一种侧视地图建筑物轮廓线自动提取方法
2019-03-25彭明军邵世维
刘 辉,彭明军,邵世维,陈 伟
(1. 武汉市国土资源和规划信息中心,湖北 武汉 430014; 2. 武汉市国土资源和规划局,湖北 武汉 430014)
目前,以E都市和都市圈为代表的侧视地图中,大都采用人工方式提取建筑模型轮廓线,不仅造成人力资源的浪费,轮廓线粗糙,精度低,而且提取效率低下,难以满足海量三维模型快速更新的要求[4]。在遥感图像处理领域,对轮廓线提取做了大量的研究。文献[5-6]基于高分辨影像自动提取建筑物轮廓,并能较好获取建筑物的轮廓。文献[7]利用直线性质提出直线提取和合并的算法,有效提取卫星图片上的建筑轮廓。文献[2]利用深度缓冲区提取建筑模型,采用二值化方法提取建筑轮廓线;文献[8]通过假设屋顶灰度均已知,经验选定阈值,利用点生长算法提取建筑物边界;文献[9]通过组合多种方法提取影像溢油信息,再结合已有分割标准,提出基于图像溢油信息评价指数的分割方法;文献[10]通过简化尺度空间检测影像角点,实现对关键点特征的定位,实现影像的多级匹配;文献[10-11]结合NDVI指数,对影像监督分类,实现从影像上提取绿地信息。总之,基于高分辨率遥感影像的信息提取方法,不论是影像特征提取地物特征,还是通过二值化轮廓提取,对三维建筑物特征提取存在边缘破碎,遮挡情况处理不准确等问题,难以自动精确提取建筑轮廓。因此,在充分利用三维模型数据信息的基础上,提出一种从侧视地图上自动提取建筑轮廓的方法。该方法通过采用两次渲染法得到遮挡建筑轮廓模型,再利用形态学算子对轮廓模型进行处理图像,确定建筑轮廓初始形状,最后再采用改进GAC模型精确分割图像,获取建筑物的轮廓线。
1 轮廓线提取原理与方法
1.1 测地线活动轮廓模型
图像分割是常用的图像处理方法,将图像简化为具有类似属性的和空间相关的区域,活动轮廓模型是常用的图像分割方法之一[13]。该模型将图像分割问题归结为极小化一个封闭曲线的能量泛函,并利用变分法将极小化能量泛函转换为关于封闭曲线的梯度下降流,进而演化曲线轮廓[13-14]。测地线活动轮廓模型(Geodesy Activate Contour,GAC)是目前基于边缘和偏微分方程方法的活动轮廓模型[9],是由Caselles和Morel将曲线演化和水平集方法结合起来的,该模型的能量函数表达成
(1)
式中:L为闭合曲线C(p)的弧长;s为Euclidean弧长;▽为梯度算子。
梯度下降流为:

(2)
式中:k为曲线的曲率;N为曲线上点的单位法向量;g(.)为边缘停止函数定义为:
(3)
式中:Gσ为方差为σ高斯核;|▽(Gσ)*I|为平滑后的梯度模值;*为卷积。
由于GAC模型分割图像的效果,受初始曲线位置的影响。当图像存在噪声或有弱边缘时,轮廓线曲线的梯度函数发生变化,容易产生误分割。因此,噪声、弱边界和初始轮廓线位置严重限制了GAC模型的发展和应用。
1.2 改进的GAC模型
根据文献[13-15]可知,GAC模型可分割图像的任意目标,但它易受曲线的初始位置和弱边界的影响,产生欠分割。对于比较复杂的图像,图像分割的结果体现为局部最优[15]。因此,该模型在描述复杂图像时,容易造成误分割。
考虑加入全局信息和局部信息,优化模型对图像的分割效果,因此,提出一种改进后GAC模型。通过将5像素×5像素大小的窗口作为高斯滤波矩阵,获取该窗口局部方差,并将其与全局方差一同引入到能量函数,并通过对其归一化替代边缘停止函数,驱动轮廓曲线进行移动,实现对图像的分割。
引入的图像局部方差信息和全局方差信息后的能量函数表达式为:
(4)

(5)
σ(x)为局部方差,以当前像元x为中心,表达式为:
(6)

因此,结合GAC模型的局部特点,将图像的全局方差和局部方差引入到GAC模型的能量函数,提高模型对图像复杂的处理能力,实现对图像分割。通过引入λ3和λ4,避免陷入局部过拟合的情况,从区局引导加快轮廓线的拟合演化。
1.3 基于改进GAC的轮廓线提取流程
本文提出的侧视地图建筑物轮廓线提取方法流程包括3个部分:①基于空间分块的三维模型加载,包括分块加载三维城市模型和将模型投影至屏幕空间;②顾及遮挡的建筑物分割方法,采用二次渲染方式分离提取单一建筑物模型及被遮挡的建筑物模型;③建筑物轮廓线提取,包括利用Canny算子检测建筑轮廓边缘、利用形态学算子处理轮廓边缘,最后基于GAC模型精确提取建筑轮廓线。
1)首先利用文献[2]方法对三维模型进行投影处理,基于分块构建R树索引;同时筛选出分块区域内可完整显示和非完整显示的三维模型,并将非完整模型索引号进行存储;
2)遍历当前分块区域中完整显示的三维模型,分别基于深度缓冲区处理建筑物之间的遮挡,通过建筑模型之间不同深度值,判别建筑模型之间遮挡关系;再利用颜色缓冲区的颜色值区分目标对象与背景,同时绘制目标投影轮廓C0,实现遮挡情况下建筑物群的分割,单一建筑模型的提取,并转化为二值化图像;
3)根据二值化图像,确定初始可能的目标对象和背景区域。采用形态学算子对投影轮廓进行膨胀处理,将细微和破碎的不闭合的部分进行闭合,得到处理后轮廓C1;
4)根据轮廓C1确定GAC模型可能的初始目标对象和背景区域,并将C1设定为活动轮廓线的初始轮廓;将轮廓内设定为目标对应,并标记为1,其他区域设定为背景对象,标记为0;
5)演化水平集方程。对二值化图像进行灰度处理,计算图像灰度信息,在前一次迭代的基础上,利用变分法重新计算新的梯度和散度,使能量函数在全局范围内最小,计算当前点的梯度,得到新的轮廓曲线;
6)在给定阈值范围,当能量函数不在发生变化时停止演变,否则重新返回步骤5)继续迭代,进行演化;
7)依次遍历当前分块内完整显示的模型,重复2)~6)步骤,直到处理全部完整显示模型;
8)针对不完整显示的模型,按照其最小外接包围盒,移动至屏幕中心,重复2)~6)步骤,得到不完整显示模型的轮廓曲线;并依次遍历当前分块内不完整显示的模型,重复2)~6)步骤,直到处理完全部完整显示模型;
9)按照步骤1)~8),处理分块,直至处理完所有模型。
2 实验与分析
本文利用武汉市三维城市模型数据验证方法的可行性和有效性,并将提取的轮廓线与”E都市”上提取的轮廓线进行对比,验证在建筑物存在遮挡情况下,本文方法能有效分割不均匀的图像,并具有较好地抗噪性,在一定程度上克服GAC模型对轮廓大小和位置敏感等问题,相比于已有的人工提取方法,本文方法效率和提取的轮廓线精度都有提高。
根据经验,将新模型中的高斯模型参数分别设σ=2,λ1=λ2=0.35,λ3=λ4=0.15。由于模型参数λ1,λ2,λ3和λ4是用来控制局部和全局信息拟合,对于灰度严重不均匀的图像,分割的准确性依赖于局部信息的能量拟合;对于灰度一般不均衡的图像,全局信息凸显更加重要,需要更多全局信息保证轮廓线在目标对象边缘处快速收缩。由于采用二次渲染之后,形态学算子对图像处理后,边界和背景灰度对比明显,因此,选取稍微较大的控制局部信息,选取λ1=λ2=0.35,λ3=λ4=0.15。
在设定好模型参数后,针对武汉市三维城市模型和E都市三维城市模型存在生产时间、投影等差异,以建筑轮廓线复杂,建筑群和建筑遮挡三个特征,对提取的轮廓线进行比较,忽略因投影参数和视角不一致提取轮廓不同的问题,保证建筑轮廓贴合度、准确性方面的提取结果。而且,本文的建筑物轮廓线提取方法不受三维模型参数和投影参数的限制。
图1为沿江大道明珠豪生大酒店建筑模型,并且建筑模型轮廓线复杂,其中图1(a)是本文提取的单体建筑轮廓线,图1(b)是E都市地图上人工交互提取的轮廓线。由于投影角度和参数不同,建筑模型在空间呈现出不同形状;图1(b)中球体发生明显形变,球体和建筑模型衔接处,当顾及了球体曲线轮廓后,无法保证建筑棱角的贴合,导致轮廓线粗糙;同时对于棱角过多处,采用手工提取,没有很好贴合于建筑轮廓界面。相比而言,本文方法能更好贴合建筑模型。

图1 沿江达到明珠豪生大酒店

图2 解放大道新世界中心
图2是解放达到新世界中心建筑模型轮廓线提取结果,存在建筑群等情况,其中图2(a)是本文提取的单体建筑轮廓线,图2(b)是E都市地图上人工交互提取的轮廓线。经过对比可知,由于投影角度和参数不同,建筑模型在空间呈现出不同形状;图2(b)中由于存在大范围曲线等弧状轮廓,采用人工提取时,无法准确贴合曲线轮廓,导致弧面贴合度较差。相比而言,本文方法提取的轮廓线更贴合于实际建筑模型。
图3是新华路良友大厦,由图3可知,存在建筑遮挡的情况,图3(a)是本文提取的单体建筑轮廓线,图3(b)E都市地图上人工交互提取的轮廓线。经过对比,由于投影角度和参数不同,建筑模型在空间呈现出不同形状;图3(b)中,由于存在建筑遮挡和阴影等特征严重干扰到人工提取,因此,导致人工提取的范围过小,轮廓线粗糙和局部失真等问题;由图3(a)可知,被遮挡建筑物和遮挡建筑物之间边界准确程度很高。由于本文方法从三维模型出发,通过两次渲染方法解决三维模型之间的遮挡问题,进而提取三维建筑模型,并将提取的模型作为新模型的初始位置和大小,极大提高模型收敛速度和迭代次数。
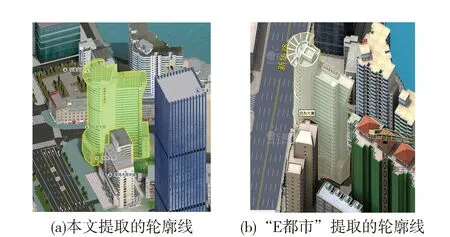
图3 新华路良友大厦
3 结 论
本文通过构建改进的测地活动轮廓线模型,提出从三维模型到侧视地图的建筑轮廓线自动提取方法。该方法很大程度上改善了目前人工交互提取成本高,效率低下的问题,同时也改善了侧视地图建筑轮廓线提取方法的弊端,通过测地活动轮廓线从全局和局部角度,充分考虑图像灰度图像的均衡性,避免了图像噪声和灰度不均引起的图像分割不精确,形状变形等问题。对于存在三维模型城市,采用本文方法可以在地图制作过程中提取较清晰的建筑轮廓线。实验结果表明,该方法具有自动化程度高,不需要人机交互选择、通过加入高斯模型构建的新能量泛函,很好解决建筑群和建筑遮挡等问题。
