认知雷达波形和检测门限自适应跟踪算法
2019-04-04王树亮毕大平张奎金培进陈小坤
王树亮,毕大平,张奎,金培进,陈小坤
(1.国防科技大学电子对抗学院,230037,合肥;2.73676部队,214400,江苏江阴;3.31603部队,221003,江苏徐州)
雷达目标跟踪是一个典型的不确定性问题,其不确定性主要来源于两个方面[1]:①目标运动的不确定性,常用的跟踪模型[2-3]有匀速(CV)模型、匀加速(CA)模型、当前统计(CS)模型、Jerk模型和交互式多模型(IMM)等;②目标量测的不确定性,不同发射波形具有不同的量测误差协方差[4],而且由于杂波的影响,目标量测的起源也充满诸多不确定性由此带来了数据关联问题[5-6],常用的数据关联算法有最近邻(NN)法、概率数据关联(PDA)法、优化的概率数据关联(OPDA)法等。
从系统观点出发,雷达信号检测门限将影响接下来的跟踪过程,因此有必要考虑联合检测跟踪系统框架[7]。检测门限的选择需要在虚警和漏警之间取得一个折中。从整体跟踪性能出发,Gelfand等人在联合检测跟踪框架下,结合PDA滤波研究了检测门限优化问题,并分别给出了先验和后验检测门限优化的具体实现方法[8],但该研究主要是在给定量测误差协方差下进行的,并没有考虑波形对量测误差的影响。
Kershaw和Evans利用在原点处雷达波形模糊函数的Fisher信息矩阵,得到了量测误差和波形参数的关系,并结合PDA滤波研究了波形优化的准则[9-10]。目前,在波形自适应雷达目标跟踪研究中存在两种趋势:一种是不考虑检测问题,基于理想匹配滤波,直接用原点处雷达波形的模糊函数得到的CRLB来表示量测误差协方差[11-13];另一种是考虑检测问题,基于时延-多普勒分辨单元理论研究波形优化或联合波形、检测门限优化等问题[14-17]。Rago等明确定义了距离和多普勒分辨单元,并深入分析了平均检测概率、虚警概率和量测误差协方差的表示[14]。Niu等对分辨单元理论进一步扩展,并研究了不同波形对跟踪性能的影响[15]。Wang等研究了波形和检测门限的自适应问题,给出了包含波形和检测概率的量测误差协方差推导公式[7],但在实际应用时平均检测概率和量测误差协方差需要进行积分运算,计算较为复杂。Hong等在信噪比足够大时,给出了平均检测概率的近似表达式,并推导出单个高斯线性调频(LFM)脉冲的误差协方差阵近似表达式[16],其结构相对简单。
此外,受人类感知动作循环(PAC)、记忆、注意和智能等认知机制的启发,Haykin及其团队首次明确提出认知雷达及认知跟踪雷达的概念[18-19],其基本思想就是能够通过雷达对目标和环境的实时感知来自适应地选择发射波形,从而建立了联合雷达接收端和发射端的闭环跟踪回路。为此,本文基于认知雷达PAC闭环回路跟踪思想,提出用滤波误差的协方差来描述目标跟踪的不确定性,并基于时延-多普勒分辨单元理论,给出单个高斯线性调频(LFM)脉冲量测误差的近似表达式,从而构建了联合波形和检测门限自适应的跟踪算法框架,相较传统固定模型参数算法,其杂波背景下机动目标跟踪的不确定性得到明显改善。
1 雷达目标跟踪模型
1.1 状态模型
非合作目标运动的离散状态方程表示为[2-3]
(1)

1.2 量测模型
目标的量测方程为
Yk=HkXk+Vk,φ
(2)
1.3 信息熵不确定模型
目标运动和环境变化构成了一系列的不确定性问题,从信息论的观点出发,可以将雷达对目标运动特性的感知用信息熵来表示[19]
Ek=f(p(XkYk))
(3)
式中:Ek为k时刻贝叶斯后验概率p(XkYk)的熵。雷达对目标状态Xk的感知信息熵表示为
(4)
如果跟踪模型绝对准确且环境为理想环境,即p(XkYk)趋近于1,此时信息熵Ek趋近于0,但实际上由于环境和目标运动的不确定性永远存在,100%的精确也不存在,所以熵的值不可能为0。评价一个模型跟踪性能的好坏可以由信息熵来表征,其值越大,性能越差,反之则性能较佳。认知雷达的显著特点就是将信号处理与数据处理结合起来进行研究,而感知信息熵可以作为它们联系的一个桥梁。文献[19]给出了信息熵的简化等价表达式
(5)
2 基于分辨单元理论的量测误差
2.1 信号波形结构
设一个窄带发射单脉冲信号[9]
(6)

(7)
2.2 匹配滤波和信号检测
(8)
该幅度平方服从指数分布,其均值为
(9)

PF=e-2γ/N0
(10)
(11)
2.3 单个高斯LFM脉冲信号的量测误差协方差
信号基带包络选取高斯包络LFM信号
(12)
式中:λ为信号的有效持续时间;b为频率调制斜率。有效脉冲长度Ts由高斯脉冲幅度下降到峰值脉冲幅度的0.1%确定[10],Ts=7.433 8λ。在不损失一般性的情况下,考虑一个匹配0延迟和0多普勒频移的滤波器,即t0=0,w0=0,此时式(11)的检测概率可表示为
(13)
高斯包络信号的归一化模糊函数可表示为[16]
(14)
通常延迟-多普勒中的分辨率单元为包含一个高于一定水平检测门限的区域。该区域可以用模糊函数和相应的参数d2(模糊函数的等值线)来表示
RC=(τ,ω):A(-τ,ω)≥e-d2/2
(15)
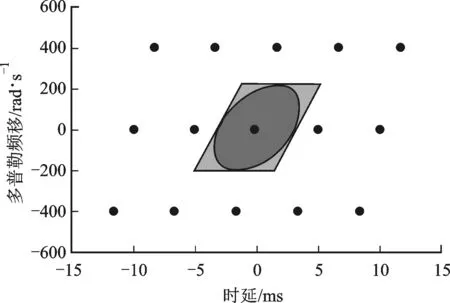
图1 时延和多普勒分辨单元
高斯包络LFM脉冲的分辨单元形状为椭圆,如图1所示,为了简单起见,取与等值线椭圆相切的四个边围成的区域称作分辨单元。图1中的点是采样网格,并且对于每个采样点,滤波器与对应的时间延迟和多普勒频移的包络函数s(t)的副本相匹配;阴影区域指示在原点上的采样点的检测概率高于任何其他采样点的区域;椭圆是区域RC;平行四边形表示分辨率单元C。经推导[16],分辨单元的面积为4d2,对于高斯信号这样的采样间隔在时延多普勒域对应的分辨单元的面积应为|Cτ-ω|=2,所以d2=1/2。
假设单元内的量测为均匀分布,则平均检测概率可表示为
∬PD(τ,ω)dτdω
(16)
式(16)的积分区域为分辨单元面积|C|,此外文献[16]经过推导认为:假设信噪比RSN足够高,平均检测概率可近似表示为
(17)

(18)

(19)
此时观测量的量测误差协方差可表示为
(20)
3 自适应波形和检测门限跟踪算法
3.1 椭圆(球)关联波门[20]
假设目标新息为vk,量测和预测量测中心分别为Yk和Ykk-1,新息协方差为Sk,则当量测Yk满足下式时
(21)
(22)
3.2 滤波误差协方差
利用PDA算法对落入波门内的候选回波进行滤波时,其k时刻的滤波协方差为
Pkk(θk,γk)=Pkk-1-(1-εk,0)Kk(θk,γk)·
(23)


(24)

(25)
3.3 波形和检测门限自适应及跟踪流程
波形选择的代价函数主要有基于控制理论的最小化均方根误差和基于信息理论的最大化目标预测状态与量测状态的互信息两种方法[21]。文献[21]经过推导,得到最大化目标预测状态与量测状态的互信息与最小化滤波误差协方差矩阵的行列式是等价的结论。对照式(5)不难发现,基于互信息最大代价函数与最小化感知信息熵是等价的,因此本文基于信息理论,采取最小化信息熵(滤波误差的行列式)为代价函数,此时最优波形参数和检测门限应满足
(26)
式中:Γ表示滤波结构;Θ表示波形集(或波形参数集);Υ表示检测门限集。因为PF与检测门限γ是一一对应的,即PF=PF(γ),所以对检测门限优化实际上可以看成是对PF的优化,即
(27)

图2 自适应波形和检测门限跟踪系统流程
本文基于认知雷达PAC闭环回路思想,给出了自适应波形和检测门限跟踪系统流程框架,如图2所示。其跟踪结果与雷达量测有关,而其量测主要是根据最小信息熵准则来自适应调整雷达发射波形和检测门限而得到。
4 仿真实验
机动模型选取CS模型[2],其最大加速度设为50 m/s2,机动频率常数选为1/20,采取PDA滤波算法进行M次Monte Carlo实验,评价指标:①估计精度,采用距离、速度和加速度估计均方根误差(RMSE)和均方根误差的均值(ARMSE);②不确定性信息熵。
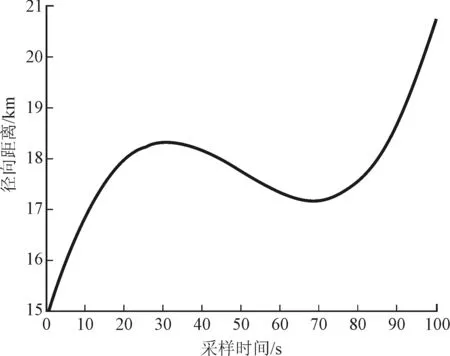
图3 目标径向距离随采样时间的变化情况
雷达波形参数:假设雷达发射波形为X波段,载频为10.4 GHz,发射信号采用式(12)所描述的波形,其中波形库内脉冲有效持续时间λ选择范围为[4×10-6,18×10-6]s,间隔为2×10-6s;为便于比较,调频斜率b设为0,各波形具有相同的能量。在距离r处雷达信噪比设为η(r)=(r0/r)4,r0假设为30 km。
对比以下3种算法的跟踪性能:①固定波形参数为λ=6×10-6s,固定虚警概率PF=0.01;②固定波形参数为λ=6×10-6s,采取门限自适应算法,其中PF∈[0.01-0.1],间隔取0.01;③采取联合波形和检测门限自适应算法。进行200次Monte Carlo仿真实验,图4为3种算法的距离、速度和加速度估计RMSE对比情况。图5为平均信息熵对比曲线。图6为算法2、算法3平均虚警概率自适应选择情况。图7为平均脉冲持续时间自适应选择情况。
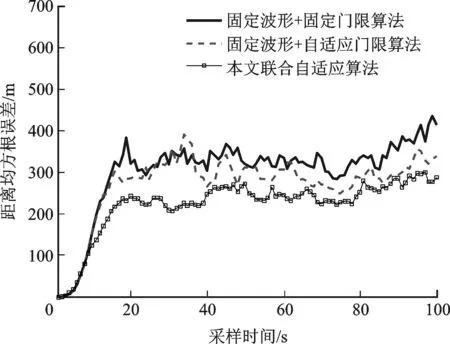
(a)距离估计
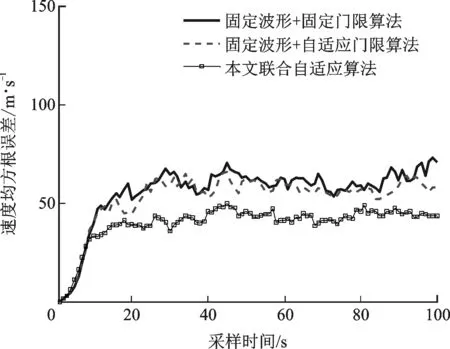
(b)速度估计
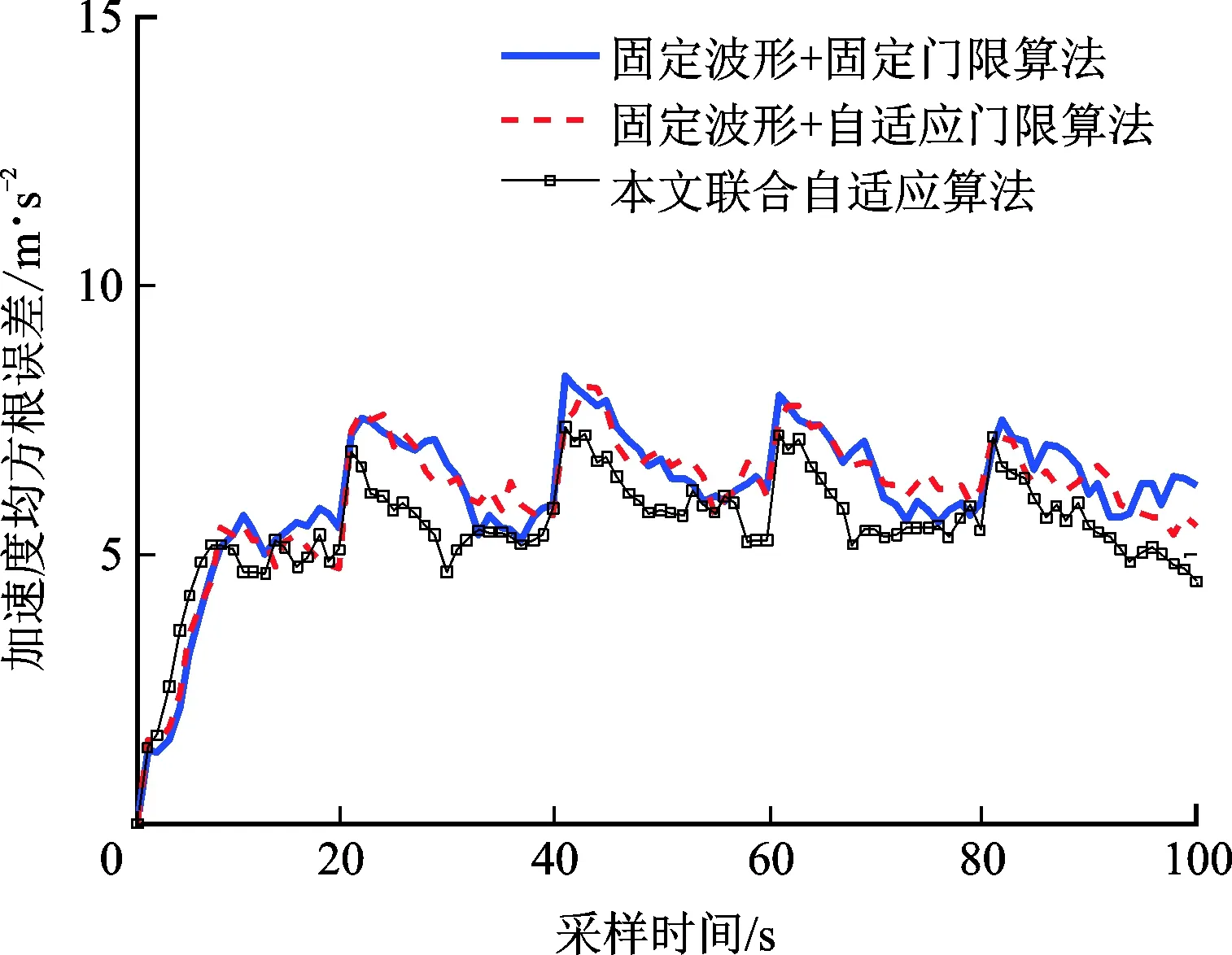
(c)加速度估计图4 不同算法估计的距离、速度和加速度均方根误差对比

图5 不确定性信息熵对比
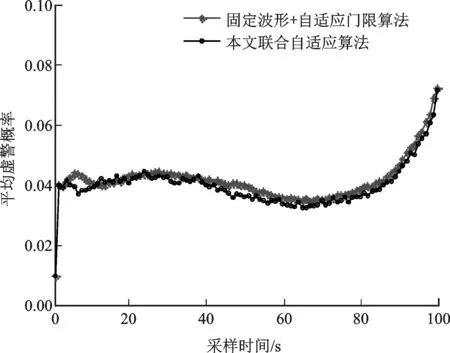
图6 平均虚警概率变化情况

图7 平均脉冲有效持续时间自适应选择情况
由以上仿真实验结果可以得到以下结论。
(1)由图4中3种算法估计均方根误差对比曲线可知:当不考虑波形参数变化,即假定脉冲持续时间为固定值时,自适应门限算法无论是距离、速度还是加速度估计误差都要小于固定门限算法(其距离、速度、加速度估计均方根误差分别为275.4 m、52.15 m/s、5.93 m/s2,而固定门限算法对应估计误差分别为299.6 m、54.88 m/s、6.02 m/s2),从信息熵的角度看,其估计的不确定性较固定门限算法减少约11%。由图3、图6可以看出,平均虚警概率变化趋势总体上与目标的径向距离变化相同,即距离越远,平均虚警概率越大,反之越小。主要原因是当目标越来越远离雷达时,信噪比减小,检测概率减小,此时需要增大虚警概率使落入关联波门的有效量测增加以避免发生漏警。同样地,若目标靠近雷达时,信噪比增加,要减小虚警概率,使落入关联波门内的有效量测减少以提高跟踪精度。
(2)本文提出的波形和检测门限联合自适应算法总体性能要优于仅检测门限自适应算法(其距离、速度、加速度估计均方根误差均值分别为219.9 m、40.11 m/s、5.55 m/s2),从信息熵的角度看,其估计不确定性较仅检测门限自适应算法减少约31%。从图6可以看出,两种自适应算法的平均虚警概率具有相近的变化趋势。从图7可知,在跟踪前期其速度变化明显,机动性强,需要有较高的速度测量精度,因此选择大脉冲持续时间,随着稳定持续地跟踪,脉冲持续时间在最大值和最小值之间交替,其平均持续时间趋于稳定的中间值。
5 结 论
本文基于认知雷达PAC工作机制,提出一种基于雷达波形和检测门限联合的自适应跟踪算法。利用信息熵来描述目标跟踪的不确定性,基于时延-多普勒分辨单元理论,给出单个高斯线性调频脉冲包含波形和虚警概率参数的量测误差协方差的近似表达式,并以信息熵最小为准则建立了雷达发射端和接收端闭环检测跟踪系统。仿真结果表明,本文算法较传统固定模型参数算法对目标跟踪的不确定性得到明显改善。
