2.2 电压变换设计
由图2中的隔离变压器得到三相标幺值电压,对其作同步旋转坐标变换之后进行相关计算。由三相到两相静止坐标系的变换矩阵为
(3)
由两相静止坐标系到旋转坐标系的变换矩阵为
(4)
式(4)中的系数矩阵由锁相环得到。在整个系统中加入三相锁相环,得到一个相位误差反馈系统。岸电电源使用的是电力电子装置,要实时监测相位,保持相位同步。系统内三相锁相环的基本功能是维持三相电网电压的正序分量的相位。在仿真设计中使用Discrete Virtual PLL模块[10],与传统的三相PLL提供的闭环策略不同,Discrete Virtual PLL提供初始的相位和既定的频率,输出得到一个稳定的sin值和cos值,根据式(4)中的系数矩阵达到稳定相位和频率的目的。三相锁相环结构见图5,频率设定为60 Hz,初始相设置为1。
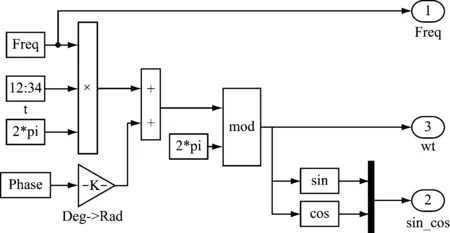
图5 三相锁相环结构
2.3 电压控制
在电压控制设计中对电压变换的输出进行控制,对得到的控制载波进行PWM调制得到控制信号。为有效解决比例控制中的稳态误差问题,同时避免采用过大的控制器增益,引入积分动作。积分动作的特点是低频增益很大,稳态增益可为无穷大,可用来消除稳态误差,经典的PI控制可满足要求。kp和ki分别为比例系数、积分系数,在对控制式子进行离散化处理之后,加入限幅环节得到整个模型。使用Z-N整定进行参数整定[11]。
2.4 隔离变压器参数整定

继续计算分析隔离变压器的容量SN等电气参数,隔离变压器的电流波形系数K取为4[12]。
(5)
式(5)中:Uload/UN为满载二次侧电压与空载二次侧电压的比值,取0.9;PN为额定功率,取680 kW;D为非整流变压器的减额系数,本文采用系数为4的K级整流变压器,D=1。由此可得隔离变压器的容量SN≥889 kV·A。
在设计过程中,需注意隔离变压器的励磁回路相当于一个电感LT,通过以上分析得到隔离变压器的容量为889 kV·A,变压比为615 V/460 V,空载额定电流I20一般为额定电流的0.3%(2.31 A),有
(6)
3 仿真模型
根据上述参数整定建立仿真模型,得到LC滤波器模型见图6,电压变换模型见图7,控制器离散化模型见图8。对整个系统进行整合封装,在powergui环境下进行仿真,设置合理的直流电源,经过measure环节获取输出电压的标幺值,进行标幺值处理,对得到的反馈电压进行电压变换和控制处理,将处理得到的电压变换为三相电压,得到理想的SPWM波形。综合上述各系统进行子系统封装,建立完善的系统仿真模型(见图9)。
4 仿真负载试验验证
整个系统的设计是在60 Hz/440 V/800 kV·A负载条件下进行的,对该系统进行添加负载试验验证。

图6 LC滤波器模型
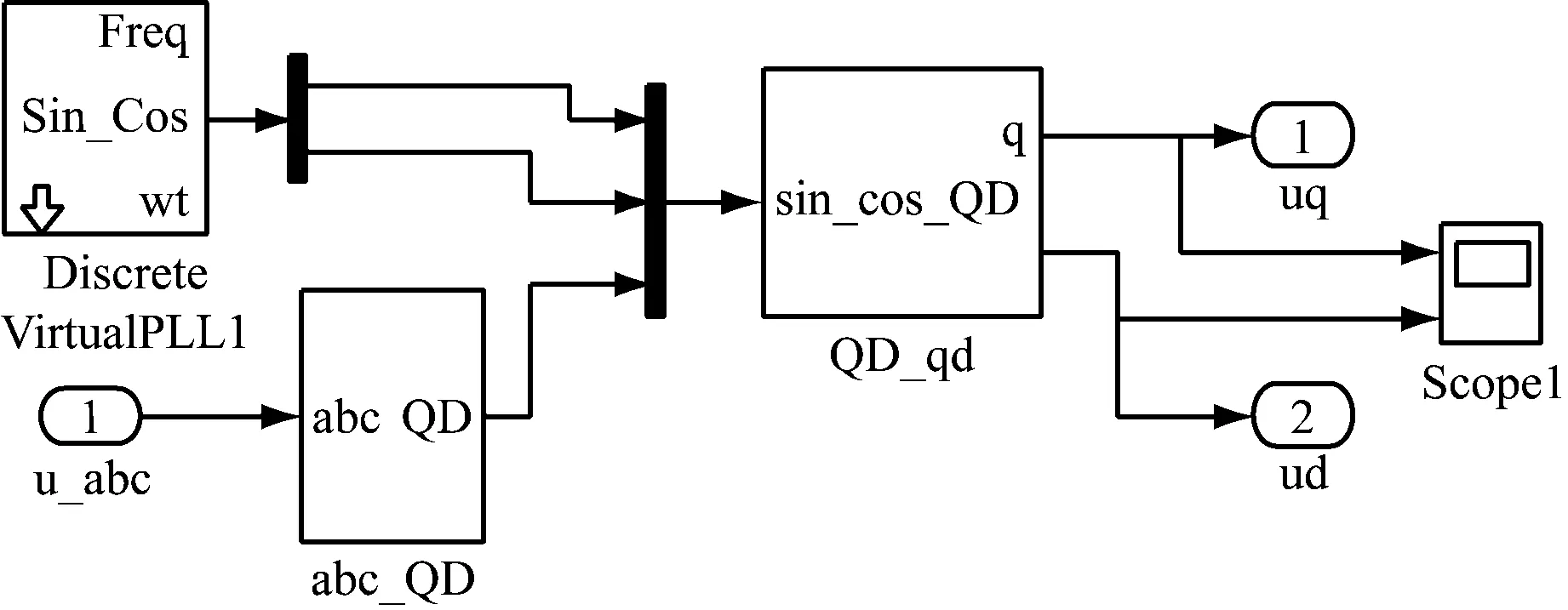
图7 电压变换模型

图8 控制器离散化模型

图9 逆变器电压反馈建模
考虑2种负载的情况,其中:第一种是稳定时整个船舶负载等效为一个RLC负载;第二种是需启动船用电动机时电机能否正常启动,启动船用电动机是否会对电源造成影响。
4.1 接入RLC负载
在RLC负载为440 V/60 Hz的情况下建模。Scope5输出模型的AB线电压见图10,在1个波峰之后,线电压趋于稳定,时间间隔约为16.7 ms,系统调节反应速度快。取图10中的1个稳定波形得到的正弦波见图11,频率稳定为59.771 Hz,满足所需变频器的要求,波形详细参数见图12。
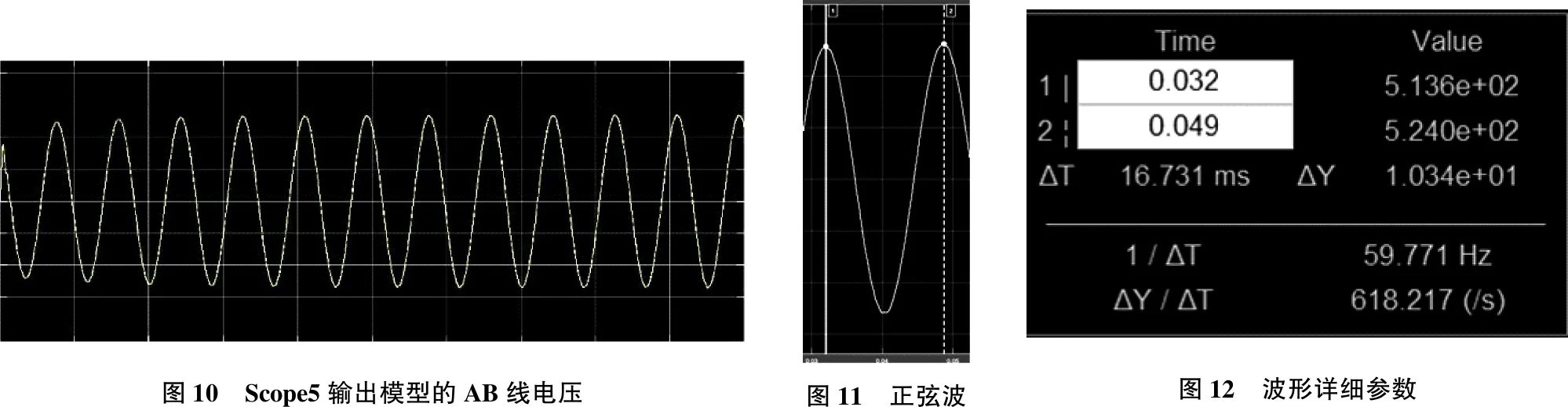
图10 Scope5输出模型的AB线电压图11 正弦波图12 波形详细参数
4.2 接入异步电动机
接入异步电动机(见图13)检验整个电源系统是否稳定、电机能否正常启动和启动性能是否良好,进行仿真设计和参数计算设计。在接入异步电动机时,整个电源系统的变化与接入RLC负载时的变化相似,经过1个周期的不稳定波动之后恢复正常。异步电动机启动参数变化情况见图14。转子转速在0.02 s时达到阶跃峰值;系统在0.12 s时趋于稳定,有着良好的启动性能,响应速度快,满足启动要求。

图13 异步电动机接入示意
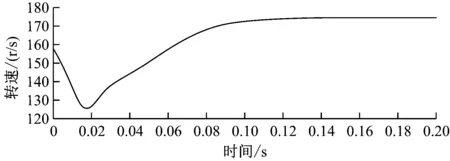
a) 转子转速变化
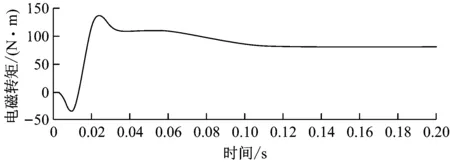
b) 电磁转矩变化
5 结 语
本文重点研究岸端变频器在并车完成并稳定之后的电压控制策略,进行系统建模仿真。经过计算分析得出需要的参数,并对不同参数进行负载试验,得到较好的结果,提出的内环控制策略可供实际岸电控制策略的设计参考。