远距离超声检测技术研究与实现
2019-04-10谷立臣王柯渊寇雪芹
何 凯,谷立臣,王柯渊,寇雪芹
(西安建筑科技大学机械电子研究所,陕西西安 710055)
0 引言
超声检测技术作为一种非接触式检测手段,与红外检测技术、雷达检测技术相比,具有成本低、可靠性高、能适应恶劣环境等优点[1],满足塔机主动防碰撞预警信息获取的需要。结合分析塔机回转速度、转动惯量以及控制系统和操作人员的反映能力,塔机防碰撞预警范围在20~30 m内有实际意义[2],能保证塔机防碰撞系统至少有8~10 s的预警时间。
美国Airducer AR30超声波检测系统作用距离可达30 m,但价格十分昂贵,很难大范围使用[3]。国防科技大学潘仲明根据压电材料的物理特性,并应用声学和电路匹配技术,研制了谐振频率为24.5 kHz的大作用距离压电圆盘式超声波换能器[4]。2009年,国防科技大学祝琴等人采用了新型超声换能器驱动电路和弱信号检测方法,提升了超声检测量程[5]。
由于超声换能器波束角大和超声波在空气中的强负指数衰减,超声回波信号极其微弱、信噪比低[6-8]。现有工业应用领域的超声检测距离较近(一般小于10 m),不能满足塔机主动防碰撞预警测量的需要[9]。因此,本文提出了基于振动模型的延时估计方法,研制了作用距离为33 m的远距离超声检测装置,解决了开展塔机主动式防碰撞技术研究的瓶颈问题。
1 远距离超声检测系统架构
研制远距离超声波检测系统,不仅要选择低频率、大辐射面积的高性能超声换能器,而且要优化超声换能器激励电路和信号调理电路设计,以提高超声传感器激励功率和超声回波信号信噪比[10]。
远距离超声检测系统主要由超声换能器、微控制器模块、超声信号激励模块、超声信号调理模块、温度补偿模块、外围功能模块等组成。如图1所示,超声信号激励模块由升压脉冲变压器、控制电路组成。超声信号调理模块由带通滤波电路、放大电路组成。外围功能模块主要包括电源电路、温度补偿、串口通信和最小系统。微控制器模块主要实现时序控制、超声激励脉冲生成、脉冲参数控制、信号采集等功能。

图1 远距离超声检测系统架构图
远距离超声检测系统基本工作原理如下:ARM微控制器生成PWM超声波脉冲序列,通过控制电路控制脉冲变压器通断从而激励超声换能器发射大功率超声波。超声脉冲遇到障碍物反射,经由换能器接收并转换为电信号,回波信号经过滤波电路和对数放大电路调理,送入微控制器进行采集和储存,微控制器采集温度信号并修正声速参数,再利用振动模型延时估计方法计算出超声波飞行时间,从而获取超声换能器与障碍物之间的距离信息。
2 远距离超声检测硬件电路
远距离超声波检测系统选用STM32F4作为微控制器,使用DYA-25-20C单发单收超声换能器和24 V电源供电;超声换能器驱动电路使用脉冲变压器提升驱动电压,超声信号调理模块主要实现带通滤波和对数放大功能。此外,电路使用MF58热敏电阻器测量环境温度,用于辅助修正声速。
2.1 超声换能器
超声换能器是利用超声波进行障碍物检测的关
键部件。在研制远距离空气超声波检测系统时,既要考虑超声波在空气中的强烈衰减特性又要兼顾超声换能器指向性问题[11]。因此,本文在选择DYA-25-20C型气介式压电陶瓷防水型超声换能器时,综合考虑了超声换能器的中心频率、指向性、工作电压、灵敏度等特性参数,其技术参数如表1所示。
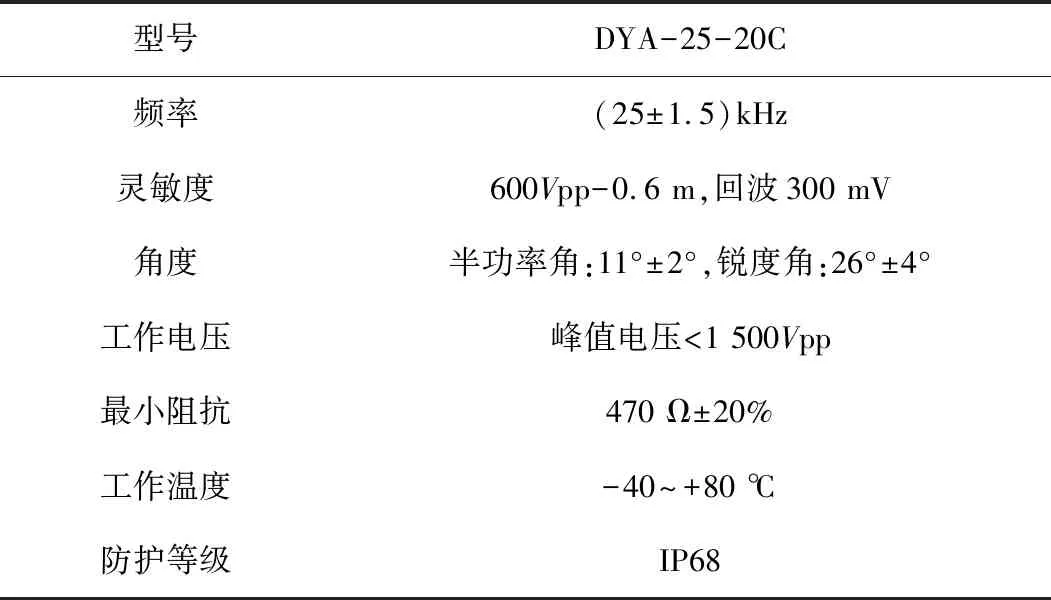
表1 DYA-25-20C型超声换能器技术参数
2.2 微控制器模块
微控制器的选择是超声检测系统方案设计中的重要环节。微控制器模块不仅用来激励超声脉冲,而且要对脉冲频率、脉冲个数、脉冲类型、脉冲电压等参数进行控制。
STM32F407内置了FPU单元具有很强的数字信号处理能力,具有3个采样频率为2.4 MHz的12位逐次逼近型的模拟数字转换器[12]。依据“Nyquist采样定理,在工程应用中一般取信号最高频率的3~5倍以上[13]。超声激励信号频率与超声回波信号频率均在25 kHz左右,因此,本文选用STM32F407芯片作为系统微控制器。
2.3 超声信号激励模块
如图2所示,该模块以微控制器生成的PWM超声波脉冲序列作为原始驱动信号,通过控制MOSFET管NTP18N06的通断将原始信号放大为同频率的峰峰值为800 V的高压脉冲信号,再由16∶270的EE19型脉冲变压器升压并驱动超声换能器。
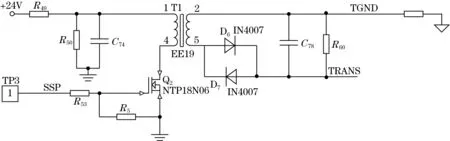
图2 超声信号激励模块电路图
二次侧电路中,二极管D6、D7反向并联实现超声换能器单发单收功能。当换能器处于发射阶段时,D6和D7在400 V电压的作用下依次导通和截止,超声换能器可正常发送超声波;当换能器处于接收阶段时,由于回波信号很微弱,幅值不能达到D6、D7的正向导通电压,回波信号会直接接入信号处理模块,驱动侧电路被隔离开来。电阻R60与电容C78并联用于吸收尖峰电压,起到电压防突变的作用,防止电压超过超声换能器的最高耐压造成损坏。
2.4 超声信号调理模块
远距离超声检测时,超声换能器通过正压电效应产生的电荷极少,回波幅值通常只有mV级[14]。此外,除障碍物反射的正常回波外,还伴有50 Hz工频干扰、杂波、塔机现场环境噪声等。超声信号调理模块主要抑制噪声和干扰,提高超声回波信噪比,主要由对数放大电路和带通滤波电路组成,如图3所示。本文设计了两级多路负反馈二阶有源带通滤波器,计算参数为:fc=26.525 kHz,BW=13.2 kHz,对数放大电路则选用AD8310放大障碍物回波信号。

图3 超声信号调理模块电路图
2.5 温度补偿模块
超声波传播速度受周围环境温度影响较大[15],传播速度与环境温度之间的影响关系如式(1)所示。要精确测量与障碍物之间的距离,实时检测周围环境温度是十分必要的。
(1)
本文使用的是MF58玻壳测温型NTC热敏电阻器,阻值允差1%,测温范围为-40~250 ℃。图4为温度补偿模块电路图,MF58与高精度电阻R62串联,微控制器采集MF58两端电压,根据分压原理计算MF58当前电阻并转换为温度值。

图4 温度补偿模块电路图
3 远距离超声振动模型延时估计方法
对于压电陶瓷式换能器,其振动部件就是压电陶瓷振子。当矩形波脉冲激励超声换能器时,通过逆压电效应一定的电机转换效率转换为力信号,使得压电陶瓷振子开始做受迫振动[16]。当激励脉冲结束后,压电陶瓷振子进行阻尼衰减振动。
接收超声回波时,由于声压使得压电陶瓷振子开始做受迫振动。振动部件以一定的机电转换效率转换为电信号。当到达的超声波信号结束后,压电陶瓷振子进行阻尼衰减振动。
超声波信号的上升沿特征主要由超声换能器机械振动部件的阻尼特性决定。其振幅变化规律如式(2)所示:
(2)
式中:F0为超声换能器机械振动部件的最大驱动力;ω0为固有频率;m为等效质量;β为阻尼因子。
根据DYA-25-20C型超声换能器的参数测定,对10个矩形脉冲激励下的超声换能器振动波形进行仿真,如图5所示。空气及障碍物振幅衰减器的距离衰减指数为 -1.110 5,空气温度为16 ℃。
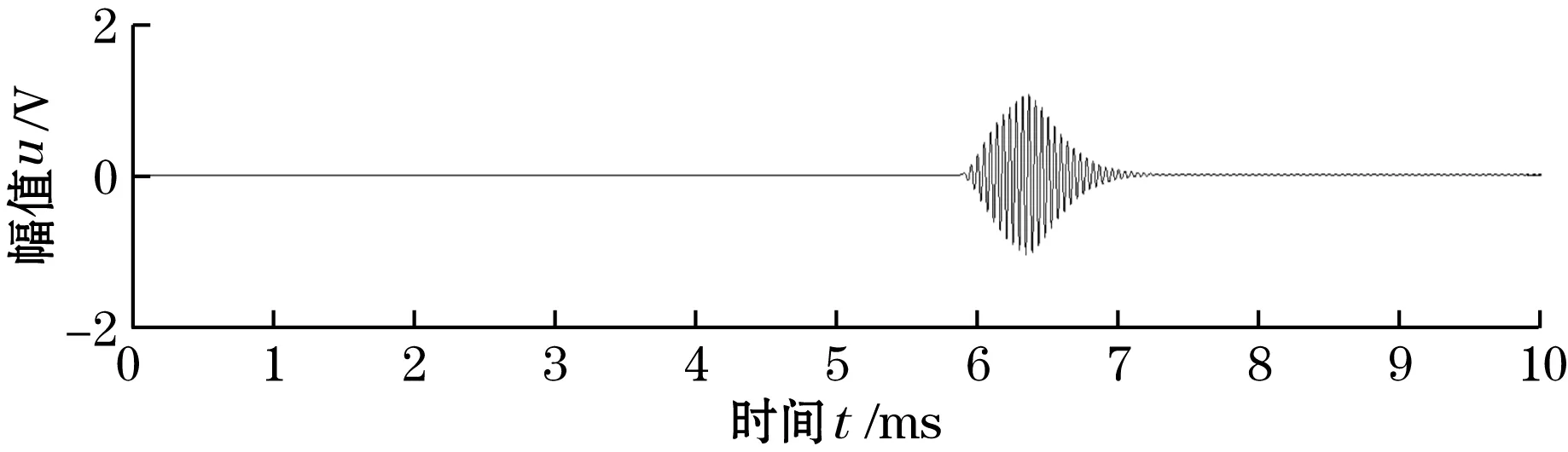
图5 10个矩形波脉冲激励时超声回波仿真信号
由式(2)可以看出,振幅A随着时间t以阻尼因子β为指数的规律变化。因此,振动模型延时估计法的基本思想是:根据统计理论,对超声波的上升沿进行拟合;在确定是超声回波信号后,由拟合曲线估计超声回波的起始位置。
阈值法运算速度快的特点主要利用了超声回波信号幅值与噪声信号幅值的差异性。考虑到实际应用需要,远距离振动模型延时估计法结合了上述基本思想和阈值法,利用超声换能器振动时域波形特征识别超声回波信号,并由此估计超声回波起始位置。该方法具体步骤如下:
(1)设定超声回波的检测阈值、检测窗口长度,临界判定系数R0;
(2)以逐点步进的方式检测超声回波时间序列,在窗口长度下,拟合当前窗内时间序列,拟合公式为y(t)=A0(1/β-e-βt);
(3)当拟合结果的判定系数R1大于R0时,确定障碍物存在,记录当前窗口位置,以此判定系数R1对应的拟合公式估计超声回波的起始位置;
(4)当拟合结果的判定系数R1小于R0时,进行步骤(2)。
4 试验研究
为了测试本文研制的远距离超声波检测系统的性能,在空旷地段测试其检测量程、检测精度等相关参数。障碍物尺寸为120.0 cm(宽)×84.5 cm(高)×2.2 cm(厚),振动模型法阈值设定为0.09 V,检测窗口长度为100,临界判定系数R0为0.95,障碍物距离为33 m,超声激励信号和超声回波信号如图6所示。
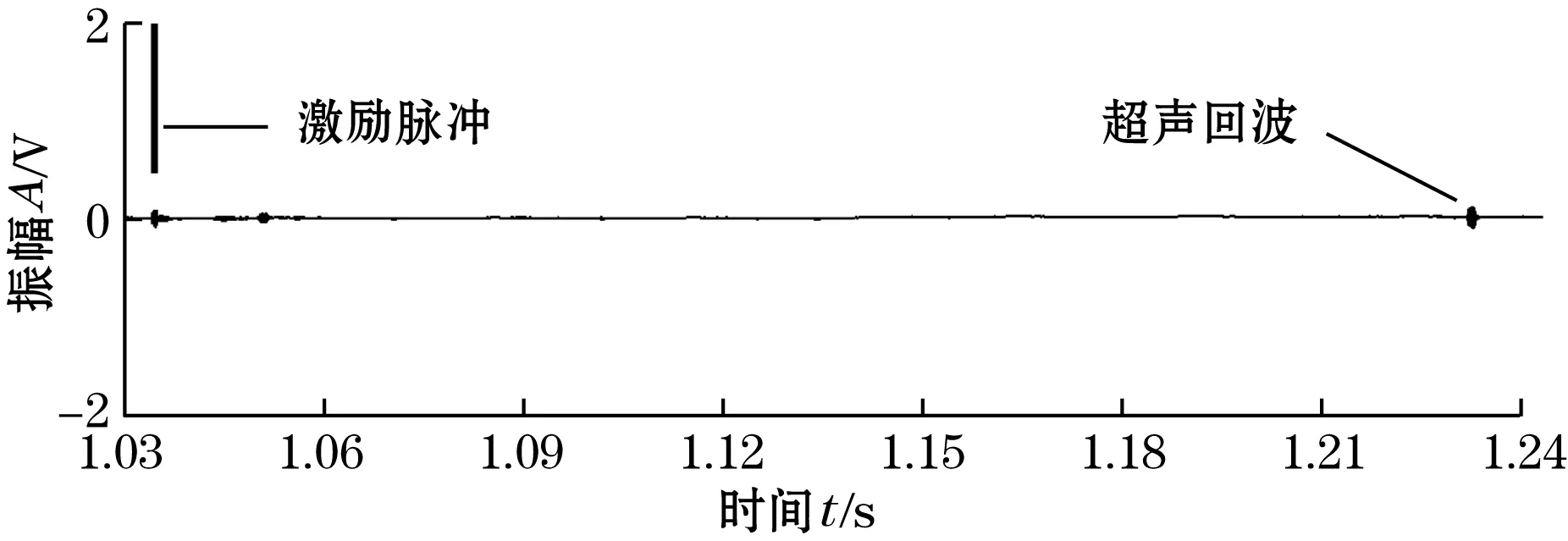
图6 平面铁板距离33 m时超声信号
表2给出了利用振动模型延时估计方法计算出的远距离超声检测结果。试验环境温度为22 ℃,在检测算法中,根据式(1)进行了速度修正,c=344.6 m/s。通过上述实验说明,该系统可以较好地实现远距离障碍物检测。
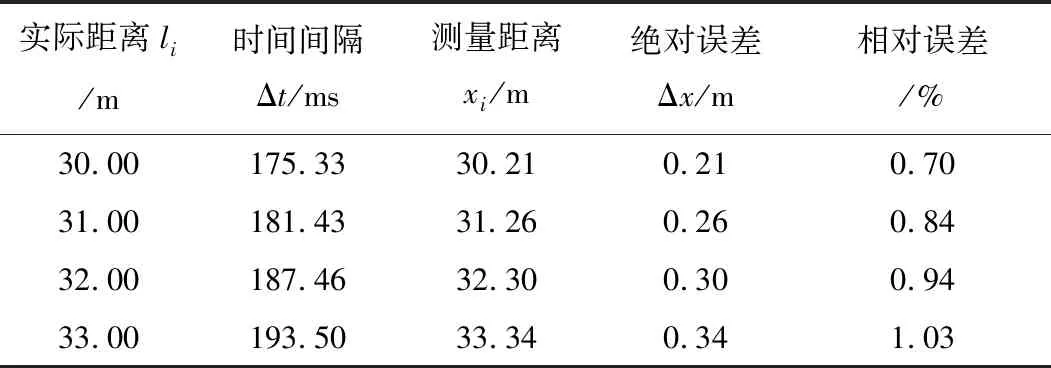
表2 振动模型法远距离检测实验结果 (阈值电压:0.09 V;R0:0.90)
5 结论
研制高性能超声波检测系统仍然是当今空气超声检测技术领域富有挑战性的研究课题之一。超声波检测距离是实现塔机主动防碰撞的一个关键技术参数。经过大量试验验证表明本文研制的远距离超声波检测装置电路实现简单、工作稳定可靠、检测精度高。该系统可以检测距离为33 m的障碍物,其性能指标超过了美国同类产品AR30,为塔机防碰撞系统的检测技术提供了数据支持。
