典型信号控制交叉口左转电动自行车通行空间交通特性研究及宽容设计方法
2019-04-04韦凌翔廖明军王志远李宇轩王红攝李梦园
韦凌翔,廖明军,2,王志远,庄 帅,李宇轩,朱 军,王红攝,李梦园
(1.盐城工学院 材料科学与工程学院,江苏 盐城 224051;2.道路灾变防治及交通安全教育部工程研究中心,湖南 长沙 410076;3盐城市公安局交通警察支队,江苏 盐城 224002)
电动自行车是指以蓄电池为辅助能源,在普通自行车的基础上安装了电机、控制器、蓄电池、转把等操纵部件和显示仪表系统的机电一体化的个人交通工具[1-2],以其能耗低、无污染以及在城市道路上灵活方便的特点,成为广大市民中短距离出行者的主要选择。随着使用电动自行车群体的急剧膨胀,在城市道路信号交叉口,因电动自行车抢行、侵占机动车行驶空间、占用机动车道行驶等降低了城市路网的通行能力,成为诱发交通事故的重要致因。其中,电动自行车左转的行驶行为因电动自行车车流分散性强、行车曲线不规则、无电动车左转导游线、与左转机动车近距离行驶等,成为城市信号交叉口电动自行车交通事故的关键成因之一。因此,开展城市信号交叉口左转电动自行车行驶安全特性与应对策略研究可以为我国电动自行车交叉口交通设计改善、降低交通事故等提供一定的理论依据和数据支撑。
目前国内外针对电动自行车的研究多从电动自行车的基本特性和交通效率入手,主要成果有:董艳涛[3]通过实际调查数据分析了路段电动车交通流三参数基本关系和交叉口电动自行车的交通特性;叶晓飞等[4]通过对电动自行车与自行车交通特性差异性分析,提出了自行车有效行驶面积的概念;韩宝睿等[5]以交通调查为基本手段,深入研究电动自行车的有关交通特性,通过回归分析等方法,找出电动自行车速度特性的基本规律;卓曦等[6]为提高城市中心商务区电动自行车出行效率,对电动自行车出行诱导技术进行研究;李辉等[7]对自行车与电动自行车对不同轨道交通站点的接驳进行了分析,并对两者的接驳效率进行了对比。综上所述,目前对电动自行车安全性问题的关注相对有限,并且多是从事故特性等角度进行分析[8-11]。
本文在文献[12]、[13]基础上,拟对典型信号控制交叉口左转电动自行车通行空间进行确定,对典型信号控制交叉口左转电动自行车通行空间交通特性数据采集方案进行设计,对典型信号控制交叉口左转同向并行电动自行车横向间距、左转对向行驶电动自行车避让行为特性进行分析,为改善城市信号交叉口左转电动自行车行驶安全特性提供较为可靠、科学的理论和数据支撑。
1 典型信号控制交叉口左转电动自行车通行空间确定与数据采集方案
1.1 典型信号控制交叉口左转电动自行车通行空间确定
目前我国中小城市的道路交叉口控制方式基本采用信号灯控制,大部分交叉口设置了专门的左转信号相位,本文将具有左转信号相位的平面交叉口定义为典型信号控制交叉口。依据《城市道路交叉口设计规程》[14]等规范,通过对盐城市某一道路典型信号控制交叉口平面布局图的机动车车流轨迹、电动自行车左转车流轨迹分析,得到图1所示的典型信号控制交叉口南进口与北进口左转电动自行车通行空间图。
1.2 典型信号控制交叉口左转电动自行车数据采集方案
录像采集法是目前非机动车数据采集中最常用的方法,其优点是存储便捷,而且可以重访获取细节信息。本文以盐城市某个具有左转电动自行车信号的交叉口为研究对象,采用录像采集的方式获取该信号交叉口左转电动自行车行驶安全特性的研究数据,调查时段为某工作日早晚高峰期(7:30—9:30和18:00—20:00),摄像头在交叉口的布设位置如图2所示。

图1 典型信号控制交叉口(南进口和北进口)左转电动自行车通行空间图Fig.1 Traffic Space map of left-turn electric bicycle for typical signal control intersection

图2 典型信号控制交叉口左转电动自行车通行空间图Fig.2 Left-turn electric bicycle space map at typical signal-controlled intersection
由于该交叉口是电动自行车交通事故的多发地点,本文选取该交叉口东西南北4个方向左转电动自行车的车流数据为研究对象。该交叉口左转电动自行车横断面情况为:非机动车(电动自行车)进口车道宽度5.0 m,有机动车和非机动车分隔带;非机动车(电动自行车)出口车道宽度3.0 m,无机动车和非机动车分隔带。
现以拍摄的北进口左转电动自行车为例:摄像机架设在南进口与东出口相接处且靠近人行道边上,并调高三脚架的位置,目的是为了避免行人出现在拍摄镜头之中,影响视频拍摄的效果和获取数据的精度。当摄像机架设完好后,需要进一步调整摄像机镜头的角度,以兼顾北进口同向左转电动车之间的距离和南北进口对向左转电动车之间的距离,确保它们都在摄像机拍摄的范围之内。拍摄其他进口的摄像机可以参照上述方法进行摆放。
通过上述视频拍摄进行数据采集后,利用After Effect软件和SIMI Motion三维运动分析系统获得该交叉口非机动车左转交通流的速度及运动轨迹数据,便于后面的分析计算。
2 典型信号控制交叉口左转电动自行车通行空间交通特性分析
2.1 典型信号控制交叉口左转同向并行电动自行车横向间距分析
电动自行车骑行时具有摇摆性,属于非自平衡系统。在电动自行车左转过程中,为保证骑行安全,电动自行车与同向的电动自行车、机动车之间通常保持一定的横向安全间距。本文借助After Effect 软件分别对不同进口道的同向并行电动自行车横向间距、电动自行车与同向机动车的横向间距进行统计,调查样本量均为200个,具体的统计概率累计分布如图3所示。

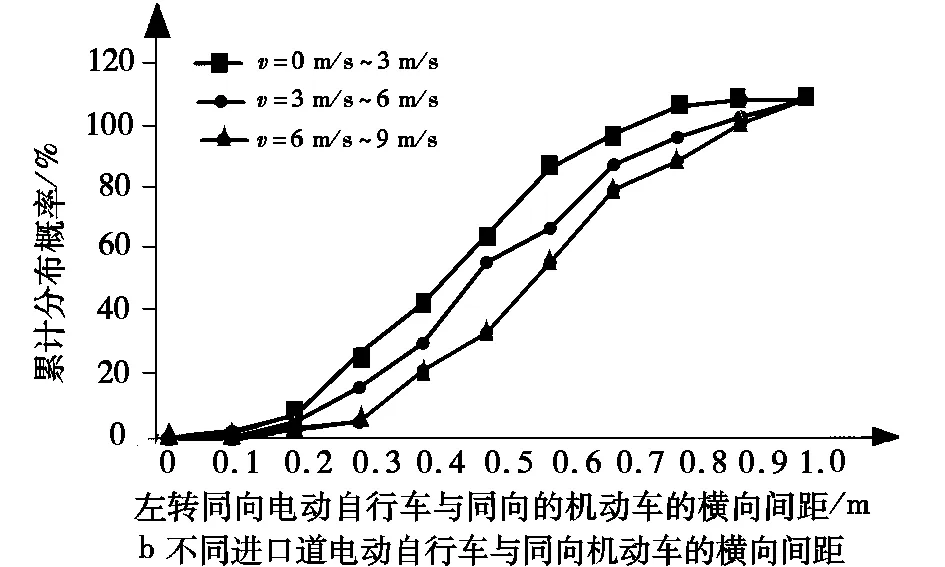
图3 左转电动自行车与同向的电动自行车、机动车之间横向间距累计分布概率统计图Fig.3 Probability and statistics graph of cumulative distribution of lateral distance between left-turn parallel electric bicycles
通过对图3的统计分析可以发现:①从整体上看,相同行驶速度时,同向并行的电动自行车横向间距小于电动自行车与同向的机动车的横向间距,这主要是由于电动自行车行驶者为左转的安全性考虑而尽量远离处于强势地位的机动车,同时也说明同向并行的电动自行车横向间距更小,相互之间碰撞、刮蹭的概率更大;②对于不同进口道的同向并行电动自行车横向间距而言,横向间距分布主要集中在0.2~0.7 m之间,电动自行车速度分布主要在0~9 m/s之间,且电动自行车速度越高,横向间距越大,以避免同向左转电动车之间的碰撞;③对于不同进口道的电动自行车与同向机动车的横向间距而言,其横向间距分布主要集中在0.3~0.8 m之间,比同向电动车的横向间距有所增加,电动自行车速度分布在0~9 m/s之间,且电动自行车速度越高,电动车为求平衡所需的横向距离越大。
2.2 典型信号控制交叉口左转对向行驶的电动自行车避让行为分析
信号控制交叉口左转对向行驶电动自行车避让行为是指对向进口道(东西进口道或者南北进口道)左转电动自行车同时放行时,由于交叉口空间和电动自行车流量较大等问题,为防止电动自行车发生碰撞,在保证自身安全的前提下进行的避让行为。由于电动自行车的灵活性比较大,且高峰时段电动车流量较大,因此电动车避让行为经常发生。通常电动车的避让的行为可分为3个阶段,分别为匀速反应阶段、减速避让阶段和加速离开阶段,具体过程如图4(以东西进口道为例)所示。

图4 左转对向行驶电动自行车避让行为示意图Fig.4 Schematic diagram of the avoidance behavior of the opposite-direction left-turn electric bicycle
由于左转对向行驶电动自行车避让行为发生的概率与左转电动自行车流量有很强的相关性,据此提出左转对向行驶电动自行车避让行为的调查方法为:①统计一个信号周期内左转相位下进入交叉口的车辆数(以进入左转进口道停车线为计数标准);②统计在这个信号周期内左转相位下避让行为的车辆数;③计算单位时间内左转相位下进入交叉口的车辆数,即用统计的一个信号周期内左转相位下进入交叉口的车辆数除以这个信号周期内左转相位时间(单位:辆/s);④在平峰和高峰时段内重复①~③得到足够的统计样本数;⑤对采集的数据绘制成以单位时间内左转相位下进入交叉口的车辆数为横坐标、左转相位下避让行为车辆数为纵坐标的散点图。按照上述步骤得到如图5所示的左转对向行驶电动自行车避让行为分布图(包括东西方向与南北方向)。

图5 左转对向行驶电动自行车避让行为分布图Fig.5 Distribution map of the avoidance behavior of the opposite-direction left-turn electric bicycle
通过对图5分析发现:①在单位时间电动自行车流量≤0.52辆/s(对应调查交叉口一个信号周期内左转电动自行车数为13)时,单位时间电动自行车流量与左转相位下避让行为的个数呈线性正相关关系,但是随着单位时间电动自行车流量的逐渐增加,左转相位下电动自行车避让行为个数稍有增加,主要原因为此时左转电动自行车数量相对较少,即左转电动自行车车流密集程度不高时,电动自行车之间的相对行驶空间较大,左转同向电动自行车相对自由行驶,可忽略相互之间的干扰;②在单位时间电动自行车流量>0.52辆/s时,单位时间电动自行车流量与左转相位下避让行为个数以“6辆”为均值呈上下波动规律分布,主要原因为此时电动自行车左转数量较多,车流密度较大,其相对行驶空间受到约束,左转同向电动自行车之间呈跟随行驶,后面电动自行车的避让行为易受到前面电动自行车的影响,从而使得随着单位时间内电动自行车流量的增加,左转相位下的避让行为受到波动。
3 典型信号控制交叉口左转电动自行车通行空间宽容设计方法
根据典型信号控制交叉口左转同向并行电动自行车横向间距、左转对向电动自行车避让行为的分析,提出城市信号交叉口左转电动自行车通行空间宽容设计方法与原则如下:
(1)左转电动自行车进、出口车道宽度与其横向驾驶特性相匹配
典型信号控制交叉口电动自行车左转时,由于脱离交叉口进口左右路缘石的约束,电动自行车在左转的过程中横向分布离散性逐步加大,有效降低了同向并行电动自行车相互发生碰撞、刮蹭的概率。因此,在确定左转电动自行车进、出口车道宽度的时候从保证电动自行车安全行驶的角度考虑,应该满足交叉口电动自行车出口道宽度大于交叉口电动自行车进口道宽度,即图6中的L2>L1(L2、L1分别表示交叉口电动自行车出口道与进口道的宽度)。

图6 左转电动自行车进、出口车道宽度与其横向驾驶特性相匹配的设计图(以南进口为例)Fig.6 The design map of the width of the inlet and exit lanes matching the lateral driving characteristics of the left-turn electric bicycles (take the South entrance as an example)
(2)对同一进口道左转机动车与左转电动自行车进行空间上的分离
典型信号控制交叉口电动自行车左转时,同一进口道左转机动车与左转电动自行车并行,存在很大的安全隐患。因此在空间上对同一进口道的电动自行车与同向行驶的机动车进行适当分离可有效降低电动自行车与同向机动车之间发生刮蹭的概率。因此,本文建议依据交叉口左转机动车车辆轨迹设置左转机动车导行线来分离同一进口道左转机动车与左转电动自行车,具体方案如图7所示。

图7 交叉口左转机动车导行线设计图Fig.7 Design drawing of left-turn motor vehicle guide line
(3)对同时放行的不同进口道的左转电动自行车进行空间上的分离
典型信号控制交叉口电动自行车左转时,同时放行的同一进口道的左转电动自行车在交叉口中心位置存在一定的避让行驶现象,造成很大的安全隐患。因此,将左转对向行驶的电动自行车进行空间上的分离可有效降低左转对向行驶电动自行车交通碰撞事故的发生概率。
由于信号控制的交叉口一般都是东西方向、南北方向左转分别同时放行,因此,本文建议依据左转电动自行车的车流轨迹在交叉口设置“菱形渠化岛”,来满足空间上对同时放行的不同进口道的电动自行车进行分离的原则,具体设置方法如图8所示。

图8 交叉口“菱形渠化岛”设计图Fig.8 The design map of "rhombus channelization island" at the intersection
(4)交叉口左转电动自行车安全行驶保障性宽容策略
除了上面提到的左转电动自行车进、出口车道宽度与其横向驾驶特性相匹配、对同时放行的同一进口道的电动自行车进行空间上的分离、对同时放行的不同进口道电动自行车进行空间上分离的原则外,由于电动自行车在左转过程中存在超车行为、车速过高、行车曲线不规则、不遵守交通规则等问题,提出交叉口左转电动自行车安全行驶保障性宽容策略如下:①禁止信号交叉口电动自行车左转超车行为;②在信号交叉口进口道设置电动自行车慢行标志;③鼓励信号交叉口左转电动自行车进行二次过街;④严格监管电动自行车左转过程中的违法越线行为;⑤大力宣传遵守交通规则重要性。
4 结论
通过对典型信号控制交叉口左转电动自行车通行空间交通特性的研究,得出主要结论如下:
(1)电动自行车在典型信号交叉口左转时,在同一行车速度同一累计频率下,同一进口道左转同向电动自行车与机动车之间的横向距离要大于不同进口道同向左转电动自行车之间的横向间距。因此,不同进口道左转电动车更应注意与同向电动车之间的碰撞与摩擦,避免交通事故发生。
(2)当单位时间电动自行车流量≤0.52辆/s时,单位时间电动自行车流量与左转相位下避让行为个数大致呈线性正相关关系;当单位时间电动自行车流量>0.52辆/s时,左转电动车相对会选择跟随并匀速行驶,此时对向左转电动车的避让车辆数相对稳定,即在某一数值处上下波动,而不会随着车流量的增加有太大的变化。
(3)同向左转电动车的速度大多分布在0~9 m/s。随着左转电动车速度的增加,同向左转电动车为维持行车安全,电动车的横向间距会随车速不同而有所变化,但左转电动车行驶速度越高,同向电动车之间的间距就趋向越大。同理,同向左转电动车与机动车之间也有类似的规律。
