欧洲列控系统中GNSS应用研究与发展综述
2019-03-24帅玮祎董绪荣丛蕾张碧秀王韦舒范祥祥
帅玮祎,董绪荣,丛蕾,张碧秀,王韦舒,范祥祥
欧洲列控系统中GNSS应用研究与发展综述
帅玮祎1,董绪荣1,丛蕾2,张碧秀3,王韦舒4,范祥祥1
(1. 航天工程大学,北京 101416;2. 63629部队,北京 100162;3. 93897部队,陕西 西安 710003;4. 北京交通大学 电子信息工程学院,北京 100044)
针对GNSS在列控系统中的应用优势,介绍GNSS的列车定位原理;基于GNSS在欧洲列控系统中的应用情况,对其应用研究现状、定位性能分析方法和需求指标、现有定位方法以及性能评估进行综述分析,并对其应用研究前景与挑战进行展望。
GNSS;列控系统;定位;需求;性能评估

位置信息是铁路智能系统中的关键信息之一,及时准确的列车位置的获取,有助于保证列车安全有效的运行[1]。列车位置信息可以用于车队调度、人员位置确定及危险货物跟踪等不同的应用中,进而实现列车控制与调度的全面智能化,不同的应用服务需要不同性能级别的位置信息,其中一个主要应用就是列车控制系统。欧洲铁路中,早期采用的是基于轨道电路的列车控制系统(Track circuit Based Train Control, TBTC),列车位置主要通过轨旁设备(轨道电路、计轴、信标等)辅助确定,存在传输环境恶劣、传输速率低、信息量小和成本过高等缺点,已经不能满足现代列车运行的需要。当前各国都在逐步发展基于无线通信的列控系统(Communication Based Train Control, CBTC),其利用无线信道进行车—地双向数据传输,实现对列车连续的跟踪、监控以及闭环控制,具有安全性好、运输效率高等优点。欧洲铁路控制系统(European Train Control System, ETCS),是欧洲各信号厂商在欧盟支持下,为解决欧洲铁路网中不同线路上不同系统的兼容互操作问题开发的。ETCS包含5个应用等级(ETCS- 0,ETCS-1,ETCS-2,ETCS-3和ETCS-NTC),用以满足不同铁路线路上的运输需求,保证列车安全[2]。传统的ETCS采用的是轨道应答器检测列车存在,并结合里程计进行列车定位的技术,但这种定位方法需要大量地面设备,成本过高。因此,基于全球导航卫星系统(Global Navigation Satellite System, GNSS)的列车定位方法被逐步引入列控系统中,不仅可以克服系统对地面设备的依赖性,降低了运营成本,同时可以提供全天候的高精度服务,并更加容易实现不同列控系统之间的互操作[3]。本文首先对基于GNSS的列车定位原理进行概述;然后通过介绍欧洲列控系统中GNSS的应用研究现状,对列控系统中引入GNSS需要解决的3个问题:定位性能分析与需求指标的确立、定位方案的选取以及定位性能的评估方法进行综述;最后结合应用现状,归纳总结GNSS在列控系统中未来应用研究前景与挑战。
1 基于GNSS的列车定位原理
图1为典型的基于GNSS的列控系统定位原理示意图。该系统采用了GNSS/INS多传感器组合导航方式,卫星接收机接收卫星定位数据信息,惯性导航系统中陀螺仪提供列车姿态变化信息,加速度计提供列车速度变化信息,而车轮传感器提供列车前向速度信息,这些信息经过多源融合处理,推算得到列车的估计位置。
该系统以GNSS定位单元为主,同时采用多传感器和卫星定位进行互补的方案,一方面GNSS作为外部量测值输入,在组合导航中不断修正INS,以控制其误差随时间的积累;另一方面,短时间内高精度的INS定位结果,可以很好地解决GNSS动态环境中的信号失锁和周跳问题。不仅如此,INS还可以辅助GNSS接收机增强其抗干扰能力,提高捕获和跟踪卫星信号的能力,增强灵敏度和可靠性。解决了卫星信号下降或失效时输出定位结果误差较大的情况,提高了列车定位的精确性、实时性、可靠性和抗干扰性,从而保障列车能安全快速地运行。

图1 GNSS的列控系统定位原理图
2 应用研究现状
自2000年起,欧盟就开始了GNSS在列控系统中的应用研究,主要集中在ETCS的最高级别和区域性线路,即ETCS L3和ETCS Regional上。研究主要通过持续资助一些科研项目来推动应用。首批主要项目有APOLO[4],GADEROS[5]和LOCOP- ROL[6],截止到最近的GaLoROI[7]和3inSat[8],已经进行了数十个项目。所有这些项目,虽然还没有生产出商业化运营的产品,但也在不断推动GNSS在铁路领域的技术渗透。其中最具代表性的就是出现了“虚拟应答器”的概念,其基本原理是采用虚拟的点代替真实的物理应答器,将其坐标记录在嵌入式地理数据库中,通过将基于GNSS的列车位置与数据库进行比较来检测火车在通过所识别的点时的位置,从而起到代替传统应答器的目的。自RUNE[9],3InSat和ERSAT等项目启动以来,虚拟应答器已经在许多项目中得到了广泛的研究。而下一代列车控制系统计划(Next Generation Train Control, NGTC),项目已经启动,其中一项主要研究内容就是面向线路布置及环境较为开阔的低密度线路,研究标准的卫星定位功能应用,替代传统物理应答器[10]。
3 定位性能分析与需求
3.1 列控系统中GNSS定位性能分析方法
当前公认用于评价GNSS性能的指标参数是国际民用航空组织规定的精度、完好性、连续性和可用性四项基本性能指标。而铁路领域通常采用可靠性,可用性,可维护性和安全性(Reliable, Availability, Maintainability, Safety, RAMS)来进行评价系统性能,二者之间并没有直接的对应关系。同时,铁路的运营规则以及相关标准的实施策略与航空用户是截然不同的,因此不能将航空领域的GNSS性能需求直接照搬到铁路上来。
要验证列控系统中基于GNSS的定位单元性能是否满足应用需求,就必须实现系统间性能参数的有效映射。当前应用较为广泛的为Flip等[11]提出的关系模型,如图2所示。文章中给出了在伽利略系统定位性能参数和RAMS之间的关系模型,并给出了各参数定义及计算方法。此外,Filip等[12−13]研究了2类指标之间的关系,将不同领域的定位性能标准联系起来,研究了适用于GNSS的RAMS评价方法。Mocek等[14]在RAMS性能需求的基础上,提出了基于GNSS的列控系统需要达到的最低量化需求。

图2 GNSS和列控系统定位性能指标关系图
3.2 定位性能需求量化指标
从图2可以看出,基于GNSS的列控系统定位性能需求,与传统性能需求是有着较大区别的。举例来说,传统的应答器在轨道上的位置是精确已知的,而采用GNSS定位时,则需要考虑位置信息的精度问题,而对于不同情景下,对精度的需求是不同的。在如图3所示,当列车位于轨道交叉点上时,等待入轨的列车位置必须是精确可靠的,且精度指标要远远高于行驶过程中的定位精度,才能保证不会与另一轨道上的列车相撞。
而对于图4采用虚拟应答器实现移动闭塞时,在向等待列车提供移动权限之前,必须确保和之间的轨道是空闲的,这就意味着在捕获下个虚拟应答器之前,必须要确定前方列车已经通过了该应答器[15],这就要求列车相对于虚拟应答器的距离必须要满足相应的精度需求,尤其是列车尾部的定位精度需求。

图3 铁路轨道交叉点示意图

图4 基于虚拟应答器的移动闭塞
当前列车运行控制系统领域的列车定位性能统一标准尚在研讨中,当前应用较为广泛的需求标准如表1所示。

表1 不同密度铁路线路下GNSS定位性能需求
此外,很多项目实施过程中也对量化指标进行了研究[7−9, 16],部分文献以表1中指标为基础,给出了较为全面的综合指标,还有部分给出了按不同应用进行分类量化的精度和完好性需求指标。
虽然当前列车运行控制系统领域的列车定位性能暂未形成规范的标准,但是基于GNSS以及各国正在积极发展的各类增强系统中都希望更多的行业用户参与特定应用中性能标准的制定。随着卫星定位铁路应用研究的不断深入,铁路列车定位功能性能要求下的卫星导航系统性能指标及量化水平要求也逐渐走向标准化、规范化。
4 基于GNSS的列控系统定位方法
目前欧盟大多数项目中定位方法研究目标都是以保证最高精度、可用性或完好性的,不同项目中,制定的目标也不同。本节主要介绍以精度和可用性及以安全性为基础的定位方法。
4.1 基于精度和可用性的定位方法
火车不同于飞机,其行驶过程中会接近很多遮挡信号的障碍物,如高层建筑、树木以及隧道等。而GNSS在此类特殊环境下性能很差甚至无法定位,显然不能达到需求的可用性和高精度,更不用说高度的安全完整性了。当下主流的解决方案以GNSS与多传感器融合为主,图5为一种典型的GNSS+多传感器融合定位方案。
如图5所示,在卫星定位有效的情况下,GNSS可以提供有效准确的列车位置,同时用来修正惯性导航系统的误差,并根据高精度数字轨道地图信息,修正卫星/惯导组合导航系统计算位置在轨道垂直方向上的误差,最终将得到可靠的融合定位结果。而在卫星信号失锁或遭到遮挡时,由于无法获取卫星的观测信息,系统对车轮传感器/惯性导航系统进行组合定位,利用惯性器件、车轮传感器等辅助设备进一步构建卫星增强多传感器系统,用以提供一定精度的连续定位信息,同时结合高精度数字轨道地图信息,修正车轮传感器/惯导组合导航系统所计算的列车位置在轨道垂直方向上的误差,保证列车定位信息在卫星定位失效时的连续性。
当前研究的热点在于如何科学合理的选择传感器的组合,结合有效的信息融合算法,充分实现其与GNSS之间的优势互补,获取高精度、高可靠性的定位结果。Acharya等[17−19]对不同深度的组合定位方式(松耦合、紧耦合和深耦合)进行了阐述和分析。此外,GNSS+多传感器融合可以与地图匹配技术相辅相成[20-21]。Neri等[22]介绍了一种基于轨道约束的新型双差分定位算法,该方法可以同时保证位置信息的精度、可用性、可靠性以及和地图的一致性。

图5 GNSS+多传感器组合定位原理图
4.2 基于安全性的定位方法
安全性指的是系统不发生可能引起损害风险的能力。由图2可以看出,安全性主要与完好性有关,因此现有列控系统中基于安全性的定位方案大多都是以提高GNSS完好性为主,相关技术大致可以分为两大类。
4.2.1 完好性监测技术
这类技术的研究主要集中在接收机自主完好性监测算法(Receiver Autonomous Integrity Monitor- ing, RAIM)算法上,算法可以给用户提供完好性监测和快速报警的响应能力。主要包括2部分研究内容:一是对影响定位精度的故障进行有效检测和排除;二是判定当前历元定位系统的完好性风险是否超限。上述情况有任何一类发生,则向用户告警。
早在1998年,Mirabadi等[23]就提出了基于卡方检验和残差检验的故障检测和隔离方法,并将其应用到列车多传感器定位系统中;Nikiforov等[24]将一种RAIM故障检测识别算法引入到上述LOCOPROL的定位方案中,其中LOCOPROL定位系统负责确定满足定位需求的列车位置区间,故障检测识别算法用以区间长度的合理性及可用性;LIU等[25]针对多传感器定位系统提出了自主完好性监测(Autonomous Integrity Monitoring and Assur- ance, AIMA)方案。此外,还有一些研究利用先验知识库、多普勒信息、图像处理等技术来辅助完好性监测[26]。
4.2.2 星基增强技术
这类技术主要以EGNOS为基础。EGNOS是欧洲的SBAS系统,由大量分布广泛的监测站(位置已知)对导航卫星进行监测,由地球同步卫星(GEO)向用户播发改正数信息(星历误差、卫星钟差、电离层延迟)和完好性信息(用户差分距离误差、格网电离层垂直误差),实现对卫星导航系统定位精度的改进和完好性性能的提高。常规方法是利用EGNOS播发的完好性信息来计算用户水平保护水平(Horizo- ntal Protection Level, HPL),HPL是通过满足一定置信空间的完好性风险而计算出的水平方向定位误差的限值,其应用原理如图6所示。
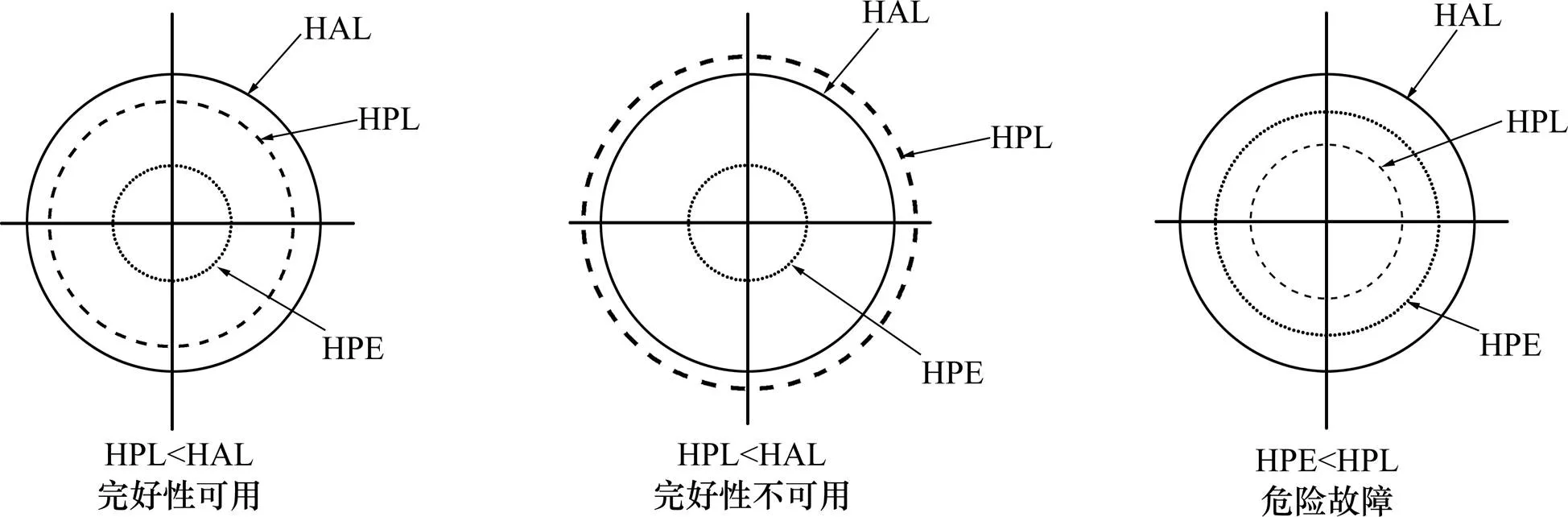
图6 星基增强完好性监测原理示意图
实际应用中,真正的HPE(水平位置误差)是未知的,因此通常采用HPL作为完好性的评价指标。如图6所示,当HPE 现有的利用EGNOS完好性信息计算HPL的模型算法多是针对航空领域应用的,STARS项目中已经验证了此类模型算法并不能直接用在铁路领域。文献[27]研究了一种可以应用与高速公路的HPL计算方法,计算出的HPL<8 m,但在城市环境下,测试时间内只有15%的时间基于EGNOS的定位系统满足完好性需求,主要原因就是因为卫星信号接收环境较差,存在过多干扰和遮挡。针对此类情况,3inSat项目设计了一种本地完好性监测网络(Aug- mentation and Integrity Monitoring Network, AIMN),旨在利用航空领域的GNSS、SBAS和ARAIM相结合,开发适用于铁路的高完好性覆盖的导航系统,Neri等[28]的研究表明,该网络可用性非常高,并且可以大大降低HPL的值,实现完好性监测和定位精度的提高。 确定了定位方案后,下一步就是评估定位系统的性能是否满足相关应用需求。涉及到的主要有2个问题:一是评估环境的选取;二是评估方法的 确定。 经典评估环境分为2种:实验室仿真和现场试验。实验室仿真方法具有重复性,可以控制所有测试条件,且成本较低。Shift2rail项目就是专门研究一种在实验室中使用仿真工具和演示程序开发的非现场测试方法。此外,CEIT公司已经研制出一种高级列车定位模拟器(Advanced Train Location Simulator, ATLAS),并且已经应用于EATS项 目中[29]。 相对于实验室仿真,现场试验更具有说服力。当前欧洲大多数试验项目都是基于现场试验的。LOCOPROL项目在比利时的乡村线路、法国南部的山区线和意大利的高速线上开展了定位方案试验;SATLOC项目在罗马尼亚的一条低密度铁路上进行了定位性能测试[30];ERSAT EAV项目在撒丁岛一条长达50 km的铁路上验证了多星座接收机的定位性能,同时在GNSS不可用区域验证了局域增强网络的定位性能[31-32]。 此外,SATLOC项目中提出了一种实验室仿真和现场试验相结合的方法,提出在GNSS信号不可用时,可以采用GNSS信号模拟器作为替代方案,保证GNSS定位的连续可用性。 列控系统定位单元评估方法的选取,很大程度上取决于定位单元架构的复杂性,欧洲现有的基于GNSS的位置确定系统(Location Determination System,LDS)大体有3部分构成: 1) 硬件部分(GNSS、里程表、惯导系统等),主要负责给出位置信息; 2) 改正信息,通常由数字地图数据库或卫星增强系统提供; 3) 软件算法,主要用于异构信息融合以及故障检测。 对于由独立GNSS接收机构成的LDS的RAMS评估方法,除了3.1节中提到的经典方法以外,欧洲很多专家学者对GNSS定位单元的RAMS性能评估方法进行了拓展研究:Beugin等[33]在Flip A提出的关系模型基础上,进一步诠释了铁路应用中GNSS各项性能指标的定义,并通过仿真方法评估了列车定位中的GNSS性能,分析了其在不同环境的可用性和可靠性;LU等[34]比较分析了RAMS和GNSS性能,利用Petri网建立了GNSS定位性能状态模型,在此基础上给出了一种列车定位中GNSS的RAMS评估方法,并使用铁路实测数据对GNSS定位单元的RAMS性能进行了评估。结果表明:仅基于GNSS的定位性能还远远达不到铁路安全应用领域的性能需求。 Nguyen等[35]研究了一种基于GNSS+ECS定位方案的RAMS评估方法,评估方法中不仅考虑了定位性能,还考虑了硬件故障率以及故障模式之间的依赖性,最后利用Petri网模型,对该LDS进行了现场测试,测试结果表明这种GNSS+ECS结构不能满足可用性要求,特别是在森林环境中,必须使用冗余传感器来进行性能改进。 欧盟关于铁路领域GNSS的应用研究已经持续了十余年,期间研发出很多相关的技术方案,不断提升GNSS在未来铁路应用上的应用潜力,同时铁路各级部门对GNSS技术的兴趣也在不断增加,但要将其真正投入到铁路列车运营中去,仍有很多问题需要进一步深入论证和研究。 欧洲各国有很多铁路运营商都在研究如何利用GNSS改进列控系统定位性能,从节省成本的角度提升铁路运营效益。但目前实际投入运营的定位方案非常少,因为多数用户对于GNSS的应用性能还存有疑虑,对其是否能带来可观的经济效益还不确定。但随着后续ERTMS互操作性技术规范(Technical Specifications for Interoperability,TSI)的发布,以及GNSS技术的不断发展,成本及效益的论证工作也将逐步推进,效益的明朗化必然会增强用户对相关产品的信心,加快应用步伐。 当前GPS和GLONASS正在持续开展现代化,我国的BDS-3系统也将于2018年底为“一带一路”沿线各国提供服务,各国的SBAS也在不断发展之中,随之不断发展的多星座组合定位技术、星基/地基增强技术已然成为研究的热点以及提高GNSS定位性能的新举措。因此,如何根据具体应用需求在列控系统中引入合适的GNSS相关新技术,并建立合理有效的应用模型,是未来GNSS在列控系统中应用面临的一项挑战。 为了验证GNSS用于列控系统的实际能力,必须给出科学合理的评估方法,用以量化GNSS性能。当前对于GNSS定位单元RAMS性能评估方法的研究较为分散,还没有形成一个统一完整的评估体系。下一步研究的重点就是实现列控系统性能需求指标RAMS与GNSS服务性能指标完整映射,研究一种系统的、适用性强的评估方法,在实现GNSS定位单元RAMS性能评估的同时,将RAMS需求量化为对GNSS相关性能需求,为GNSS定位单元的性能改进提供依据。 建立起RAMS和GNSS性能指标之间的映射关系模型后,则需要制定科学合理的性能需求指标,实现其应用性能的定量评估。不仅可以为导航系统供应商提供可视化的铁路需求,促使其根据量化的性能差距,不断提升自身性能;同时也可以为各类GNSS增强系统的设计,提供一定的性能指标依据,拓展其在铁路领域的应用深度。 [1] 陈艳华. 轨道交通列车定位技术的选择与比较[J]. 电子设计工程, 2010, 18(11): 186−188. CHEN Yanhua. Selection and comparison of rail transit train positioning technologies[J]. Electronic Design Engineering, 2010, 18(11): 186−188. [2] 张新明, 陈源, 高媛. ETCS等级转换功能研究[J]. 铁道通信信号, 2017, 53(5): 5−9. ZHANG Xinming, CHEN Yuan, GAO Yuan. Research of the ETCS level transition[J]. Railway Signalling & Communication, 2017, 53(5): 5−9. [3] 刘江, 蔡伯根, 王剑, 基于卫星导航系统的列车定位技术现状与发展[J]. 中南大学学报(自然科学版), 2014, 45(11): 4033−4042. LIU Jiang, CAI Bogen, WANG Jian. Status and development of satellite navigation system based train positioning technology[J]. Journal of Central South University (Science and Technology), 2014, 45(11): 4033−4042. [4] Hosse R S, Manz H, Burmeister K, et al. Market analysis for satellite train localisation for train control systems[C]// Proc 5th Conf Transp Solutions Res Deployment Transp Res Arena (TRA), Paris, 2014: 1–10. [5] Urech A, Diestro J P, González O, et al. Galileo demonstrator for railway operation system[C]// Proc Data Syst Aerosp, Dublin, 2002: 46. [6] Mertens P, Franckart J P. Low-cost signalling on low-density lines[J]. Railway Gazette Int, 2003, 159(8): 498. [7] Manz H, Schnieder E, Becker U, et al. Approach to certification of satellite based localisation unit in railways[C]// Proc 5th Conf Transp Solutions Res Deployment Transp Res Arena (TRA), Paris, 2014: 1–10. [8] Rispoli F, Neri A, Senesi F. Innovative train control systems based on ERTMS and satellite-public TLC networks[J]. WIT Trans Built Environ, 2014(135): 51–61. [9] Albanese A, Marradi L, Campa L, et al. The Rune project: Navigation performance of GNSS-based railway user navigation equipment[C]// Proc Navitec, Noordwijk, The Netherlands, 2004. [10] 郭进. 我国下一代列车控制系统的展望与思考[J]. 铁道运输与经济, 2016, 38(6): 23−28. GUO Jin. Outlook and thoughts on next generation train control system in China[J]. Railway Transport and Economy, 2016, 38(6): 23−28. [11] Filip A, Beugin J, Marais J. Interpretation of the galileo safety-of-life service by means of railway RAMS terminology[J]. Transp Res C Emerg Technol, 2008, 1(2): 61–68. [12] Filip A, Mocek H, Suchanek K. Significance of the Galileo signal-in-space integrity and continuity for railway signalling and train control[C]// Proc 8th World Congr Railway Res (WCRR), Seoul South Korea, 2008. [13] Beugin J, Filip A, Marais J, et al. Galileo for railway operations: Question about the positioning performances analogy with the RAMS requirements allocated to safety applications[J]. Eur Transp Res Rev, 2010, 2(2): 93–102. [14] Mocek H, Filip A, Bazant L. Galileo safety-of-life service utilization for railway non-safety and safety critical applications[J]. J Mech Syst Transp Logistics, 2010, 3(1): 119–130. [15] Lauer M, Stein D. Algorithms and concepts for an onboard train localization system for safety-relevant services[C]// Proc IEEE Int Conf Intell Rail Transp (ICIRT), Beijing, 2013: 65–70. [16] Goya J, Zamora-Cadenas L, Arrizabalaga S, et al. Advanced train location simulator (ATLAS) for developing, testing and validating on-board railway location systems[J]. Eur Transp Res Rev, 2015, 7(3): 1– 18. [17] Acharya A, Sadhu S, Ghoshal T K. Train localization and parting detection using data fusion[J]. Transp Res C Emerg Technol, 2011, 19(1): 75–84. [18] Lüddecke K, Rahmig C. Evaluating multiple GNSS data in a multi-hypothesis based map-matching algorithm for train positioning[C]// Proc IEEE Intell Vehicles Symp (IV), Columbus, 2011: 1037–1042. [19] WANG J, YAN X H, CAI B G, et al. Research on deeply integrated GPS/INS for autonomous train positioning[C]// Proc IEEE 4th Int Symp Microw Antenna Propag EMC Technol Wireless Commun, Beijing, 2011: 687–690. [20] Saab S S. A map matching approach for train positioning development and analysis[J]. IEEE Trans Veh Technol, 2000, 49(2): 467−475. [21] LIU J, CAI B G, WANG J. A GNSS/trackmap cooperative train positioning method for satellite-based train control[C]// Proc IEEE 17th Int Conf Intell Transp Syst (ITSC), Dearborn, 2014: 2718−2724. [22] Neri A, Palma V, Rispoli F, et al. Track constrained PVT estimation based on the double-difference technique for railway applications[C]// Proc 21st Eur Signal Process Conf (EUSIPCO), Marrakech, 2013: 1–5. [23] Mirabadi A, Mort N, Schmid F. Fault detection and isolation in multisensor train navigation systems[C]// Control UKACC Int Conf, Loughborough, 1998: 969– 974. [24] Nikiforov I V, Choquette F, Belgium A T. Integrity equations for safe train positioning using GNSS[C]// Proc GNSS Eur Navigat Conf, Graz, 2003: 52–77. [25] LIU J, TANG T, GAI B, et al. Integrity assurance of GNSS-based train integrated positioning system[J]. Sci China Technol Sci, 2001, 54(7): 1779–1792. [26] Marais J, Tay S, Flancquart A, et al. Weighting with the pre-knowledge of GNSS signal state of reception in urban areas[C]// Proc Eur Navigat Conf (ENC) GNSS, Bordeaux, France, 2015. [27] Ali K, Pini M, Dovis F. Measured performance of the application of EGNOS in the road traffic sector[J]. GPS Solutions, 2012, 16(2): 135–145. [28] Neri A, Filip A, Rispoli F, et al. An analytical evaluation for hazardous failure rate in a satellite-based train positioning system with reference to the ERTMS train control systems[C]// Proc 25th Int Tech Meeting Satellite Division Inst Navigat (ION GNSS), Toulouse, France, 2012. [29] Arrizabalaga S. Development of an advanced testing system and smart train positioning system for ETCS applications[C]// Proc Transp Res Arena (TRA) 5th Conf Transp Solutions Res Deployment, Paris, 2014. [30] Barbu G, Marais J. The SATLOC project[C]// Proc TRA-Transp Res Arena, Paris, 2014: 10. [31] Rispoli F, Castorina M, Neri A, et al. Recent progress in application of GNSS and advanced communications for railway signaling[C]// Proc Radioelektronika, Beijing, 2013: 13–22. [32] Senesi F. Satellite application for train control systems: The test site in Sardinia[J]. J Rail Transp Planning Manag, 2013, 2(4): 73–78. [33] Beugin J, Marais J. Simulation-based assessment of dependability and safety properties of satellite technologies for railway localization[J]. Transportation Research Part C, 2012(22): 42−57. [34] LU Debiao, Grasso Toro Federico, Schnieder Eckehard. RAMS Evaluation of GNSS for railway localisation[C]// IEEE, Beijing, 2013. [35] Nguyen T K, Beugin J, Marais J. Method for evaluating an extended Fault Tree to analyse the dependability of complex systems: Application to a satellite-based railway system[J]. Rel Eng Syst Safety, 2015(133): 300−313. A review of application research and development of GNSS in European train control system SHUAI Weiyi1, DONG Xurong1, CONG Lei2, ZHANG Bixiu3, WANG Weishu4, FAN Xiangxiang1 (1. Space Engineering University, Beijing 101416, China; 2. Troops 63629, Beijing 100162, China; 3. Troops 93897, Xi’an 710003, China; 4. School of Electronic and Information Engineering, Beijing Jiaotong University, Beijing 100044, China) Starting with the application advantages of GNSS in the train control system, principle of GNSS-based train positioning is introduced. Based on the application of GNSS in European train control system, its application research status, positioning performance analysis method and requirements index, existing positioning method and performance evaluation were reviewed and analyzed. Finally, prospects and challenges of its application were presented correspondingly. GNSS; train control system;positioning; requirements; performance assessment U284 A 1672 − 7029(2019)07− 1781 − 09 10.19713/j.cnki.43−1423/u.2019.07.024 2018−10−10 国家重点研发计划资助项目(2018YFB1201500);国家自然科学基金资助项目(61703034);北京市自然科学基金资助项目(4184096) 帅玮祎(1991−),女,河北承德人,博士研究生,从事GNSS在铁路领域的应用研究;E−mail:18803348431@163.com (编辑 蒋学东)5 性能评估
5.1 评估环境的选取
5.2 评估方法的确定
6 未来应用研究前景与挑战
6.1 成本和收益的论证
6.2 GNSS新技术的引入
6.3 性能指标映射关系的建立
6.4 性能需求指标的制定
