抓桶机构几种问题的分析与改进
2019-04-18张收良任国涛黄振峰薛亚刚付伟龙
张收良,任国涛,黄振峰,薛亚刚,付伟龙
抓桶机构几种问题的分析与改进
张收良,任国涛,黄振峰,薛亚刚,付伟龙
(陕西汽车控股集团有限公司,陕西 西安 710200)
抓桶机构是压缩式垃圾车的重要组成部件,由伸缩臂、举升臂、挂桶架、压桶板等零件组成的运动机构,实际使用过程中容易出现挂不住桶、掉桶、抛洒垃圾等问题,因此有必要进行动力学分析,获得影响因素,进而优化改进设计工作。
抓桶机构;动力学;压缩式垃圾车
前言
随着全国城镇化水平以及人民生活水平的快速提升,2017年我国城市垃圾清运量预计达到2.25亿吨,10年来以年均4.28%的速度不断增加[1],有力推动了传统垃圾车市场的快速发展;另一方面,随着社会老龄化的加剧,以及社会劳动力的减少,各城市管理部门或企业的用工成本逐年增加,智能化的垃圾车未来会有较大的市场潜力;因此有必要研制一款智能化、自动化程度更高的压缩式垃圾车,而研制过程中需要更好地解决传统压缩式垃圾车使用过程中出现的典型问题。
抓桶机构是压缩式垃圾车的重要组成部件,主要功能是车辆驾驶员的操作下,抓举车辆右侧一定距离外的垃圾桶,并完成对垃圾桶的移动、举升、倾倒,因此不需要操作工人下车挪桶和挂桶,能大幅提高工作效率,降低使用成本。
1 抓桶机构组成及工作原理

图1 抓桶机构简图
1.举升臂 2.压桶板 3.挂桶架 4.减震块 5.压桶油缸 6.翻桶油缸 7.举升油缸 8.伸缩臂
驾驶员停车后,操作工作装置手柄,举升臂4、挂桶架3和压桶板2在油缸3和5的作用下绕伸缩臂6上部绞轴旋转一定角度,伸缩臂在油缸作用下伸长至合适位置,举升臂继续旋转完成抓桶,压桶板2压桶;伸缩臂在油缸作用下回位,举升臂1继续旋转,挂桶架2在油缸6的作用下旋转,即完成垃圾桶倾倒功能;驾驶员操纵手柄完成垃圾倾倒后,做以上运动的逆向操纵,可以将垃圾桶放回原位。
2 抓桶机构几种问题的分析
根据压缩式垃圾车实际使用情况,着重解决上料过程中抓不住桶、掉桶、抛洒垃圾、倒不干净等问题。为分析以上现象的形成原因,需要确定挂桶架运动过程中的瞬间位置、速度等参数,故进行动力学仿真。首先建立仿真模型,添加约束及力场,设置仿真参数后计算,进而优化设计参数。
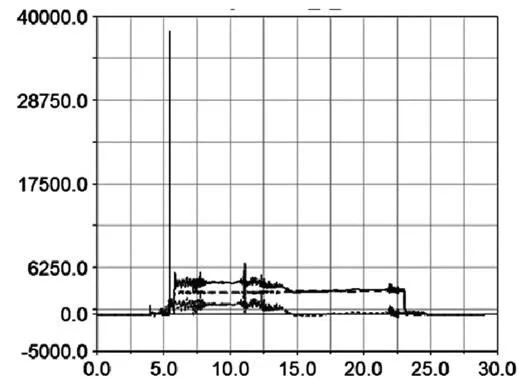
图2 挂桶架受力曲线
(1)针对压缩式垃圾车自动化程度较高,但可能会出现抓不住桶的问题,输出挂桶架的受力曲线,如图2洋红色曲线,抓桶机构5 s时接触垃圾桶,5.5 s后挂桶架稳定负载1637 N,可以判断为挂住垃圾桶;而23 s后卸载垃圾桶后稳定载荷为0 N。经过多次仿真发现,挂桶齿水平伸缩过程中有向下的位移量(以下称:下沉量),其对“挂不住桶”影响最大,进而提取挂桶齿的下沉量,由初次分析得知4.68 s时挂桶齿沉降量为30mm,而0 s~4.68 s之间的下沉量严重影响司机操作抓桶的准确性。同时分析得知,伸缩臂刚度及其与机架之间的间隙是形成下沉量的主要原因之一,因此前后两次调整间隙值,提取伸缩臂水平移动过程中的垂直位移量,对比分析结果(图3),发现优化结构后,伸缩臂下沉量有较大的改善。也就是说,自动抓桶的瞬间,由于下沉量的存在,软件程序中伸缩油缸、举升油缸的伸出行程不足导致挂桶齿不能挂住垃圾桶,因此编写程序时需要进行数据的补偿。
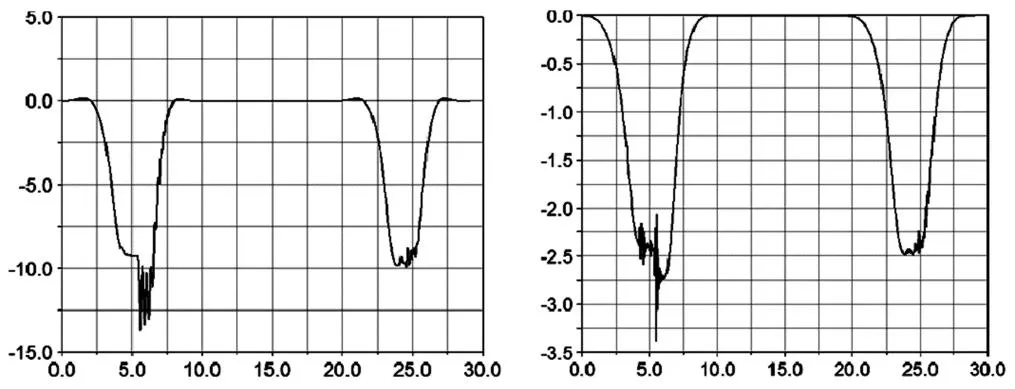
图3 调整前后伸缩臂下沉量曲线
(2)根据对压缩式垃圾车抓桶上料过程的调研分析,掉桶现象主要出现在举升臂上止点附近,有时是倾倒垃圾前掉桶,有时是倾倒垃圾后掉桶,因此决定通过多次仿真分析,获得其影响因素,以便于更好的指导相关部门调整生产条件,提高抓桶机构的可靠性和生产一致性。
基于以上思想,在分析结果中提取挂桶齿与垃圾桶的接触力,如图4,图中蓝色曲线为挂桶齿后边缘线载荷,红色曲线为前边缘线载荷。从图中可以发现,挂桶齿与垃圾桶的接触近似线载荷。当举升臂举升至最大值16.5 s时,垃圾桶在翻桶油缸作用下快速旋转,垃圾桶与挂桶齿之间的接触力剧烈波动,是造成掉桶的主要原因之一。因此,提取压桶板对垃圾桶的压力变化曲线如图5。分析得知,在保证压桶板主动力大于4000N的情况下,垃圾桶不发生角度位移,即垃圾桶不会掉落。为验证分析结果,提取垃圾桶与挂桶架橡胶减震块的接触力,如图6,可知在抓桶机构挂上桶(5.5 s)至完成卸桶(24.5 s)之间,垃圾桶下端桶壁与橡胶减震器接触力始终存在,因此判断不掉桶。

图4 挂桶齿线载荷曲线

图6 桶壁与减震器的接触力曲线
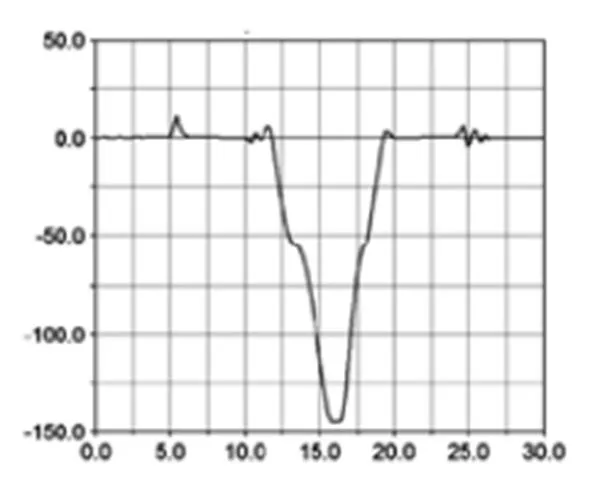
图7 垃圾桶坐标旋转角度曲线
(3)根据对压缩式垃圾车上料过程中的掉垃圾问题,经多次的调研与分析,一方面因为使用者装载过满,即所谓“冒顶”;另一方面,传统垃圾车的抓桶机构是四连杆机构,由于刚性从动杆的作用,垃圾桶运动过程中的倾角不能瞬时调整,同时垃圾桶盖处于打开状态,部分瞬时超过了垃圾的安息角,即造成撒垃圾现象。
(4)基于以上思路,在动力学仿真中提取垃圾桶的坐标旋转角度,如图8。在翻转油缸的作用下,垃圾桶的倾角在运动过程中自动调整,从曲线可知,在13.1 s时举升臂运动至上止点,垃圾桶上沿进入箱体接料板,垃圾桶坐标旋转55°,其Y轴与地面夹角在第一象限35°,也就是说垃圾桶还未水平横置,同时垃圾桶盖处于关闭状态。很明显,垃圾不会从桶里掉落出来。
(5)关于倒不干净的问题,如图7所示,从13.1 s~16 s,垃圾桶旋转138°,垃圾桶Y轴与地面夹角处于第二象限,大于设计标准45°[2],同时停止运动0.3 s,以确保将垃圾倾倒干净,该仿真阶段符合实际使用情况。
3 结论
目前,环卫车辆的国内市场仍处于高速增长期,但细分市场的传统垃圾车已逐渐开始由增量市场进入存量市场,需要提升压缩式垃圾车的智能化、自动化程度。而本文通过实地调研,筛选出压缩式垃圾车抓桶机构出现的几个典型问题,并通过动力学分析手段,提炼出明确的参数指标,并对抓桶机构进行了多次改进,研制出自动化的挂桶机构,可以明显提高生产效率,降低企业的使用成本。
[1] 环卫科技网.2018年中国环卫装备行业发展前景及市场规模预测.
[2] 根据汽车行业标准.QC/T 52-2015垃圾车.
Analysis and improvement of several problems of bucket catching mechanism
Zhang Shouliang, Ren Guotao, Huang Zhenfeng, Xue Yagang, Fu Weilong
( Shaanxi Automobile Holding Group Co., Ltd., Shaanxi Xi'an 710200 )
Bucket grab mechanism is an important component of compressed garbage truck, a movement mechanism com -posed of telescopic arm, lifting arm, bucket rack, bucket plate and other parts, in actual use, it is easy to fail to hang the bucket, drop the bucket, throw garbage and other problems, therefore, dynamic analysis is necessary, acquiring influencing factors, then optimize and improve the design work.
Grab bucket mechanism;dynamics;Compact garbage truck
U467
B
1671-7988(2019)07-82-03
张收良,就职于陕西汽车控股集团有限公司。
U467
B
1671-7988(2019)07-82-03
10.16638/j.cnki.1671-7988.2019.07.028
