基于鱼钩试验的车轮离地高度测量方法
2019-04-09刘建军孙明梁东
刘建军 孙明 梁东
(中国汽车技术研究中心有限公司)
根据美国NHTSA 统计,尽管只有3%的交通事故和翻车有关,但其致死率却高达33%,因此汽车的抗翻滚稳定性越来越受到各个国家的重视。目前,欧盟ECE R140、美国FMVSS 126 以及中国GB/T 30677—2014 都是通过正弦停滞试验来检验汽车的电子稳定系统(ESC)。此外,美国US-NCAP 制定了更加严苛的鱼钩试验来评价车辆的抗翻滚能力。该试验评价车辆抗翻滚稳定性的最重要指标是在规定的试验车速和转向盘输入下,车轮离地的高度是否超过50.8 mm。鱼钩试验实施的难点是实现车轮动态离地高度的测量,文章设计了适用于鱼钩试验要求的车轮离地高度测量方法,为鱼钩试验的实施奠定了良好的基础。
1 车轮跳起运动状态分析
汽车通过悬架将车身与车轮连接到一起,悬架能够支撑车身和减小车身振动。车轮和车架之间的相互作用力都是靠悬挂来传递的,因此车轮的运动状态也主要取决于悬架的结构形式。汽车悬架总体上分为独立悬架和非独立悬架。图1 示出2 种结构形式悬架的车轮跳起运动姿态。
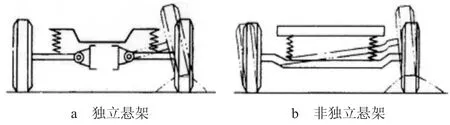
图1 汽车悬架车轮跳起运动姿态图
独立悬架可简单地理解成,左右2 个车轮没有通过1 根轴刚性地连接在一起,任意一侧车轮的悬架部分分别与车身连接,因此独立悬架2 个车轮的运动是独立的。独立悬架车轮跳起的运动可以看成是绕着车轮自身侧下摆臂节点的圆周运动。独立悬架车轮跳起的运动姿态[1],如图1a所示。非独立悬架左右2 个车轮之间通过1 根轴进行刚性连接,左右2 个车轮的运动是非独立的。非独立悬架每一侧车轮跳起的运动可以看成是绕着另一侧未跳起车轮与地面接触点的圆周运动。非独立悬架车轮跳起的运动姿态[2],如图1b所示。根据图1 可知,独立悬架和非独立悬架车轮跳起的运动形式和姿态是不一样的。进行车轮离地高度测量方法设计时应将独立悬架和非独立悬架车轮跳起运动姿态的不同考虑进去,所涉及的方法最好可以适用于2 种不同悬架的车轮离地高度的测量。
除此之外,在汽车行驶过程中车轮处于滚动状态,并且车轮跳起以后,车身会向车轮未跳起的一侧发生侧倾,导致跳起车轮的姿态也会发生变化。设计的车轮离地高度测量方法应能测量运动车轮的离地高度,并且可以测量车轮在不同姿态下的离地高度。
2 车轮离地高度测量方法模型设计
为了可以采用同一种方法测得安装在不同悬架类型上的车轮的离地高度,需要脱离具体的悬架结构类型,单独对车轮的运动姿态和状态进行分析。单个车轮跳起以后的姿态,如图2 所示,通过对跳起以后的车轮与固定在车轮轴向方向上的2 个激光测距仪的几何位置关系进行解析,设计了适用于独立悬架和非独立悬架的车轮离地高度的测量方法,如图2所示。在车轮中心轴向方向的A、B 处安装2 个激光测距仪,用于测量A、B 处在车轮跳起以后与地面的距离。
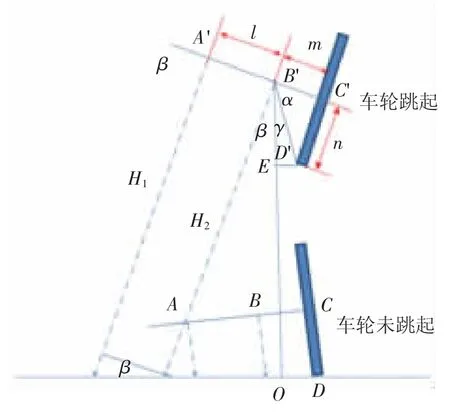
图2 车轮离地高度测量方法设计原理图
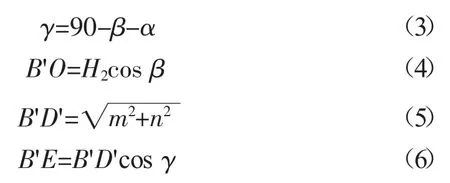
根据图2 的几何位置关系,轮胎外侧最下边缘D'点距离地面的高度计算过程如下:

式中:α——车轮跳起以后,激光测距仪1位置点B' 与轮胎外侧最下边缘点D' 连线与车轮横向轴线的夹角,(°);
β——车轮跳起以后车轮横向轴线与水平面的夹角,(°);
γ——车轮跳起以后,激光测距仪1位置点B' 与轮胎外侧最下边缘点D连线与测距仪1 地面垂直线的夹角,(°)。
轮胎外侧最下边缘D点距离地面的高度值(EO/mm)为:

3 车轮离地高度测量方法的实现以及试验验证
3.1 车轮离地高度测量系统
为了实现设计的车轮离地高度测量方法,文章又设计了车轮离地高度测量系统,如图3所示。将车轮离地高度测量算法通过编程集成在上位机中,通过显示器直接显示测试系统测得的车轮离地高度值。

图3 车轮离地高度测量系统示意图
根据图2 以及式(1)~ 式(8)可知,测量系统最重要的部分是通过专门卡具和支架将激光测距仪1 和激光测距仪2 固定在车轮轴向的横向方向上,2 个激光测距仪输出数据的准确程度将直接影响测得的车轮离地高度的精度和准确性,因此需选用高精度的激光测距仪。同时法规中要求测量的车轮离地高度都是汽车在特定行驶工况下车轮突然跳起的高度,车轮离地高度的测量是在动态情况下进行,因此要求所选用的激光测距仪的响应速度要快。文章选用德国Banner LE550型激光测距仪,其特征参数,如表1所示。

表1 德国Banner LE550型激光测距仪参数
影响车轮离地高度测量系统精度的因素除了选用的激光测距仪的响应速度和精度,还有3 个关键相对位置尺寸,分别为:2 个激光测距仪沿车轮轴向方向的距离(l)、轮胎外侧点D距激光测距仪1 沿车轴方向上的距离(m)和沿轮胎平面的距离(n),这3 个关键尺寸的测量要求尽量精确,否则容易造成系统误差。按照图3 中的车轮离地高度测量系统装配关系测量的l,m,n分别为161.9,170.7,84.8 mm。
3.2 车轮离地高度测量模型试验验证
3.2.1 车轮离地高度测量模型静态试验验证
为了验证所设计的车轮离地高度测量模型的精度以及测量范围是否可以满足鱼钩试验的要求,进行了相应的车轮离地高度测量系统精度的静态测试试验。试验过程如下:首先通过举升器将车轮顶起到不同的高度,用以模拟车轮跳起的不同高度。然后选用精度为0.05 mm 的高度尺测量车轮轮胎外侧最下边缘D点的离地高度,接着通过设计的车轮离地高度测试系统测得该点的离地高度,最后将高度尺测得的结果与所设计的系统测得的结果进行对比。试验过程,如图4 所示,试验结果对比,如表2所示。

图4 车轮离地高度测量系统验证试验

表2 车轮离地高度静态测试试验结果比较 mm
鱼钩试验要求车轮离地高度系统的测量范围为349.25~850.90 mm[3],精度为测量范围的1%(5 mm)。根据表2 可知,所设计的车轮离地高度测试系统测得的数据与高度尺测得的数据相差不大,最大误差值为2.8 mm,小于鱼钩试验对车轮离地高度系统最大误差的要求,说明在静态试验条件下所设计的车轮高度测量系统能够满足鱼钩试验对车轮离地高度测试系统测量范围和精度的要求。
3.2.2 车轮离地高度测量模型动态试验验证
虽然所设计的车轮离地高度测量系统在静态条件下能够满足鱼钩试验的要求,但由于鱼钩试验是在汽车行驶过程中监测车轮的离地高度,该过程中车轮突然抬起的过程会非常短暂,因此要求系统的响应速度要快。为了验证所设计的车轮离地高度测量系统的动态响应及精度,文章进行了相应的车轮离地高度测量系统的动态测试试验。试验过程如下:1 个车轮装有车轮离地高度测量系统的汽车以10 km/h 的速度压过铺在路面上的砖块,轮胎压到砖块以后会被抬起,如图5所示,车轮压过的砖块的宽度较窄,所以车轮压过砖块的过程会比较短暂,装在车轮上的车轮离地高度测量系统记录车轮离地高度变化的过程也会较短暂。由于轮胎是圆形的橡胶弹性体,车轮在爬上和爬下砖块的整个过程中,轮胎与砖块的接触面积会从小变大然后再逐渐变小,轮胎外侧最下边缘的应变变形也随之从大变小再逐渐变大,因此只有在轮胎与砖块接触面最大的时刻,即车轮刚好压到砖块中间位置的时刻,轮胎外侧最下边缘的应变才最小,轮胎抬起的高度在此时最高。砖块的厚度也为轮胎抬起的最大高度。试验测得的车轮离地高度的变化过程,如图6所示。用高度尺测量砖块的高度,如图7所示。高度尺测得数据与车轮离地高度测量系统得到的车轮离地的最大高度数据比对,如表3所示。

图5 车轮匀速压过砖块示意图

图6 车轮离地高度变化过程曲线

图7 高度尺测量砖块高度示意图

表3 车轮离地高度动态测试试验结果比较 mm
根据表3 可知,在动态情况下,车轮离地高度测量系统与高度尺测量的结果最大相差0.7 mm,差值的平均值为0.53 mm。
通过车轮离地高度测量模型动态试验结果可知,所设计的车轮离地高度测量系统在实际车辆运动情况下,同样可以对车轮短暂抬起的高度进行准确的测量,并且重复测量的一致性较好。所设计的车轮离地高度测量系统同样能够满足鱼钩试验对车轮离地高度测量系统精度的要求。
4 结论
文章验证了所设计的车轮离地高度测量方法在汽车行驶过程中车轮突然跳起情况下的测量可行性,并且该方法在原理上克服了悬架类型对测量结果的影响,适用于独立悬架和非独立悬架车轮离地高度的测量。通过试验验证了设计的车轮离地高度测量系统的测量精度和量程都可满足美国NCAP 中鱼钩试验对车轮离地高度的测量范围和精度的要求,对在工程上继续研究车轮的运动状态也有非常重要的参考和借鉴意义。
