基于PLC自控式清污机改造与实践的思考
2019-03-29黄程
黄 程
(五强溪水电厂,湖南 怀化419636)
清污机在水力发电行业中用于清除进水中沉结于进水口拦污栅上的水渣,以减轻拦污栅压差及进水压力,从而增大机组发电效率。五强溪水电站因进水口拦污栅压差常年维持在14kPa的较高水平,造成发电机组始终无法处于最优发电状态,在耗水相同的情况下,机组负荷较理想负荷减少30MW左右。为此,五强溪电厂进行进水口清污机改造,其核心控制系统选用西门子S7-200系列可编程控制器,辅以接近开关和油压差计装置进行信号采集。清污机安装后,经过近1年的实践证明,PLC控制较为安全可靠,满足了清污机自动化的要求,拦污栅压差降至7kPa左右,机组发电效率大幅提高,累计增发电量超6000万kW·h。
1 设备简介及工艺过程
清污机主要由驱动装置、差动机构、卸渣机构、清污抓斗、导轨、栅体框架、维修平台及电控装置组成。这种机型每台有2根钢丝绳索,缠绕在同一根卷筒上,其中两侧钢丝绳牵引抓斗沿导轨上下滑动,由2台5.5kW升降电机驱动。抓斗的上下限位、钢丝绳松绳和断绳、开闭耙到位均设有成对的接近开关,与PI C控制器一起实现自动除渣的动作,即抓斗下行一开耙一闭耙一上行一卸渣一运行计时一停机计时一下行。
2 清污机的主要技术参数与结构
2.1 主要技术参数(见表1)
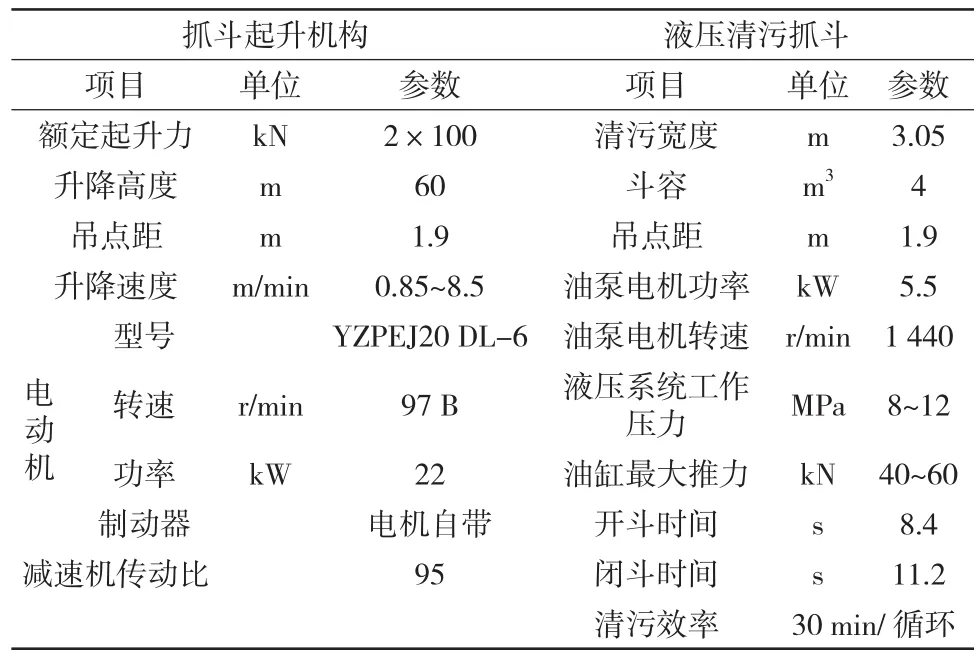
表1 清污机主要技术参数
2.2 主要结构(见图 1)
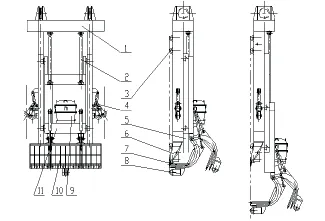
图1 清污机结构
3 清污机的主要工作程序
3.1 清污机工作全过程的工作程序
(1)坝顶门机的大车运行到需要清污的孔口。
(2)在清污工位上进行清污。
(3)运行到新的清污孔口重复上述的动作。
注:以上工作程序的转换由手动操作进行。
3.2 在需要清污的拦污栅上清污的工作程序
在需要清污的孔口上清污的工作程序为:
(1)耙斗(打开状态)下降至需要清污的深度。
(2)转耙向下滑移至极限。
(3)耙斗关闭。
(4)转耙向上滑移至初始状态(耙斗闭合状态)。
(5)耙斗起升至上极限位。
(6)耙斗随小车运行至副小车的下游极限。
(7)耙斗打开卸污。
(8)重复上述动作进行下一个工作循环或移动到下一个需要清污的孔口。
注:上述工作的操作可手动完成也可以半自动完成。
4 PLC控制过程
4.1 电气控制
清污机用交流380V三相四线制电源,从门机供电点用电缆将电能引至控制柜,再经过总交流接触器KM0分配给各机构。总交流接触器KM0可用按钮操作其通断,以投入或切断馈至各机构的电源。交流传动控制系统,起升用2台YZP型变频电动机驱动。
清污机在门机行走梁上设司机室,司机室内设有联动操作台(以下简称联动台),联动台装有门机大车运行、副小车运行、清污机起升、清污开闭斗运行、翻板运行的操作机构,并装有清污机荷载仪、开度仪,用于起升荷载和清污起升行程的监视和控制。
对于清污起升机构,其荷载保护分别设有欠载以及 110%荷载声、光报警并自动停止运行。
4.2 起升控制原理
起升机构采用了目前流行的变频技术,由变频器驱动变频电动机工作,变频器本身就具有欠压、过流、缺相、误操作等各项保护功能,使起重机的故障率大为降低。同时,具有1:10的调速功能。控制回路采用可编程控制器PLC进行控制,并设有过流保护,超载和欠载保护,限位保护和位置控制及联锁保护。载荷和起升高度均在仪表上显示。高度仪接点和载荷控制接点接在PLC控制回路中。变频器的启动、运行信号、故障报警信号均通过其控制端子连接至PLC响应输入输出模块上,由PLC系统接受和控制。起升变频器通过脉冲编码器BM1实现速度闭环以控制电机的转速。脉冲编码器BM1将电机转速转化为两列互差90°的HTL脉冲,送入变频器以完成速度闭环信号反馈,同时2台电机进行主从控制,从而保证电机同步,避免了2台电机变频控制后出现干涉现象的发生。
4.3 开闭斗及滑移机构
清污机设有开闭斗及滑移机构,其操作可通过联动台上的手柄进行。
4.4 翻板机构
清污机设有翻板机构,其操作通过联动台上的旋钮进行。
4.5 门机大车行走机构
门机的大车行走可通过清污机司机室联动台进行操作,同时与门机原联动台进行互锁。
4.6 门机小车行走机构
门机的小车行走可通过清污机司机室联动台进行操作,同时与门机原联动台进行互锁。
5 联锁及保护
5.1 联锁
各机构之间均设有互锁,在同一时刻,二者中只能有一个机构运行。每台电动机的正、反转间设有电气联锁。各机构均有零位连锁,当闭合电源时,各机构的操作手柄应处于零位,控制方能进行。
5.2 保护
清污机按GB3811《起重机设计规范》、SL41《水利水电工程启闭机设计规范》的要求,设有短路保护和过流保护,失压保护和零位保护,限位及行程保护,通道口和机房安全开关,以及能切断总电源的紧急开关等。
6 PLC控制特点与功能
6.1 根据工艺运行条件,实现了一系列准确的清捞动作
由于清污机是间断运行的,因此可通过PLC内部计时器,严格控制清污机的运行时间、停机时间和卸渣时间,所有输出信号均可送至中央控制室实现远程控制,方便值班人员夜间操作。
6.2 松绳保护
在抓斗上行、下行过程中,当遇到障碍物时,出现松绳但耙没下放到位的现象,这是一种非正常状态(耙未到达池底)。为此在清污机PLC内部设置了一计数器CO记下松绳次数,即记录指定时间内出现这种状态的次数,如达到设定值,则常开点CO闭合,M104工作,输出报警信号并控制相应输出继电器,提请操作人员查看现场,采取措施排除障碍物。
6.3 开、闭耙保护
当抓斗开耙、闭耙过程中出现障碍时,开耙、闭耙到位开关不能按时接通,此时PI C设置了T1、T2,限时7s若不能完成开耙、闭耙动作,则输出故障信号,并控制相应继电器输出,保证了清污机的安全运行。
6.4 根据液位差灵活控制运行
当拦截残渣数量较多时,清污机前、后液位出现较大的高度差,此时即使在停机状态也必须开机,因此在自动工作状态,清污机运行还受液位差控制器及定时时间的控制。
7 电气控制元器件
按设计要求,电气控制元器件选用国际著名公司生产的产品,和国家定点厂商的可靠产品。主要电气件选用施耐德公司产品,变频器采用日本安川G7系列,PLC采用西门子S7-200系列,一般电气辅助元件选用我国起重行业的定点厂可靠产品。
8 问题及难点
8.1 拦污栅及其孔口和清污机的配合问题
由于五强溪水电站共计有40孔拦污栅,并且拦污栅原来没有考虑用抓斗清污的问题,所以对拦污栅的实际现状应当摸清,建议清污抓斗使用前派潜水员对拦污栅进行全面的排查,对可能存在问题的拦污栅进行检测,对影响清污抓斗运行的地方应进行处理后再进行清污的工作。
同时,对电站拦污栅进水口的现状,也需要事先进行检查和测量,例如,拦污栅孔口的实际宽度,孔口表面的平整状况,有无伸出的钢筋头等,否则可能会影响清污抓斗的正常运行,甚至会造成事故的发生。
8.2 清污机适用的范围和其清污的能力是有限的
受条件所限,清污机对有些工况可能清污效果并不理想。例如,拦污栅孔口处的横向流速较大时,由于清污抓斗定位的方式不像带清污抓斗导槽的清污抓斗,将清污抓斗牢牢的限制在清污抓斗的导槽中,所以如有较大的横向流速,会引起清污抓斗的转动,降低其清污效果,甚至无法清污,此时应减小发电机组的开度,限制拦污栅的过栅流速,才可以进行清污的工作。
8.3 特殊的污物还需要特殊的处理
清污机可较好的解决电站的清污问题,但该清污机对一些特殊的污物和特殊的工况依然可能无法处理,例如对插入拦污栅中的树干,这种清污机就无法清除,还需要采取其他的清污措施。
9 解决方法
(1)五强溪电站电控中心位于门机顶部,夏季温度较高,而PLC要求环境温度在0~55℃,安装时不能将其放在发热量大的元器件下面, 四周通风散热的空间应足够大。如果周围环境超过55℃,则应安装电风扇强迫通风。
(2)为了抑制加在电源及输入端、输出端的干扰,应给PLC接上专用地线,接地点应与动力设备(如电机)的接地点分开,若达不到这种要求,则必须做到与其他设备公共接地,禁止与其他设备串联接地。
(3)对电源的要求。PLC供电电源为50Hz、220(1±10%)V交流电。对于电源线来的干扰,应安装1台带屏蔽层的变比为1:1的隔离变压器,然后再接入PLC。若现场电源质量满足不了上述要求,则需设置一个精度较高的稳压电源。
4PLC在使用中会因外界干扰、后备电池电量耗尽和硬件等因素丢失其内部程序。一旦发生此类情况,若不能及时将原程序重新装入,则将造成设备的全面瘫痪,这就需要做好程序的备份。
10 结束语
PLC应用于水电站清污机的自动控制,实现了清污抓斗下行、开耙、闭耙、提升、卸渣5个机械动作,按照预先设定的时间运行,直至限制各个动作的接近开关接到信号为止。运行实践证明,与传统继电器控制相比,PLC控制节省了大量时间继电器、计数器、步进控制开关等设备,提高了自动控制的准确性和可靠性,同时保障了被控设备的运行安全,具有良好的经济效益和社会效益。