柔性化机器人抓具在汽车厂中的应用
2019-04-18姜正宝
姜正宝
柔性化机器人抓具在汽车厂中的应用
姜正宝
(江苏盐城东风悦达起亚汽车有限公司,江苏 盐城 224000)
随着人们的审美观在不断的变化,汽车的更新也随之换代越来越快。各汽车厂为了降低设备上的成本,对夹具的柔性化的要求也越来越高。文章主要介绍了汽车制造中所用焊装机器人抓具重要性、应用范围和特点以及在汽车制造中的设计要求。
柔性化机器人抓具
1 引言
目前我国的汽车行业步伐有所减缓,各厂商也在不断的从自身出发寻找突破口。首当其冲的就是降本增效,随着汽车更新换代的脚步加快,个汽车厂都在追寻设备投入成本的降低,而焊装车间设备焊夹具的投入又是重中之重。这就要求各厂商怎么投入更少的设备来生产一款全新的车型,于是柔性化夹具就被越来越多的厂商所追求。而我们今天要讲的就是柔性化夹具里面的一个分支——机器人柔性化抓具。
2 机器人抓具分类
目前柔性化机器人抓具一般分为普通抓具、可变伺服抓具及多功能抓具(焊枪+抓具)。从整个行业来看其中可变伺服抓具应用的最多最广。对应不同的用途机器人抓具又可以分为地板机器人抓具、侧围机器人抓具、门盖机器人抓具、以及焊接抓具一体式机器人抓具。
2.1 机器人抓具的特点
机器人抓具在焊装白车身制造中起到不可替代的作用,其快速准确的特点符合现在快节奏的生产节拍。在焊装白车身的制造中比如侧围及地板件都属于大而重的部品,如果靠人工搬运显然是跟不上现在的快节奏的。还有目前大多数厂商的焊装生产线都是柔性化的生产线,多款车型共用一个生产制造线,这时柔性化的机器人抓具就起到作用了,在对应不同车型的不同部件时只需要通过伺服信号来切换抓具,就可以对应不同的车型。
2.2 机器人抓具的主要构成
柔性化机器人抓具一般有框架、抓取单元、保护单元、定位单元、夹紧单元、感应单元、控制单元。
还有就是抓具的定位主要根据部品的外形面、工艺孔、装配孔、外部边缘等进行定位;对被抓举的工件分别进行定位,保证其之间没有干扰;其次在固定定位元件的时候要充分利用每个工件的装配相互依赖关系来进行自然定位。
3 柔性化机器人抓具主要应用
(1)顶盖自适应吸盘抓具
这种抓具有抓举灵活,对被抓举的顶盖定位要求不高,可以在2mm~3mm公差内自适应抓举。
首先是将顶盖总成放到特定的自动货架内,然后放到工位货架房间内,货架房间有区分车型感应器,在放入后只需输入指定的车型代码,接下来R318-6顶盖抓具机器人就可以接受到信号开始工作。将顶盖抓到图2中中转定位夹具,再由R318-6机器人抓取到车身上进行焊接工作。整个工作流程节奏非常快,抓举的过程只需要30S左右。
R318-6就是属于顶盖自适应吸盘抓具,它由框架、控制单元、感应单元、真空吸盘以及配套气电等信号设施。
这种抓具的抓紧力是靠最前端吸盘的真空吸力作用,下图中一共有6个吸盘,从前到后对称排列。每个吸盘都有弹簧缓冲并在吸盘内部装有感应器,在顶盖误差2~3mm可以自动补偿。
(2)可变轨影像机器人抓具
这种抓具它一共由框架、控制单元、感应单元、检查感应摄像头、伺服电机、伺服轨道以及配套气电等信号设施。
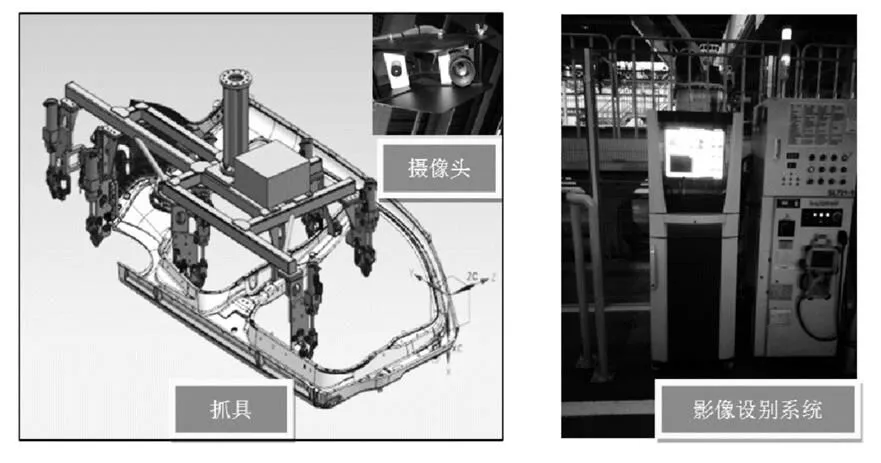
图1
这种抓具在一些汽车部件高精度配合上应用的比较广。比如下图中白车身合成焊接工位,在这个工位上首先由可变轨影像机器人抓具将侧围总成抓取,在这个过程中由于装载侧围的每个EMS吊具状态不一致,如果机器人只是按照设定的程序固定的去抓取部品,这样就会容易导致偏差,偏差导致的结果就是车身合成精度下降,就会容易出现不良车身,在车上精度装配精度上都达不到标准。这时机器人变轨影像抓具中的影像设别系统就开始工作了,它会通过影像处理系统对待抓取部品进行影像识别,一般会一个工艺孔进行识别,把这个工艺孔的坐标输入到系统里,然后在实际抓取前对该工艺孔的位置与系统里的标准位置进行比较,根据比较结果再电脑程序再控制伺服电机进行误差补偿。这样就能保证车身抓取时将误差降低到公差范围内,以保证车身的整体精度。
(3)一般柔性化机器人抓具
此类抓具较上述影像抓具相比它少了一个自适应调节,它可以通过伺服电机对夹紧单元进行切换,只是它这种切换是由之前设定好的程序进行切换,并不能智能补偿误差。它一共由框架、控制单元、感应单元、伺服电机、伺服轨道以及配套气电等信号设施。

图2
一般柔性化机器人抓具它主要用于抓取表面外观质量要求不高的部品,比如大的底盘部品及侧围加强板。通常对于这种抓具会在夹具单元的最前端装有万向球头,可在一定范围进行角度调节达到抓牢部品的目的。
(4)焊接抓具一体化
这类抓具主要相比于一般柔性化机器人抓具,主要多了一个焊接的功能。其是集焊枪和抓具一体的多功能抓具,它的一般工作流程主要是首先由抓具进行工作,将工件抓取到焊夹具上,在焊夹具将工件固定后再由焊枪进行焊接工作。由于要执行多项工作,机器人前端的负荷不能过大,太大了会影响灵活性,所以此类的抓具一般多应用于小件的抓取焊接工作。
4 结语
目前中国汽车市场已趋于稳定化,对于汽车企业如何适应市场、把握市场,生产的柔性化显得尤为重要。现代工业技术及自动化是生产柔性化的基础,而在规划时应确保自动化设备最大的共用性,充分提高资源的有效利用率。生产柔性化在具体应用时,还应结合中国的实际状况及企业的自身特点合理规划,才具实用性。
[1] 朱通. 高速传输抓取装置设计研究与仿真[D].长春理工大学,2017.
[2] 牛正风,洪恺,籍胜华,等.浅谈卡车柔性自动化焊装生产线设计开发[J].装备制造技术,2016(08):49-51.
Application of flexible robotic gripper in automobile factory
Jiang Zhengbao
( Jiangsu Yancheng Dongfeng Yueda Kia Motors Co., Ltd., Jiangsu Yancheng 224000 )
As people's aesthetics are constantly changing, the car's update is changing faster and faster. In order to reduce the cost on the equipment, the auto manufacturers have higher and higher requirements for the flexibility of the fixture. This paper mainly introduces the importance, application scope and characteristics of the welding robot gripper used in automo -bile manufacturing and the design requirements in automobile manufacturing.
flexible robotic gripper
U466
A
1671-7988(2019)07-183-02
姜正宝,男,(1983.10.-),江苏盐城,汉族,本科,助理工程师,就职于江苏盐城东风悦达起亚汽车有限公司。
U466
A
1671-7988(2019)07-183-02
10.16638/j.cnki.1671-7988.2019.07.061
