基于混合异构计算平台的车辆行驶状态参数实时采集技术
2019-04-06刘永涛赖延年赵俊玮
刘永涛,赖延年,赵俊玮
(长安大学,西安 710064)
车辆行驶状态参数能够表征车辆运行技术状态、车辆行驶特性规律、驾驶员操控车辆的驾驶意图以及驾驶员的驾驶习惯,是研究车辆纵向危险行驶状态辨识机理的重要依据之一。一方面,能够为车辆建立可靠的纵向行驶安全域方案集,并为车辆横向危险行驶状态辨识模型提供基础参数支持;另一方面,车辆行驶状态参数实时采集还能为涉及交通事故各方的事故责任确定以及公安交通管理部门公正执法提供重要参考[1-4]。因此,对车辆行驶状态参数采集的研究和探索具有重大现实意义。
现阶段常见的相关采集系统和采集方法有基于GPS雷达的检测方法[5]、基于CCD视觉传感器的检测方法[6-9]以及基于车辆CAN总线的检测方法[10-11]等。基于GPS雷达的车辆行驶状态参数采集方法采用区位移动测速,即利用GPS天线确定移动车辆空间坐标,再解算某个节点内车辆沿纵向行驶的距离来计算车速,一般以每分钟为一个时间节点进行传输显示。该车辆行驶状态参数采集系统使用便捷,但系统使用成本较高,且不能采集转向信号关键参数。基于CCD视觉传感器的车辆行驶状态参数采集方法利用实时采集的视频图像,通过图像处理算法进行实时结算车速,该方法使用快速、便捷、成本低,但其精确度不能保证,尤其是图像处理算法受光照、天气的干扰较大。基于车辆CAN总线的检测方法通过车辆CAN总线的发射器、接收器及车辆ECU单元传输车辆相关参数,使用CAN采集卡得到车辆行驶状态参数,该检测方法精确度较高,但无法应用于没有装备CAN总线的车辆。针对上述车辆行驶状态参数采集方法的局限性,自行设计并实现了车辆行驶状态参数采集系统,该系统以Freescale公司的MC9S12XS128处理器为核心,通过采集车速脉冲信号,经过光耦隔离、传入至处理器MC9S12XS128进行车辆行驶状态参数解算。
1 面向行驶参数采集的混合异构计算平台硬件设计
车辆行驶状态参数实时采集系统按照功能化、模块化的标准设计硬件,并根据系统计算平台中的不同功能划分为若干子系统:行驶状态参数采集显示系统、微处理器系统、信息交互系统等。由于车辆行驶环境的复杂性,如大风、雷雨、冰雪等恶劣自然天气及道路上下坡环境,车辆行驶状态参数实时采集系统的设计应具有系统的复杂度低、体积便于安装、良好的可靠性、数据采集的精确性及便于系统的后期维护扩展。混合异构计算平台的硬件电路架构如图1所示。

图1 混合异构计算平台的硬件电路架构
1.1 基于微处理器的最小系统设计
混合异构计算平台处理器模块的主要作用是将采集的客运车辆行驶状态的参数信号转变成最小系统能识别的参数数值,将处理后的相关参数通过显示屏显示出来并完成与工控机的数据交互。最小系统主要由四大模块组成,分别是振荡器与时钟电路模块、复位模块、电源模块和处理器模块,其中所选用的MC9S12XS128处理器芯片能满足系统所要求的稳定性、处理能力以及抗干扰能力。
1.1.1 振荡器与时钟电路
时序逻辑电路对于稳定性的要求较高,如果设计不当将有可能对其它电路产生高频信号干扰,因此,选择外部有源振荡器的连接方式,并采用MC9S12系列单片机的参考时钟电路[12]来进行振荡器和时钟电路模块的设计。微处理器的系统振荡器电路模块设计,如图2所示。

图2 微处理器的系统振荡器电路模块设计
同时,硬件平台设计了锁相环滤波电路,主要为保证微处理器稳定可靠运转。如果微处理器系统缺乏滤波电路,可能会造成压控振荡器输出端电压波动频繁,从而导致系统工作不稳。该电路主要是为了滤去电压中的纹波,确保系统供电稳定性。
1.1.2 复位模块
复位模块的主要目的是为了及时纠正系统出现死机或者内部程序运行出现错误的情况,按下微处理器系统的复位开关,复位模块电路会产生低电平使微处理器复位,方便调试。微处理器的系统复位电路模块,如图3所示。
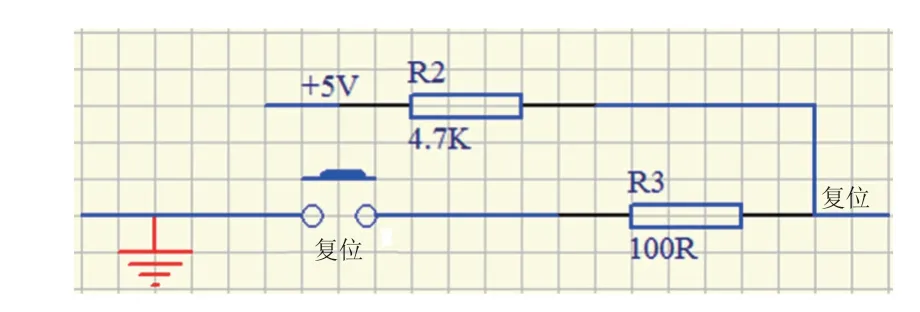
图3 微处理器的系统复位电路模块
1.1.3 电源模块
整个混合异构硬件系统平台需要该模块提供所需电压,电源模块的设计要求所提供的电压稳定,能维持系统正常工作,并能保证系统断电时具有数据保护功能。为避免安装在车辆上的众多电气设备所产生的电磁干扰,在该系统模块中增加滤波电路,以降低电源的高频干扰,通过在电路中加入发光LED,来显示微处理器的通电状态。系统外围电源电路如图4所示。

图4 系统外围电源电路
车辆上所提供的电压一般为24 V或者12 V,因此需设计降压至5 V来满足单片机正常工作的电路,选择具有负载能力大,稳压性能好,转换效率高的LM2596-5芯片进行降压,系统降压电路如图5所示。
1.1.4 处理器模块
处理器模块集成了采集各种参数所需的接口,其中,为编写程序方便,增加BDM编写接口电路。整个电路为了减少布线不精确和装配误差等问题,采用PCB印刷板形式,因此整个电路具有布局紧凑合理、质量轻和外形美观等优点。
1.2 面向车速信号干扰抑制的光耦隔离系统硬件设计
为了消除车速脉冲信号包含的其它冗余干扰,混合异构计算平台系统设计了光耦隔离电路,从而进行精确的车速计算,其中光耦合器起到了隔离输入、输出信号的作用,使信号满足保持单向传输、稳定工作以及抗干扰的要求。光耦隔离电路设计如图6所示。

图6 光耦隔离电路
1.3 体现自组织任务分配的车辆行驶信息采集设计
车辆行驶状态表征参数包括转向灯信号、制动信号以及车速等多种参数。针对车辆纵向行驶安全保障的需求,采集转向信号和车辆速度信号。从车辆仪表盘信号线接入电路可以采集车辆的转向信号,从车速传感器接入电路可以采集到车速信号[13]。因此,只需设计相应的硬件电路,即可把原始的信号形式转化为单片机可识别的参数。利用电压比较器采集转向信号的硬件电路如图7所示,利用车速传感器采集车速信号的硬件电路如图8所示。
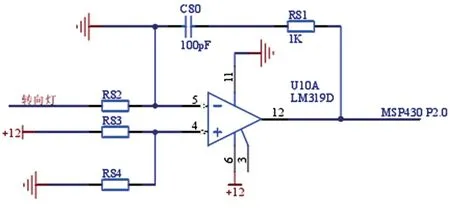
图7 转向信号采集电路

图8 车速信号采集电路
1.4 基于RS-232串行通信协议的数据交互电路设计
为了使所采集的信息可以传输至工控机组件中,采用RS-232串行通信协议实现处理器模块与开发板通信,其中仅使用3根线:RXD、TXD和GND,RXD和TXD引脚分别连接至MC9S12XS128单片机的PS0和PS1引脚。
2 车辆行驶参数采集模块化细粒度算法设计
整个系统平台搭建完成之后,还应确定处理器模块算法,先通过微处理的时钟模块设置系统工作频率,再通过电压比较器设置车辆转向信号判断规则,然后用增强型捕捉定时器模块设置车速脉冲信号统计规则,并基于变速器动力传递原理解算实时车速,最后通过数据交互模块将处理后的行驶参数传至工控机组件硬件平台。
2.1 用于脉冲信号检测的ECT模块算法设计
在进行车速信号检测之前,需设置时钟任务模块,通过对SYNR、REFDV两个寄存器的设置,实现单片机的超频,对应时钟任务模块算法设计流程如图9所示。ECT模块又称增强型捕捉定时器模块,通过级联形成PACA、PACB两个16位通道,设定车速信号触发扑捉方式,对有效触发边沿的次数进行统计,对应ECT模块的设计流程如图10所示。
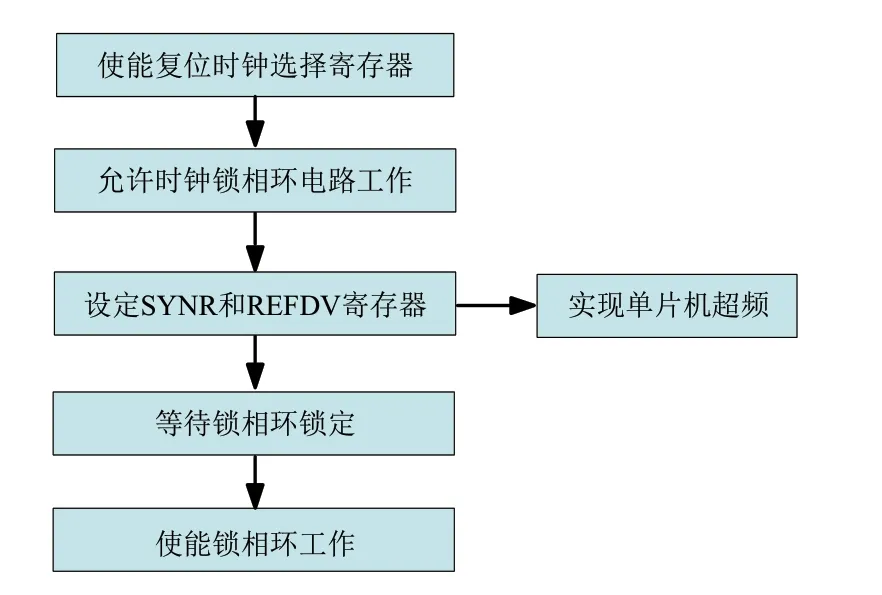
图9 时钟任务模块算法设计流程
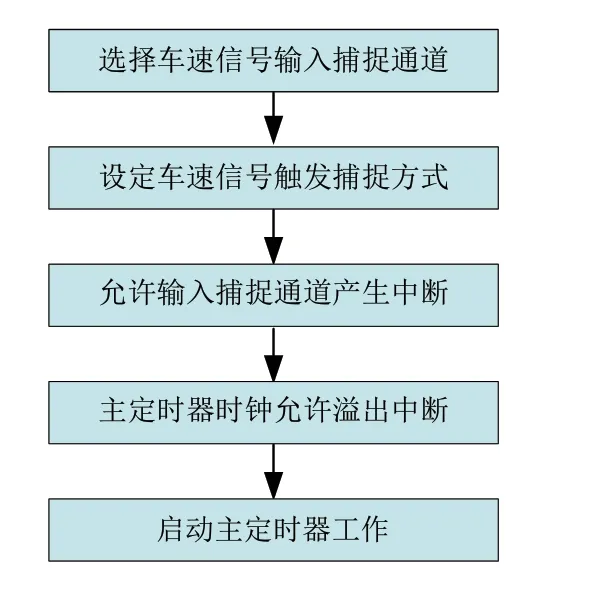
图10 ECT任务模块算法设计流程
2.2 车辆行驶状态参数计算模型构建
直接提取车速传感器在变速器上采集到的车速脉冲信号,根据变速器动力传递原理及相关公式,推算出车辆车轮转速。车辆运行速度计算模型为:

式中:Vc为车速,m/s;i为传动系统主减速比;d为车轮直径,m;n为车辆变速器输出轴转速,r/min。
通过变速器配置说明获取主减速比值,测量得到车轮直径值,脉冲信号检测由单片机中捕捉中断函数获得,变速器输出轴转速通过传感器计算获取,基于动力传递原理,对车辆运行速度进行实时解算。车辆行驶速度解算流程如图11所示。

图11 车辆行驶速度解算流程
2.3 车辆行驶信息交互模块算法设计
车辆行驶参数实时采集系统与工控机通信时需设定相同波特率,通过系统多次试验测试,数据信息传输的最佳波特率为9600 b/s,通过设置SCI控制寄存器的收发方式实现数据交互。基于RS232通信协议的数据交互算法设计流程如图12所示。

图12 基于RS232通信协议的数据交互算法设计流程

表1 采集车速数据与车速表显示数据对比

图13 在环试验数据分析
3 系统硬件在环试验验证
4 结论
对车辆行驶状态参数实时采集系统进行了硬件构建和软件设计之后,为验证其合理性和算法有效性,选取奇瑞某轿车进行系统硬件在环试验,将系统按要求连接好后,开始进行数据采集。采集车速数据与车速表显示数据对比见表1,对应分析如图13所示。
系统硬件在环试验结果表明,本研究所构建的基于混合异构计算平台的行驶参数采集平台能准确采集车辆转向信号,车速采集相对误差平均值为6 %,由于车辆仪表盘本身显示的车速数值要高于实际的车速数值,行业规定一般应高于实际值4 %~10 %[14],因此,该车辆行驶状态参数实时采集系统符合预期需求。
本文通过将MC9S12XS128作为控制器芯片,搭建基于混合异构计算平台的车辆行驶状态参数采集系统,其中包括行驶状态参数采集显示系统、微处理器系统、信息交互系统等。根据不同模块的设计要求,对任务模块化细粒度算法并行设计,通过处理采集的车速信号和转向信号,实时解算车辆行驶状态参数,并将其传送至相应显示平台进行有效性检验。系统平台硬件在环试验结果表明,该系统能有效采集车辆转向信号,车速数据检测相对误差平均值为6%,满足平台工作预期需求,可对车辆行驶状态参数进行实时有效的采集。