一带多的高速升降横移类机械式停车设备
2019-04-12代永赞
代永赞
(杭州大中泊奥科技股份有限公司,浙江 杭州 311200)
目前,我国机械式停车设备的主运行机构与停车位之间进行存取载车板动作的时候,不论采用何种机械结构都只能实现单一纵向存取车或者单一横向存取车方式,主要由于主运行机构上只能承担独立纵向或者独立横向存取车装置。正是由于该种技术障碍,导致我国不论是升降横移类、平面移动类还是巷道堆垛类机械式停车设备,在主运行机构与停车位之间进行载车板交换时都只能实现左右方向或者前后方向,对机械式停车设备的容车率造成极大影响。此次研究所设计的一带多的高速升降横移类机械式停车设备,能够有效解决普通机械式停车设备上主运行机构单一存取车装置,使机械式停车设备在4个方向均能存取车,提高了机械式停车设备的容车率。
1 高速升降横移类机械式停车设备结构和工作原理
1.1 结构概述
该设备主要按照九宫格形状设计,主要包括主升降机构(主升降电机)、纵移载车板、横移载车板。其中主升降机构的主升降电机最高升降速度可达30 m/min,并且在主升降机构上具有一个小电机,其能够利用横向同步轴、纵向同步轴(38)和伞形齿轮带动主升降机构上的主动轮进行逆时针或者顺时针转动。如果导轮上有载车板,则会根据载车板下端的前后方向还是左右方向的导向杆的不同进行左右横移或者前后纵移运行;在纵移载车板结构后部设有纵移电机,能够利用变频调速达到30 m/min。当纵移电动机正反运转时可以利用传动链带动传动轴运转,同时使安装在同步轴两端的主动轮转动。之后使主动轮利用皮带带动其他从动轮同步转动。在横移车位结构后部安装的横移电机能够借助变频调速达到30 m/min。当横移电机做正反运转时,通过传动链带动传动轴运转,同时使安装在同步轴两端的主动轮转动。然后主动轮通过皮带带动其他从动轮同步转动。
1.2 工作原理
汽车通过升降机动作到每层,稍微超出当前层的高度后,车位的梳齿架横移到升降井道中,升降机作下降动作;此时升降机的梳齿架和车位的梳齿架作交错动作,将升降机梳齿架上的汽车放置到车位的梳齿架上,此时升降机作下降动作到地面,车位梳齿架作横移动做到车位处后即完成一个存车动作。取车与之相反。具体流程如下:1)升降机下降到地面,车库门打开,司机将汽车开到升降机上,司机离开;车库门关起。2)设备系统检测到车空位,升降机上升到空位平层后,向上再走200 mm高度,停止。3)空位的梳齿架横移到升降井道当中,升降机做下降动作。在做完交错动作后,升降机作下降动作,空位的梳齿架做横移动作,到达原始状态。4)以上动作后一个存车流程结束,取车与之相反。中途也可实现升降机直接至其他层车位取车的动作。
2 高速升降横移类机械式停车设备设计要点
2.1 载车架设计
在设备原有基础之上利用装备和检修可视性优势,确保载车横梁的强度和刚度。其次,原有载车横梁吊点位置是通过倒车入库实现,然而大多数驾驶员会倾向于正进入库,此时由于较长车型车辆会遮挡车库光电开关,从而形成电气保护,导致停车设备无法运行。所以在设计期间需要应用C型钢拼焊载车架,并且结合车辆车型将吊点位置向后移动30 cm,完整装配之后使用薄板实施封闭操作。
需要注意的是制作载车架期间尽量采用C型钢制作。若使用矩形管制作将会延长工时消耗,应用C型钢制作只需要3 h工时左右。其次对于材料单价成本来说,应用矩形管制作的成本费用显著高于C型管制作成本,因此在设计期间需要注明采用C型管制作载车架。
2.2 防坠落装置设计
在设计期间由于涉及4个独立电磁铁式防坠落装置,增加了故障点。当前大部分立体车库都是应用电磁铁带2个安全挂钩的一带多电磁铁防坠落装置,如图1所示。使用连杆连接2个电磁铁。当电磁铁失电时,防坠钩会凭借自身重量处于垂直状态,避免载车板出现坠落情况。若电磁铁动作时,其会利用连杆带动安全挂钩动作,能够有效保护4个独立电磁铁式防坠落装置。
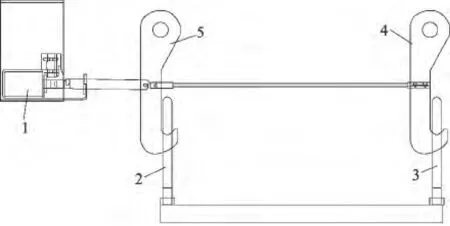
图1 一带多电磁铁防坠落装置示意图
相比于独立4个电磁铁式防坠落装置来说,采用一带多电磁铁防坠落装置因为减少电磁铁数量,从而减少故障点,进一步降低设计制作成本。然而该种防坠落装置的中间连接件比较多,因此要确保连杆可靠稳定连接。如果中间环节或者安装问题出现纰漏将会加大安全事故发生率。因此在采用一带多电磁铁防坠落装置时,如果没有在动端增加动作确认信号,将会导致载车板3个角出现下降,并且被剩余一个角勾住,容易出现车板倾斜情况。
机械式停车设备的防坠落装置设计需要按照如下设置要求进行设计:第一,注重汽车长度尺寸,如果超过停车辆尺寸,机械将无法动作并报警。一般来说可以在前后设计2个光电开关。第二,阻车装置:沿着车辆行进方向,将高度为25 mm的阻车装置设计在载车板上,也可以应用其他阻车设施。第三,警示装置:在设备运行期间需要提供光电警示信号或者声音警示信号,并且在显眼处设置适宜停车辆尺寸和质量标志牌。
2.3 霍尔效应传感器组合的设计和应用
图2为霍尔元件传感器组结构简图,在图2中所标识的A、B、C、D属于4组两套上下投影面对称的霍尔元件传感器。图2 中E表示永磁铁,主要固定在F轴上。随着载车板上下运行,E会联同F在霍尔元件组合检测区间内实现水平滑移。在空气隙中,随着E移出会降低磁感应强度。若传感器探头磁场强度超过限定值后,其内部触发器会发生翻转,也会相应翻转霍尔开关的输出电平状态,点亮指示灯,输出信号呈高电平。反之信号灯灭,输出信号呈低电平。
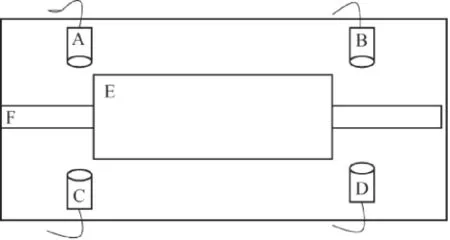
图2 霍尔元件传感器组的结构简图
在图3中,载车板在达到上限之前,其会与横梁下部止挡装置发生碰撞,提升链条拉动端部固定弹簧,压缩弹簧,带动F联同E一起向AC方向移动。此时AC传感器接收到较大磁场,会点亮指示灯,并且中断电动机供电。此时载车板停止运行,上行到位。
如果载车板处于下限之前,行至地面时会提升链条,并且使压缩弹簧恢复伸长,F连同E向BD方向移动,此时BD传感器接收到较大磁场,会点亮指示灯,并且中断电动机供电。此时载车板停止运行,下行到位。
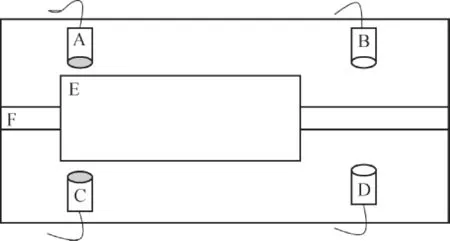
图3 载车板上限时霍尔元件传感器组合工作简图
在对F进行调节固定能够提升链条端部弹簧张力,当弹簧处于压缩状态时会使E达到AC传感器能够检测的铅垂面上;如果弹簧处于松弛状态时,此时载车板行至地面,弹簧只需要承担链条自重,并且使E达到BD传感器能够检测的铅垂面上。其余位置E位于ABC传感器均不能检测到中间位置,能够合理设置载车板上限和下限。其次,为了确保电气安全装置的稳定性,进一步加强车库系统安全性,需要在可编程逻辑控制器程序当中,对比AC传感器和BD传感器的电压。如果AC/BD传感器出现电位变化情况,则表示安全。在设计系统电气安全装置时应用霍尔元件传感器进行比较检测,能够提升系统安全性。
3 结语
综上所述,此次研究主要是围绕一带多的高速升降横移类机械式停车设备进行分析和研究,详细介绍了载车架设计、防坠落装置设计以及霍尔效应传感器组合的设计和应用,希望能够通过此次研究分析对相关设计人员起到参考性价值。
