典型金属蒙皮结构空气舵力热联合试验技术研究
2019-03-27李永瑞丛琳华刘宁夫
李永瑞,丛琳华,刘宁夫
(中国飞机强度研究所,陕西 西安 710065)
空气舵是控制导弹飞行姿态的重要执行机构之一,同时也是导弹结构设计的关键部件之一,与导弹总体气动设计直接相关。通过操纵空气舵转动产生相应的气动力,以控制导弹的飞行姿态,保证符合靶点弹道设计[1]。
高速穿越地球大气层或在大气层中巡航飞行时,空气舵不仅受气动力、惯性力等多种机械载荷的作用,还要经受非常严酷的气动加热作用。为保证导弹的安全性和可靠性,必须对空气舵结构进行地面模拟试验,模拟高速飞行时的受热及承载状况,在热环境和力学环境耦合作用下分析热应力、热变形、结构膨胀量等高温力学性能参数的变化对结构强度的影响,观察结构的受力状况,进一步评价其在高温下的承载能力、使用寿命以及安全可靠性。
1 研究对象
研究对象为典型金属蒙皮骨架结构的导弹空气舵(采用舵机舱舱体作为试验件支持段),如图1所示。在高速飞行过程中,空气舵承受气动载荷和气动加热的作用。气动模拟时,空气舵安装于舵机舱舱体左侧,舵机舱处于水平状态,空气舵平行于水平面,将空气舵可折叠一侧朝下,通过模拟作动器将空气舵锁定在零位状态。舵机舱前端框通过螺栓与支持平台连接。
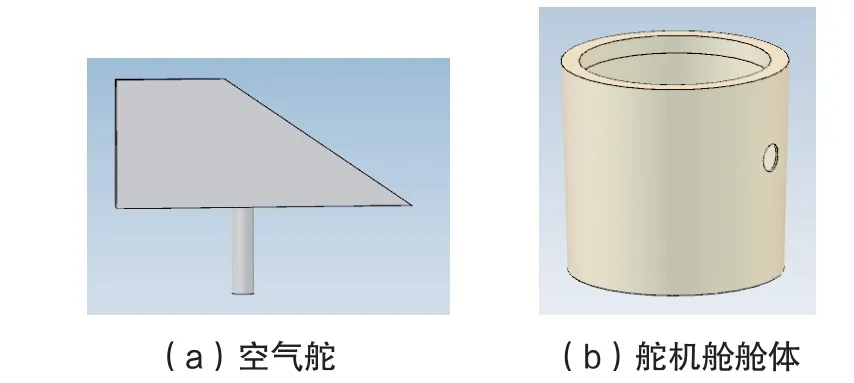
图1 研究对象外形
2 载荷模拟
2.1 气动热载荷模拟
目前,气动热载荷模拟所使用的热源手段主要有石英灯、硅碳加热器、硅钼加热器以及石墨加热器等。硅碳、硅钼以及石墨等加热器可以生成温度更高的热试验环境,但是其加热装置的升温速度比较慢且热惯性大,不适合用于复杂机动飞行条件下的快速非线性高温热环境的动态模拟[2]。而石英灯因具有良好的热性能,具有可控性好、温度范围宽、适用范围广等优点,因此通常采用石英灯加热的方式来满足高超声速飞行器气动热载荷模拟的要求。
在空气舵上下蒙皮两侧布置石英灯红外辐射加热系统,采用石英灯红外辐射加热方式模拟实际飞行过程中舵面的气动热环境。石英灯红外辐射加热系统见图2。选取舵面蒙皮上靠近前缘位置的特征点作为温度控制点,实现对温度载荷的闭环控制。
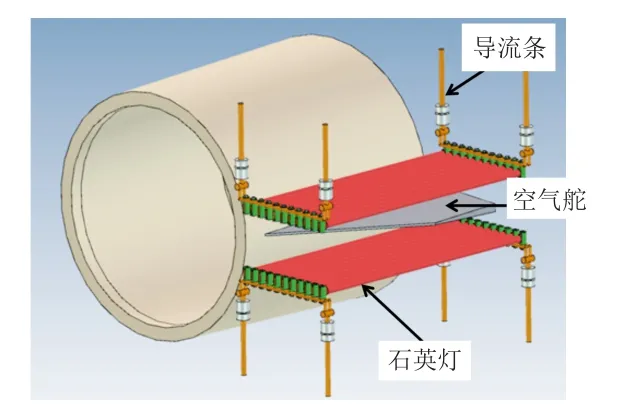
图2 石英灯红外辐射加热系统
2.2 高温环境下力载荷的施加方式
结构热强度试验中的力载荷施加较为困难,一方面力载荷施加装置与试验件的连接部分在热环境中,受热情况有时甚至比试验件更严酷,必须按照受热结构进行优化设计,以保证加载装置的使用功能;另一方面力载荷施加装置应尽量减少对温度场的影响,以保证试验模拟的效果[3]。就翼面类结构试验件而言,高温环境下力载荷施加方式主要有托板拉杆、焊接头、单面推杆以及夹板等4种方式。
针对金属蒙皮骨架结构空气舵的特点和要求,通常选用托板、拉杆方式进行力载荷的施加,这种方式加载点位置准确,载荷模拟准确度好,加载装置结构简单、安装方便,且可靠性高,试验过程中不影响试验件变形,适用于各种外形尺寸的试验件。
托板、拉杆加载方式如图3所示,根据试验加载点附近区域结构特点,在避免破坏试验件承载结构的情况下,选择每个加载点附近非关键结构区域开孔,通过螺栓将托板固定在试验件表面,托板安装形式如图4所示,最后通过拉杆将力传递至托板,再由托板传递至试验件。各加载点载荷通过比例杠杆合成或单独加载,以满足载荷的分布要求[4]。
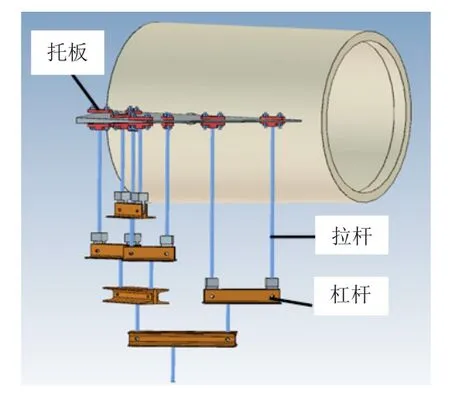
图3 托板、拉杆加载形式
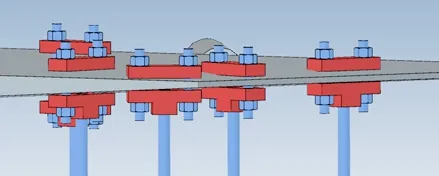
图4 托板安装形式
拉杆加载时需要穿过试验件和加热器,试验件及加热器的设计需要充分考虑试验件变形、热膨胀等因素的影响,避免加载过程中由于试验件变形或者破坏使得拉杆破坏加热器或者拉杆与加热器连接形成短路。
由于托板直接贴合在空气舵表面,因接触传热将导致试验件局部温度降低,因此对于托板与试验件贴合面布置隔热棉毡进行隔热处理,同时增加贴合性,避免因集中力损伤试验件。
3 测量方式
3.1 温度测量
在空气舵舵芯、舵机舱舱体及舵轴孔附近等典型位置,布置温度传感器,记录试验过程中的温度变化。瞬态辐射加热条件下,通常用于测量结构表面温度的温度传感器有K型(镍铬-镍硅)、T型(铜-康铜)及B型(铂铑30-铂铑6)三种类型热电偶,其中K型热电偶具有测温范围宽、灵敏度高、寿命长、性价比高等优点,是结构热试验中应用最广的一种热电偶。一般金属蒙皮结构的空气舵多选用K型热电偶,采用储能焊的方法将K型热电偶焊接于空气舵表面,如图5所示。
3.2 位移测量
测量结构在外载荷作用下的变形,是验证结构强度和刚度、检验结构的承载能力、评价结构设计的重要依据。通常在空气舵上选取特征部位,布置位移传感器记录加载过程中的位移数据。

图5 K型热电偶固定方式
位移测量方式有接触式和非接触式两种。接触式位移测量是采用接触探头直接接触被测结构,得到结构位移的方法,常用的接触式位移传感器有千分表、拉线式位移计、线性差动变压式位移传感器等;非接触位移测量是以光电、电磁、超声波等技术为基础,在仪器的感受元件不与被测物体表面接触的情况下,即可获取被测物体的各种外表或内在的数据特征,常用的非接触式位移传感器有激光位移传感器、数字图像相关法测量系统等。
接触式测量方法具有较高的分辨率和可信度,且技术发展得相当完善。非接触式测量精度大多数低于接触式测量,且价格较高,在高温试验中,石英灯加热产生的红外光、试验件加热后冒出的浓烟、试验现场的高温等会对测试系统产生干扰,影响测量数据的可靠性。
综合考虑测量精度要求、试验成本以及试验件所处的热环境等因素,选用拉线式位移传感器进行位移测量,如图6所示。拉线式位移传感器是把机械运动转换成可以计量、记录或传送的电信号。运动发生时,被测物体产生位移,拉动与其相连接的拉线,拉线带动传感器传动机构与传感元件同步转动,从而输出与被测物体移动量成正比的电信号,测量输出信号得出物体的位移。拉线式位移传感器具备安装方便、测量精度高、抗振动和抗冲击性能好等优势。
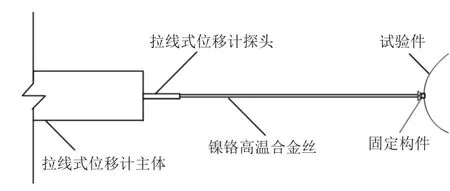
图6 拉线式传感器连接镍铬丝测量方法
4 试验验证
试验验证时,为了消除单侧加载对舱体产生的扭转效应,在舵机舱右侧的舵轴孔处安装空气舵模拟件,并在模拟件上同步施加与左侧空气舵相同的载荷。杠杆加载系统、石英灯红外辐射加热系统布置见图7。
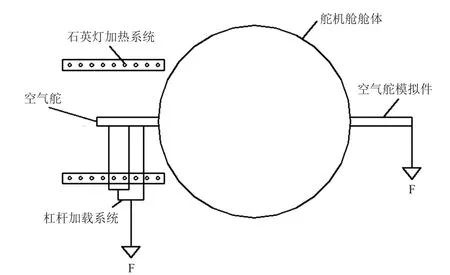
图7 杠杆加载系统、石英灯红外辐射加热系统
采用上述空气舵力热联合试验的相关技术,通过石英灯管辐射加热的方式模拟实际飞行过程中舵面的气动热环境,拉板-杠杆的加载方式模拟舵面法向气动载荷,顺利完成了超音速巡航导弹可折叠空气舵在不同飞行状态下的力热联合试验。试验过程通过测力、温度传感器采用闭环控制,实现对气动载荷及温度载荷的高精度控制。试验气动载荷精度情况见表1,可以看出,载荷控制误差满足控制精度要求;试验的温度控制曲线见图8,可以看出,温度的输入值与输出值基本吻合,完全满足试验要求。

表1 试验气动载荷控制精度情况

图8 温度控制点基准及反馈对比曲线
5 结论
通过本试验技术的研究,形成了一套适合典型金属蒙皮结构空气舵地面力热联合试验的技术和方法:采用石英灯辐射加热方式模拟空气舵气动加热效应产生的温度载荷,采用拉板-杠杆的加载方式模拟空气舵法向气动载荷。应用这套技术成功进行了空气舵地面模拟试验,全面考核了空气舵结构在施加温度场和气动载荷后的综合响应特性,获得了温度、位移等有效数据,为后续进行类似结构件的地面摸底试验提供了技术参考。
