陀螺寻北仪现场校准方法研究
2019-03-25付永杰
付永杰
(92493 部队,辽宁葫芦岛125000)
1 引 言
陀螺寻北仪由高精度双轴动力调谐陀螺测量地球自转角速度,自主确定所附载体的真北方向值[1]。 按照陀螺仪原理,它能根据地球自转角速度的北向分量自动寻找并跟踪地理北向,并能够精确测定地面点的方位角。 与传统北向仪器陀螺罗经和磁罗盘相比,其具有全天候,机动性强、自主定向精度高、定向速度快、使用简单方便,便于携带的优势[2]。 陀螺寻北仪主要应用于雷达、天线、军用车辆初始对准和方向控制。 由于陀螺寻北仪是用于定向的仪器,其寻北精度是陀螺寻北仪最主要的技术指标。 目前,关于陀螺寻北仪的现场校准还没有统一的规范。 各研制单位和生产厂家均是采用自行编制的单项专用或野外方法进行测试评估[3]。目前,国内外有一些陀螺寻北仪校准实验室建立北向方位角基准。 其主要方法是在地面建立两个大地测量点,按照大地测量的方法埋设地标,形成一条方位基准边或通过平行光管或平面镜将标准引出[4]。 国外如:英国诺丁汉大学,在实验室建立了长为43.136m 的基线,两端埋设了十分坚固的基石,将室外已知天文方位角传递到这条基线上,为陀螺仪检测和仪器常数的标定提供了一个理想的条件。 德国GYROMAT2000 陀螺寻北仪也建有相应定向精度校准装置。 在国内,西安测绘研究所也建有陀螺寻北仪校准装置[5]。 北京长城计量测试技术研究所也有陀螺经纬校准装置,它是用一个平行光管作为北向方位角。 北京航天计量测试技术研究所建立的北向基准,采用平面镜与平行光管集成到一个墩上的方案,来实现陀螺寻北仪的寻北精度校准。 在实验室建设基岩墩,在基岩墩上安放平行光管或者平面镜,再对其进行引北赋值的方法,精度高,系统稳定,但是无法在现场进行测试。 现在使用中的大部分陀螺寻北仪安装在车辆上,不能卸载下来。
本文提出了一种陀螺寻北仪现场校准方法,解决陀螺寻北仪的现场校准问题。
2 陀螺寻北仪校准原理
2.1 基本术语
天文方位角:过某点的重力线在大地水准面上的交点的天文子午面到过该交点的重力切线和过另一点的重力线的大地水准面上的交点所组成的平面的夹角[6]。
仪器常数:陀螺经纬仪陀螺轴稳定位置的子午面与地面的交线与真子午线的夹角[6]。
寻北时间:从启动陀螺电机到显控装置显示出真北方向的时间[7]。
寻北重复性是以陀螺经纬仪一测回定向标准偏差σ 来评定的。 寻北精度由寻北重复性定义[8]。
2.2 使用的测量标准及设备
陀螺寻北仪校准的标准设备主要是方位角标准和计时器。 方位角标准一般用已经进行引北赋值的平行光管或平面镜组成,方位角测量标准偏差应不大于仪器标称值的1/4。 计时器一般用秒表,秒表分辨率≤1s。
2.3 校准项目
陀螺寻北仪的校准项目主要包括仪器常数、寻北重复性(即寻北仪精度)和寻北时间。
2.4 工作原理
陀螺寻北仪的实验室校准采用直接测量法进行[6]。
1)仪器常数
陀螺经纬仪的仪器常数在方位角标准上进行校准。 将仪器安装在工作台上,精确整平,使陀螺经纬仪望远镜视准轴与方位目标精确瞄准或准直,进行寻北观测,获得方位角测量值A1,此为一次测量,按照上述操作至少进行6 次独立测量,分别得方位角测量值Ai。 按式(1)计算仪器常数为
式中:Δ——仪器常数,(o′″);Ai——第i 次方位角测量值,(°′″);A0——方位角标准值,(°′″);n——测量次数(i =1,2,…,n)。
2)寻北重复性
在仪器常数校准结束后,按式(2)计算寻北重复性

式中:s——寻北重复性,(″);Ai——第i 次方位角测量值,(″);——n 次方位角测量值的平均值,(″)。
计算得的寻北重复性即是设备的寻北精度。
3)寻北时间
在仪器常数校准时,用计时器记录寻北开始到显示真北方向的时间,取多次测量时间的最大值作为寻北时间T。
3 陀螺寻北仪现场校准方法
陀螺寻北仪的现场校准采用传递比较法进行校准。 使用的标准设备主要有高精度陀螺经纬仪、平行光管、北向基准引出块和秒表组成。 其中高精度陀螺经纬仪用于产生北向基准。 平行光管经高精度陀螺经纬仪赋值后,可以作为带瞄准镜的陀螺寻北仪方位角标准,同时也作为北向传递途径。 北向基准引出块由测量基准面和基准引出平面镜构成,作为无瞄准镜的陀螺寻北仪方位角标准。 秒表用来测量寻北时间。
首先,用实验室陀螺寻北仪校准装置,对高精度陀螺经纬仪进行校准,然后,利用校准后的高精度陀螺经纬仪作为传递标准,对平行光管进行引北赋值,利用平行光管为北向传递途径,采用与北向光管平行的基准面将北向基准引入到基准面上实现与被测陀螺寻北仪的基准对齐,平行光管和基准面作为现场校准时的方位角标准,用于现场校准陀螺寻北仪。 陀螺寻北仪现场校准装置中的方位角标准进行引北赋值,再用赋值后的方位角标准作为北向基准,校准车载陀螺寻北仪。
现有陀螺寻北仪主要有两类,一类是带瞄准镜的陀螺寻北仪,另一类是不带瞄准镜的陀螺寻北仪[9]。
1)带瞄准镜的陀螺寻北仪现场校准方法
用高精度陀螺经纬仪瞄准平行光管,对平行光管进行引北赋值,使平行光管为北向方位角基准。 高精度陀螺经纬仪测量方位角值α,把高精度陀螺经纬仪从基座上取下来,把被测的陀螺寻北仪放在基座上,用被测陀螺寻北仪测量方位角值α1,由式(2)计算寻北精度。 测量原理图如图1所示。

图1 带瞄准镜的陀螺寻北仪现场校准原理图Fig.1 Field calibration principle diagram of the gyro north finder with sight
2)不带瞄准镜的陀螺寻北仪现场校准方法
用高精度陀螺经纬仪瞄准平行光管,对平行光管进行引北赋值,使平行光管为北向方位角基准,通过北向基准引出块引出平面将平行光管的北向光轴引出变成被测陀螺寻北仪的可测基准,当带有侧面基准的被测陀螺寻北仪靠紧北向基准引出块引出平面后即可确定被测陀螺寻北仪的北向方位角值α1,由式(2)计算寻北精度。 测量原理如图2所示。
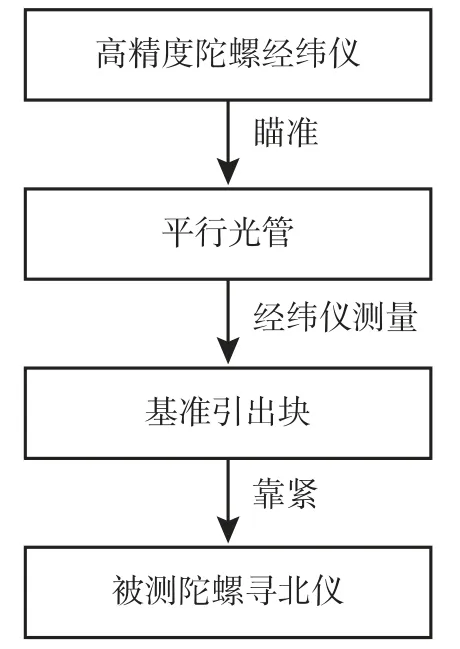
图2 不带瞄准镜的陀螺寻北仪现场校准原理图Fig.2 Field calibration principle diagram of the gyro north finder without sight
4 陀螺寻北仪现场校准方法测量结果不确定度分析
采用本文提出的陀螺寻北仪现场校准方法,由高精度陀螺寻北仪、平行光管、北向基准引出块组成的现场校准装置,根据其测量原理,测量不确定度来源如下。
1)选用北京博飞GTS-1 高精度陀螺经纬仪作为北向传递标准,经实验室校准后,该设备北向定向的误差引起的不确定度为u1=10.0″;
2)选用平面度为0.2μm 平面镜作为基准引出平面镜,由基准引出平面镜平面度及平行度引起的不确定度为u2=5.0″;
3)选用焦距为550mm 的平行光管作为方位角标准,由平行光管瞄准误差引起的不确定度为u3=1.0″;
4)由平行光管与基准平面镜测量及调整不平行的误差引入的不确定度u4=6.0″;
5)除上述这些影响测量精度的主要因素外,还有由于放置方式等因素引起的测量不确定度,该项不确定度为u5=2″。
扩展不确定度为U =2uC=12.8″×2 =26″(k =2)。
经测量不确定度分析与评定,用提出的现场校准方法和校准装置,可校准寻北精度在1′(σ =1)以下的陀螺寻北仪。 在实际应用中,通过提高传递用高精度陀螺经纬仪的技术指标,可以提高该方法的测量精度。
5 结束语
本文提出的陀螺寻北仪现场校准方法,采用比较测量方法,用高精度陀螺寻北仪作为传递标准,在现场对方位角基准平行光管和平面镜进行引北赋值,可实现带瞄准镜和不带瞄准镜的寻北精度在1′(σ =1)以下的陀螺寻北仪现场校准,解决了车载陀螺寻北仪无法现场校准的问题。 实践证明,该方法在陀螺寻北仪寻北仪精度的现场校准有较好的应用前景。
