自走式无人驾驶植保机用发动机转速控制系统设计
2019-04-17孟令民曾庆华李安伟张德利
孟令民,曾庆华,李安伟,张德利
(山东永佳动力股份有限公司,山东 临沂 276000)
0 引言
随着农业机械智能化水平的不断发展,以及精准施药工程在植保机械行业的推广应用,自走式无人驾驶植保机械因其结构精巧,可智能遥控,具有田间通过性好、施药效率高、安全性能好,避免操作人员中毒等优点,受到越来越多的农民及主机生产厂家的青睐[1]。在实际工作过程中,由于工况变化等原因,为了保持稳定的行走速度,常常需要调整发动机的转速以适应扭矩的变化,在起步、换挡过程中,为实现良好的离合控制品质,需要对发动机转速和离合器的结合速度进行协调控制[2],因此,发动机转速控制成为自走式无人植保机开发的一个关键问题。
自走式无人驾驶车辆的负载变化常常是不可预测的,所以发动机转速是一个受负载影响的变量。传统的比例积分微分(proportion integral differential,PID)控制对于这种复杂变化过程很难设置最佳参数,与其搭载的油门电机对控制响应具有一定的滞后性,因此无法达到理想的控制效果。神经单元具有自学习和自适应的能力,将神经元自适应功能与传统的PID结合,可以设计出在线实时调整参数的PID控制器,解决最佳参数设计的问题。永磁直流电动机搭载非接触式位置传感器和伺服电机,具有电机调整性能好、力矩大、起动迅速、操控方便,且定位精确等特点[3]。
本文中通过分析自走式无人驾驶车辆在起步及换挡过程中产生顿挫感的原因,研究基于扭矩需求的发动机转速非线性变化规律,确定发动机转速控制目标,设计神经元自适应PID控制器对永磁直流电动机进行控制的发动机转速控制系统,选用永磁直流电动机对节气门进行控制,并对控制的有效性进行试验。
1 发动机转速控制目标
1.1 起步过程
基于自走式无人驾驶植保机械的实际工况,车辆起步过程中离合器的扭矩变化很大,反映在发动机转速控制上就是发动机输出转速与变速箱输入转速不断变化的过程。在变速箱开始接合时,发动机的输出转速与变速箱的输入转速差值最大,随着离合器接合行程的不断增大,离合器的转矩也在不断增加,直到转矩大于车辆所受阻力矩时,车速从零开始增加,此后发动机的输入转速与变速箱的输出转速差值不断减小,直到完全同步。如果想要得到良好的起步效果,达到迅速平稳的起步要求,需要对起步过程中车辆的加速度变化率和离合器的滑磨功进行评价。
车辆加速度的大小反映了车辆起步过程中的冲击度[4]
(1)
式中:R为车轮半径;i0为主减速器传动比;It为与变速器输出轴刚性连接的整车惯量转换至输出轴的当量惯量;To为变速器输出轴转扭;KI为常数;vc为离合器接合速度。
离合器滑磨功[5]

(2)
式中:t1为车辆开始运动的时刻;t2为发动机的输出转速与变速箱的输入转速同步的时刻;Tc为离合器传递的扭矩;ne为发动机转速;nc为变速箱输入转速。
通过分析车辆的加速度变化率和离合器滑磨功的产生机理,可知整个起步过程是发动机转矩和离合器的结合速度协调控制的过程,所以起步过程的发动机转速控制目标是:根据离合器接合过程中对扭矩需求的不同,在发动机的怠速附近设置转速判定阈值,把发动机工作时各节气门开度下的最大扭矩转速设置为目标转速,根据不同节气门开度下发动机扭矩与转速的变化关系,通过调整发动机节气门开度,匹配发动机需求扭矩,选取某一节气门开度下最大扭矩时发动机转速作为发动机目标转速[6]。
1.2 换挡过程
换挡过程中车辆传动系统的传动比发生变化,自走式无人驾驶车辆因为换挡过程时间很短,整车惯性很大,车速下降很小,一般认为换挡期间车速不变,所以换挡过程可以看作是变速箱输入转速的变化。为了消除顿挫感,需要及时调整发动机的转速去适应这种变化。挡位变化前后输入转速n0、nn变化的计算公式为:
n0-nn=i0va(igm-ign)/(0.377R),
(3)
式中:i0为主减速传动比;va为当前车速;igm为挡位变化前速比;ign为挡位变化后速比;R为车轮半径。
因为加挡和减挡过程中车速变化不同,所以要减小换挡时车辆冲击和变速箱离合器接合时的滑磨功,就要通过控制发动机转速,使之适应换挡过程中传动比的变化。换挡过程中发动机转速控制目标是:在离合器切断动力时,变速箱的扭矩需求发生变化,此时通过判断变速箱挡位变化,调整发动机节气门开度,从而调整发动机转速,使发动机目标转速与挡位变化后离合器输入轴的转速相同。
2 发动机转速控制方式
为了解决传统电机反应迟钝的问题,试验中采用永磁直流电动机进行发动机节气门调节。其系统结构如图1所示。
自走式无人驾驶车辆加速踏板与节气门之间没有直接机械联系,需要由直流电动机进行发动机节气门调节。通过发送启动或者换挡指令信号,将数字信号输入电子控制单元,电控单元按照设定的程序向发动机节气门执行机构发送指令信号,永磁直流电动机通过指令调整节气门开度,从而控制发动机转速。车辆行驶时由GPS反馈的车速、车桥输出转速等信息对节气门开度大小进行实时调整,保持车速稳定。
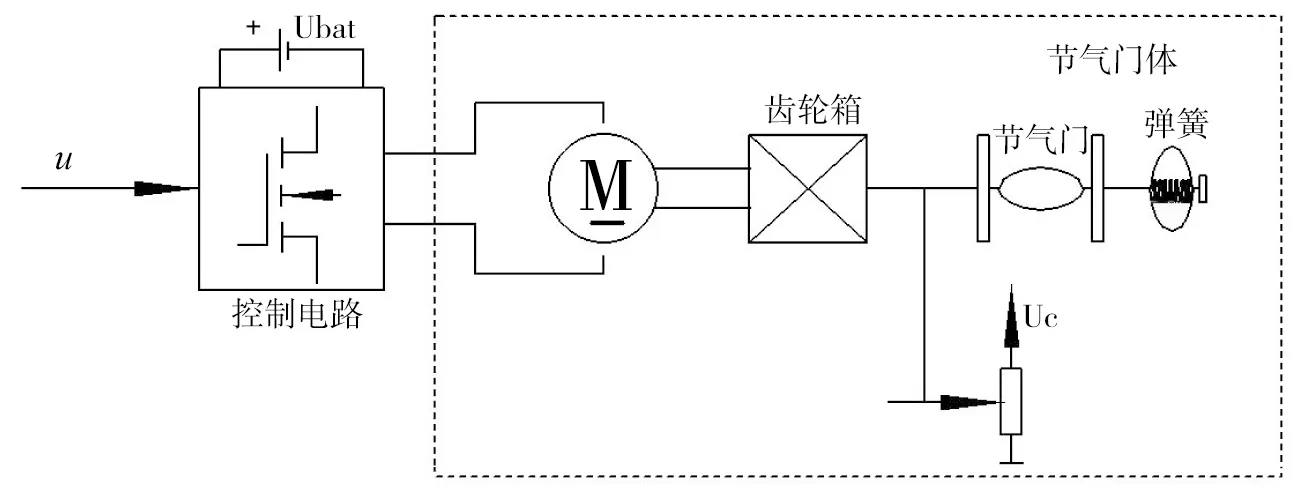
图1 电子节气门结构
3 发动机转速控制器设计
本文中运用神经元自适应PID算法,充分利用神经元的自学习功能,调整神经元的权重,从而使整个控制系统具有自适应PID的控制特性,以满足根据发动机运行情况实时调整PID调节器参数的要求。神经元DID控制系统如图2所示。
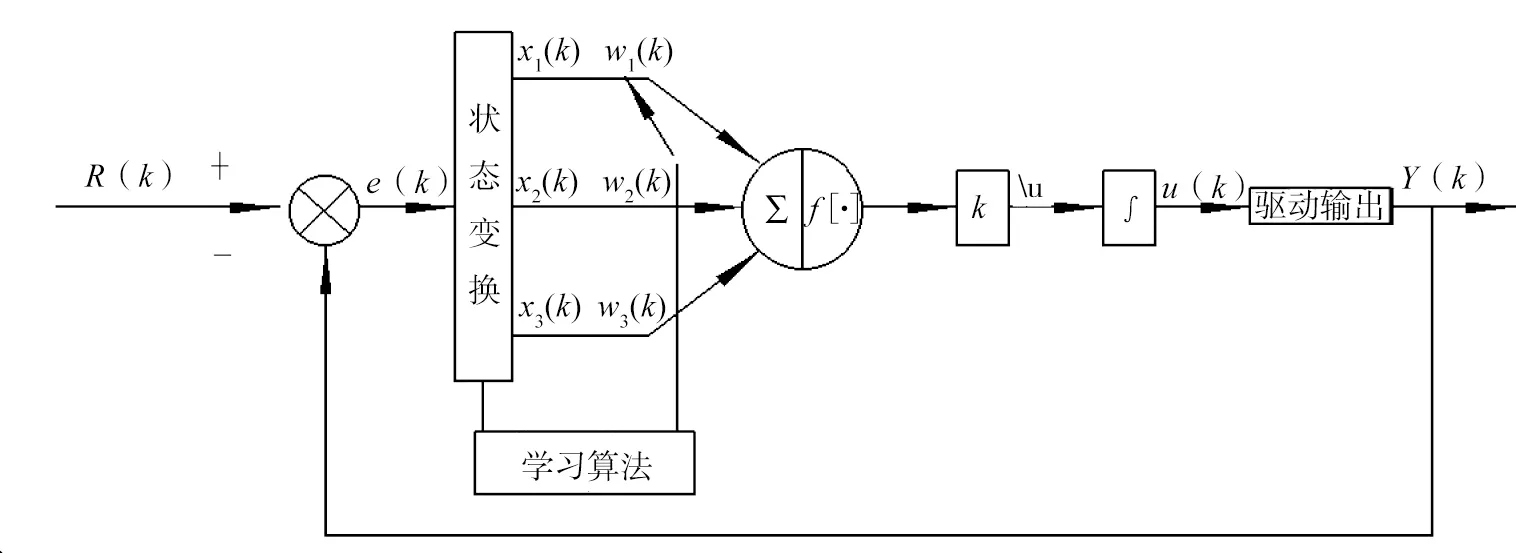
图2 神经元 PID控制器系统框图
图2中,R(k)为发动机目标转速、Y(k)为发动机实际转速;k为神经元的比例系数;e(k)为神经元输入,即PID控制器的输入;x1(k)、x2(k)、x3(k)分别为状态变换器输出的神经元学习控制所需要的状态量,设计中选择能够反映扭矩需求的车速、发动机转速、变速箱转速数据;ω1(k)、ω2(k)、ω3(k)为神经元的权重系数;f[·]取带限幅的线性函数;u(k)为神经元输出,即PID控制器的输出。
状态量为:
x1(k)=R(k)-Y(k)=e(k),
x2(k)=e(k)-e(k-1),
(4)
x3(k)=e(k)-2e(k-1) +e(k-2),
u(k)=u(k-1)+k[ω1(k)x1(k)+ω2(k)x2(k)+ω3(k)x3(k)]。
利用二次型性能指标的思想对神经元输出误差的控制取目标函数:
(5)
式中:r为给定目标值;y为实际反馈值。
为保证权重修正从H(k)相应于ω1(k)负梯度的方向进行,需要有:
(6)
式中ηi为学习效率。
由式(4)、(5)可以简化得到,
若令
因此可得:
(7)
利用式(7)可以实现权重值的自学习。
对于传统的PID控制器来说:
(8)
式中:Kp为PID控制器的比例系数;TI为积分时间常数;TD为微分时间常数;T为采样时间。
对于神经元PID控制器来说,可以得到:
(9)
由式(8)(9)比较可得到,
Kp=kω1(k),
KpT/T1=kω2(k),
KpTD/T=kω3(k)。
4 试验结果与分析
针对神经元自适应PID算法的有效性,在电子节气门控制单元的基础上对发动机进行转速控制测试。在神经元自适应PID控制器中,以反映扭矩需求变化的车速、发动机转速及离合器转速数据为神经元学习所需要的状态量,选取学习效率η1=0.02,η2=0.01,η3=0.01, 神经元比例系数k=0.1,ω1(0)=ω2(0)=ω3(0)=0.001。图3为应用神经元自适应PID控制算法的发动机在AMT控制系统台架试验中起动及换挡过程的结果。

a)目标转速为800~2700 r/min b)目标转速为800~1700 r/min图3 转速控制试验结果
试验结果表明,该控制系统能够根据扭矩变化调整发动机的转速,调整时间为1.1 s左右,对发动机转速控制具有良好的动态控制特性。应用该系统能够较好的控制起步及换挡过程中对变速箱的冲击,达到迅速平稳起步换挡的目的。
5 结论
针对自走式无人植保机在起步及换挡过程中顿挫感强烈的问题,通过研究该过程发动机转扭变化规律,设计基于扭矩需求的发动机转速控制系统。
该系统能够完成对扭矩需求状态量的学习,调整发动机转速。试验结果表明,该系统对发动机转速具有较好的动态控制特性,能够有效控制起步及换挡过程中变速箱的冲击,达到迅速平稳起步换挡的目的。
