基于摩擦起电和静电感应控制的机器人触觉系统
2019-04-02张善淳罗嘉诚
张善淳, 邱 宇, 李 冰, 罗嘉诚, 陈 辉
(大连理工大学 物理学院, 辽宁 大连 116024)
0 引 言
触觉是机器人获得环境信息的一种重要知觉形式,其主要目的是通过对机器人与对象、环境相互作用时的一系列物理特征量进行检测,获取对象与环境信息或完成某种作业任务,是机器人实现与环境进行直接作用的重要媒介[1-4]。自上世纪70年代提出以来,研制满足要求的触觉传感器一直是机器人发展中的技术关键之一[5-6]。机器人触觉系统主要采用力传感器、温度传感器和磁传感器等[7-9],这些传统的触觉传感器通常结构复杂、体型庞大、难以安装,并且通常需要连续激励才能正常工作,以至于所取得的成果大多停留在实验室阶段,不能很好地渗透到日常生产中去。因此,希望能够通过研制一种新型触觉传感器克服普通传感器的种种缺陷,使之更容易地融入到基础生产生活中去。
近年来,王中林开发了一种微型摩擦发电机(Triboelectric Nanogenerator,TENG),它能够利用摩擦生电和静电感应原理将环境中的机械能(例如:人的行走/胳膊摆臂、气流运动、流水等)转换为电能。TENG具有绿色环保、安全性好、体积质量小、成本低等突出优点,因此使其在可穿戴传感器、自驱动触感器等方面很大的潜力[10-18]。本文介绍一种基于摩擦生电和静电感应原理为基础控制的自驱动触觉传感器,它具有结构明易、操作简单,能够自锁运行等优点,并且该结构使机器人拥有薄而柔的触觉面,让机器人能够大面积触觉感知外界环境的出发信号,从而使该机器人触觉系统能够应用于许多现有系统不适用的复杂场合和更恶劣环境中,提升了机器人触觉系统的实用性和应用范围。
1 触觉系统结构与工作原理
1.1 基于摩擦感应控制机器人触觉系统的结构
本机器人触觉系统的基本结构由摩擦静电感应模块、控制电路模块和工作电路模块三部分组成。其中,摩擦静电感应模块由两组摩擦片构成,分别与控制电路的自锁和解锁触发端相连,在外界提供激励时产生电信号,以起到激活对应电路的作用。控制电路模块直接与工作电路模块相连,在接受到摩擦片的电信号后激活对应的功能:自锁触发端可以使电路开始并自锁运转;解锁触发端可以解除自锁状态,使电路停止工作。工作电路模块依据所需功能进行相应选择,在自锁激活后依靠电源持续运转。其工作方式如图1所示,分为“单电极触发”和“双电极触发”两种方式,这两种方式在结构上略有不同,但触觉系统的工作原理完全相同。
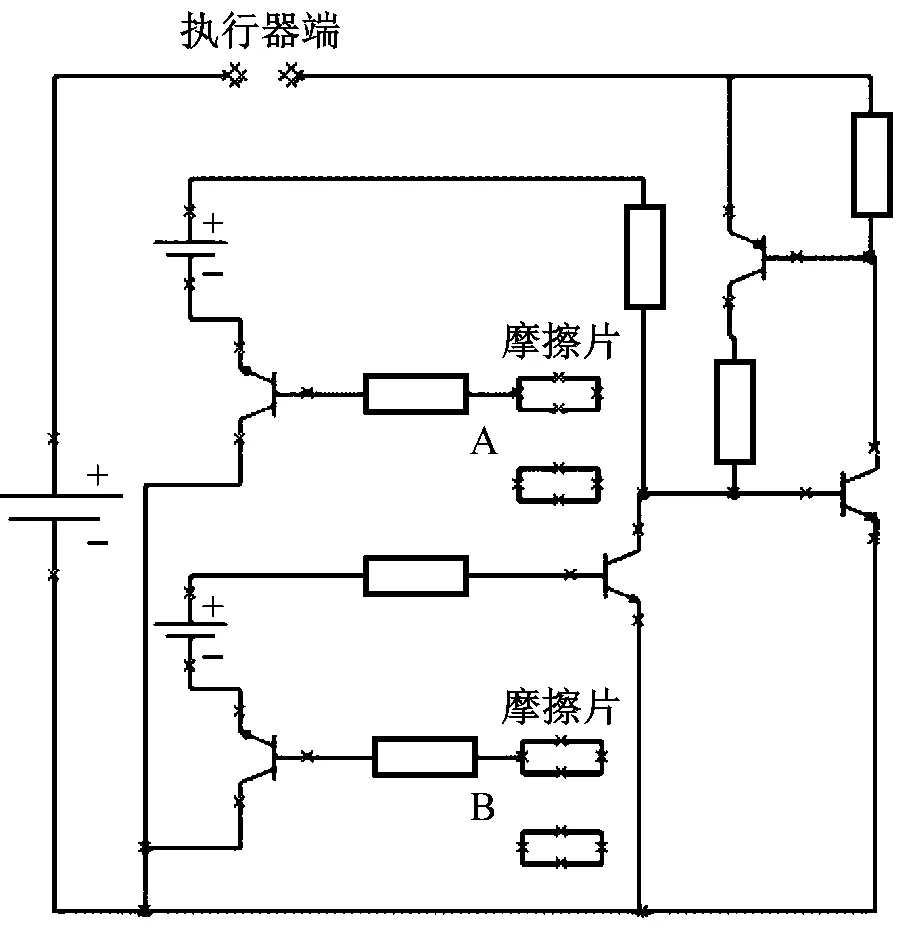
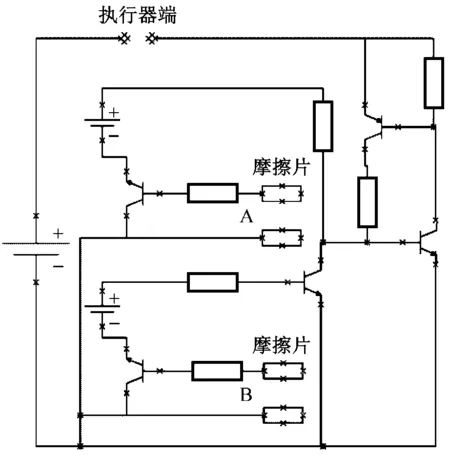

(a) 单电极触发型(b) 双电极触发型
图1 两种电极触发结构示意图
1.2 工作原理
1.2.1摩擦起电和静电感应的工作原理
摩擦起电和静电感应是王中林教授在2012年提出的摩擦纳米发电机的原理,其主要是利用摩擦起电和静电感应的耦合将机械能转化为电能。图2是摩擦静电感应工作原理示意图。本系统中,两个摩擦片可以采用摩擦电极序差异较大的两种材料,例如本系统中分别采用聚四氟乙烯和铜箔作为摩擦层。当材料1和2相互接触摩擦时,由于结构内部两层摩擦层之间的摩擦电极性差异而引起电荷转移,进而利用静电感应作用会形成电势差[19-20]。当摩擦片分离后,具有相反电荷的两个表面自动分开。为了平衡该电势,通过静电感应在背部电极板上感应出相反电性的电荷。由于两个感应电极极板通过导线连同,在外部电路形成瞬间电流。通过两摩擦片接触、分离产生的摩擦电信号或相互靠近、远离时产生的感应电信号作为触发信号作用于控制电路,控制工作电路开启或关闭,进而控制机器人做出指令动作。
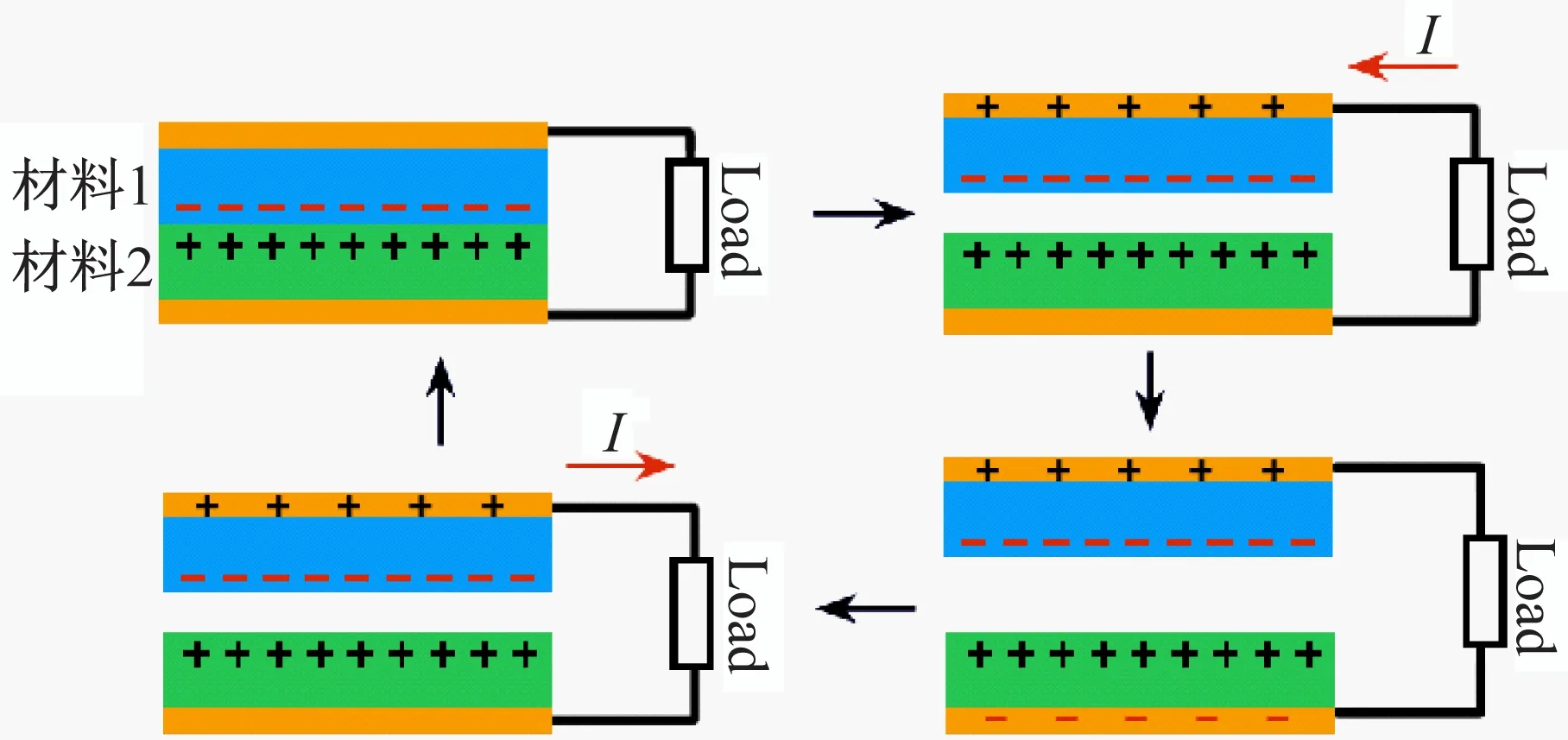
图2 摩擦起电和静电感应工作原理示意图
1.2.2控制电路的具体结构和工作原理
控制电路图如图3所示,包括自锁电路模块(粉色框部分):由PNP 型三极管Q1、NPN 型三极管Q2、分压电阻R1和R2组成。具体结构:Q1的集电极通过R1与Q2的基极相连,Q2的集电极通过R2与Q1的发射极相连,Q1的基极通过导线与Q2的集电极相连;自锁触发电路模块(红色框部分),由NPN 型三极管Q3、电源E1、分压电阻R3和R4,以及自锁触发端A 端构成,具体结构:Q3基极通过R4与自锁触发端A 端相连,发射极与电源负极相连,电源正极通过R3与Q2基极相连。
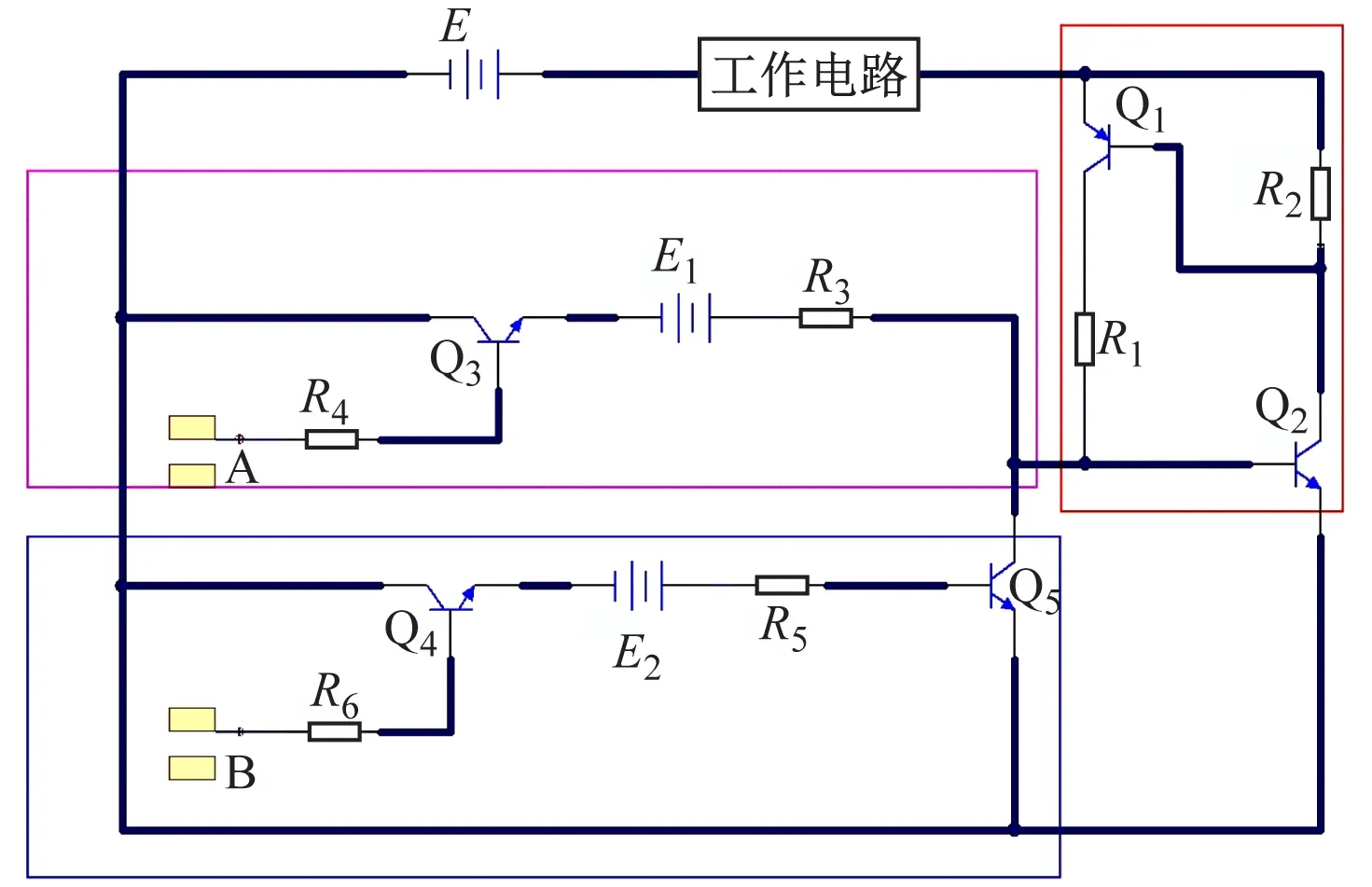
图3 系统中控制电路电路图
解锁触发电路模块(蓝色框部分):由NPN 型三极管Q4、NPN 型三极管Q5、电源E2、分压电阻R5和R6,以及解锁触发端B 端构成,具体体结构为:Q4的基极通过电阻R6与解锁触发端B 端相连,管发射极与源负极相连,电源正极通过电阻R5与Q5的基极相连,Q5的集电极与Q1基极相连。工作时,该自驱动系统采用的控制方法包括如下步骤:
(1) 自锁触发阶段。与自锁触发端相连的一对摩擦片通过上述原理作用于自锁触发端A,使Q3基极产生高电势,Q3导通,使Q2基极形成高电势,Q2导通,完成自锁触发。
(2) 自锁阶段。在Q2导通的基础上,Q2基极的高电势会引起Q1基极点位被拉低,同样满足导通条件,于是Q1导通,之后,PNP型三极管Q1会持续给NPN型三极管Q2提供高电势,使Q2保持导通,实现自锁。
(3) 解锁触发阶段。与解锁触发端相连的一对摩擦片通过上述原理作用于控制电路解锁触发端B 端,解锁触发电路模块中NPN 型三极管Q4基极产生高电势,三极管Q4导通,解锁触发电路模块中NPN 型三极管Q5基极产生高电势,三极管Q5导通,自锁电路模块中NPN 型三极管Q2基极电位被拉低,完成解锁触发。
(4) 解锁阶段。自锁电路模块中NPN 型三极管Q2基极电位被拉低,PNP 型三极管Q1基极形成高电势,三极管Q1和Q2均截止,实现解锁。
2 实际应用
摩擦纳米发电机是一种可以将极其微小的机械能转换为电能的一种新型发电装置,因此在新型触觉系统中,应用此原理的摩擦片也可以通过极弱的碰撞、摩擦等接触或摩擦片的短程接近或远离发出能够驱动系统的电信号。图4为使用手指周期性按动摩擦片时所产生的电信号大小得到交流信号,电压输出值约为10 V,足以达到使系统实现自驱动运行的电压值,可见,基于此触觉系统无需高额能量供给就可以正常运作,能够应用于多种日常生活中。
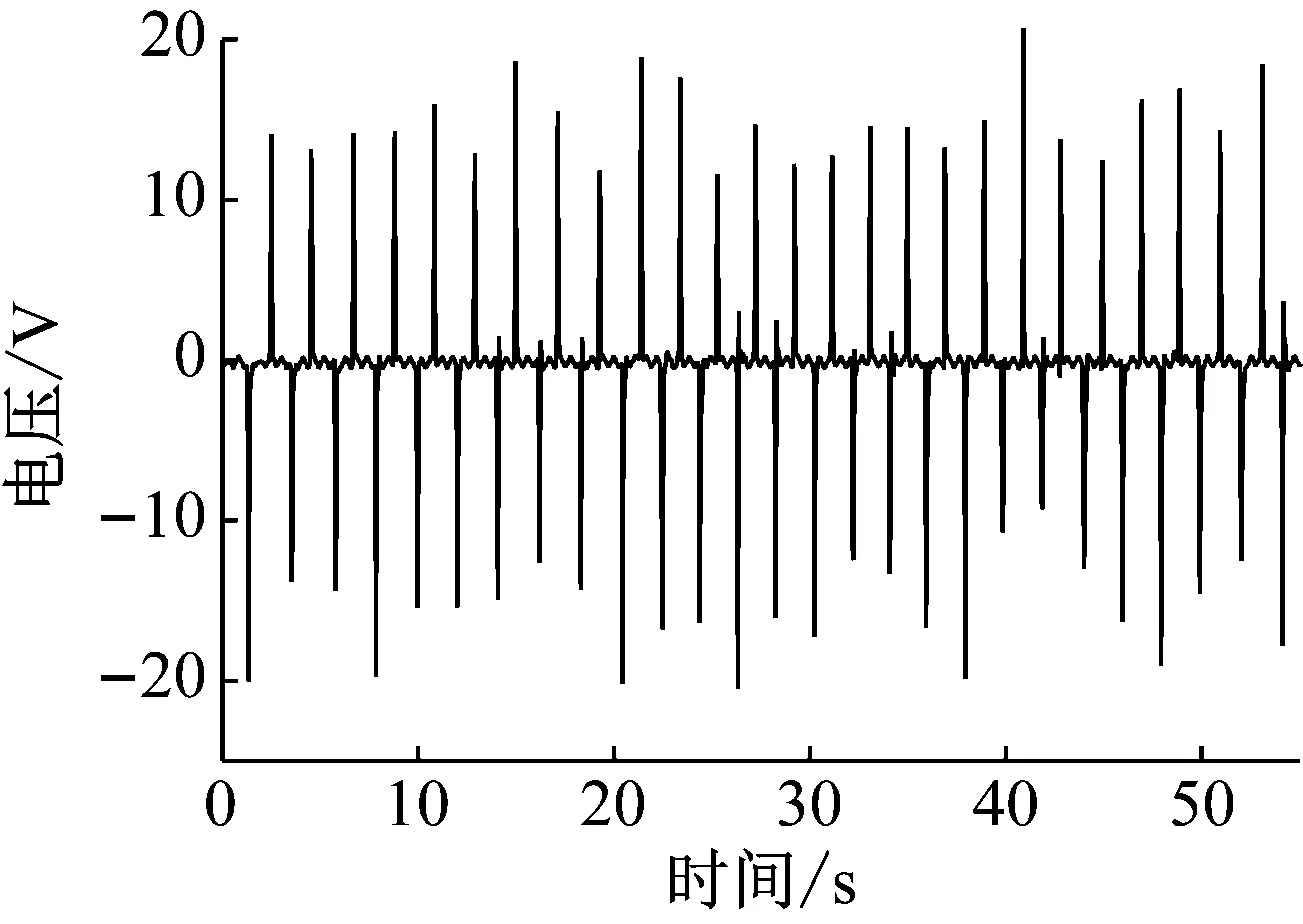
图4 摩擦起电和静电感应产生的触发电压信号
3 实验系统及测量结果
由于工作电路的多样性,该触觉系统的应用也多种多样,在完成设计后,主要将其应用到两个系统中。
(1) 机器人触觉喇叭系统。将工作电路连接至音频播放系统,通过人工操控摩擦片相互接触或接近,在控制电路的自锁触发端处产生一个高电位信号,通过上述原理,喇叭系统被激活,连续播放提前输入的信号;同样地,当摩擦片相互分离或远离时,产生的反向信号(即低点位信号)作用于解锁触发端,使喇叭系统停止播放。通过改变摩擦级的机械结构能够将其工作触发方式由按住、松开触发转换为第1次按动触发,第2次按动停止,能够融入日常生活中大部分喇叭系统(如门铃)之中。
(2) 自动供水系统。将工作电路连接至接通水源电动球阀,按住摩擦级在自锁触发段产生一个高位电信号,通过上述原理使球阀开始工作,将水从水源抽出,实现供水;松开摩擦片,产生的低电位作用于解锁触发端,球阀停止工作,水位自然下落,停止供水。同样地,其触发方式可以改造位按动式,相当于饮水机的一键出水功能。

(a) 开始出水(b) 停止供水
图5 摩擦起电和静电感应控制自动供水系统的照片
实际上,由于触发信号的摩擦极是基于摩擦纳米发电机的发电原理制成的,其触发方式不仅仅依靠于人手的操作,还可以依靠声波、潮汐、风力等多种方式触发,并且能与以其为基础的触觉系统匹配的工作电路种类广泛,所以实际应用空间前景广阔,在娱乐、医疗、制造业等很多方面都有较大应用价值。
4 结 语
本文设计了一种基于微型磨擦纳米发电机原理的机器人触觉系统,相比于传统的机器人触觉系统,它具有结构简单、体积较小等优点。在工作方式上,它只需要微小的机械能供给就能实现自锁运行,不再需要连续激励就能正常工作。这种自驱触觉系统已经成功应用到日常生产中的简易装置,能够实现工作元件依靠接触或接近远离的感应自驱动连续工作,初步体现应用于为门铃,饮水机等方面,相信随着研究的深入应用范围会有很大提升,因此继续研究这种新原理的机器人触觉系统有重要的科学意义和实际应用价值。
