四通道微光偏振实时成像光学系统设计
2019-03-23贾春辉杨书宁
贾春辉,高 明, 杨书宁
(1.西安工业大学 光电工程学院,陕西 西安710021;2.微光夜视技术重点实验室,陕西 西安 710065)
引言
在光照环境极其微弱的情况下,光电设备对目标的侦查能力受到空间、时间光谱及灵敏度等因素的限制导致目标与背景对比度降低,成像质量下降而无法完成侦查探测任务。如何改进微光成像光学系统,加强其探测能力和提升成像质量,依然是一个备受关注的研究方向[11]。偏振成像技术可以探测目标表面的偏振信息,因此可以提高光电设备在相同场景下对目标的探测能力[12,15]。最初,偏振成像系统多为分时型,在采集目标时,需要多次成像,系统引起的误差较大,虚假偏振信息过多。为了能够同时获取动态场景全部偏振信息,实时成像系统应运而生,解决了分时系统存在的问题。Taylor等人[1]最早设计了一套微光电视光学系统,完成了在空域和时域对偏振态的测量;Sean Moultrie等人[2]基于孔径分割技术,结合尼康变焦镜头,设计了子孔径成像镜头组,组合实现了可用于微光条件下的可见光偏振成像系统,虽然实现了实时偏振成像,但镜头并不是完全匹配微光设计,光谱范围未涵盖微光波段,镜头成像分辨率低。2014年,陈振跃等[8]研究了基于高灵敏度CCD的孔径分割偏振成像系统,实验表明能够提高成像对比度,但系统同样是结合已有变焦镜头,仅设计子通道成像镜头并配以激光辅助照明,缺点是光谱范围太窄且属于主动夜视。2015年,茹志兵等[6]设计了基于三代像增强器和高动态范围数字CCD的分时偏振成像的微光成像系统,设计了相应大口径成像物镜和中继光学耦合透镜,存在的问题是系统为分时成像系统,且利用三代像增强器,系统整体笨重,偏振探测灵敏度低。近年国外研制出分焦平面的偏振传感器[5,13],单个像元对应单个偏振通道,3~4个像元及微偏振片组成一个偏振成像单元,成像效率高,但目前这种技术对器件加工工艺水平要求较高。
综上所述,根据已有报道,在微光偏振成像领域,国内完全自主设计的微光偏振实时成像光学系统较少。本文基于孔径分割技术[7],设计了共口径四通道微光偏振实时成像光学系统,可实现在最低照度1×10-3lx环境下实时偏振成像。
1 偏振成像系统原理
设计共口径四通道微光偏振实时成像光学系统,其光学系统结构如图1所示。

图1 共口径四通道微光偏振实时成像系统结构Fig.1 Common-aperture four-channel LLL polarization real-time imaging system structure
通过将同轴微光光学系统在光阑处进行离轴化,使整个光学系统形成4个独立的成像通道,结合偏振成像原理,通过放置4个完全相同的成像透镜组,并在成像光路中放置4个起偏状态不同(0°、45°、90°、135°)的线偏振片进行偏振成像,通过每个成像通道实时获取同一目标不同偏振方向的强度图像。
偏振信息可用Stokes矢量描述,Stokes矢量用4个具有强度量纲的参量来表征偏振状态[13],且可被探测器直接探测,其形式为
(1)
式中:I表示成像系统接受到的光波总强度;Q表示水平、垂直2个偏振方向的强度差;U表示2个对角线方向的强度差;V表示左、右旋圆偏振分量的强度差。确定了光束的Stokes矢量之后,偏振度(degree of polarization,DoP)和偏振角(angle of polarization,AoP)可由式(2)计算得到:
(2)
当V=0时,偏振度退化成线偏振度(degree of linear polarization,DoLP)为
(3)
光学元件或系统对入射斯托克斯向量的影响可以用4×4穆勒矩阵来描述,其定义如下:
(4)
入射光学系统的入射辐射量可用斯托克斯矢量Si=[IiQiUiVi]T表示,经过光学系统后的出射辐射量可以用斯托克斯矢量So=[IoQoUoVo]T表示。两者直接可以通过穆勒矩阵建立连接,即:
So=M·Si
(5)
则成像设备接收到的强度为
I=M11Ii+M12Qi+M13Ui+M14Vi
(6)
通过4次改变成像系统的偏振状态,可得到类似于公式(6)的4个公式。它们中的任意2个彼此独立,则可以从4个强度方程计算斯托克斯参数。一般情况下,自然大气背景及目标物对太阳入射的偏振效应中,圆偏振分量极少,故V=0,除V之外所有的斯托克斯参数可以从3个强度方程中计算出来。
对于多个通道实时偏振成像来讲,探测成像示意图如图2所示。
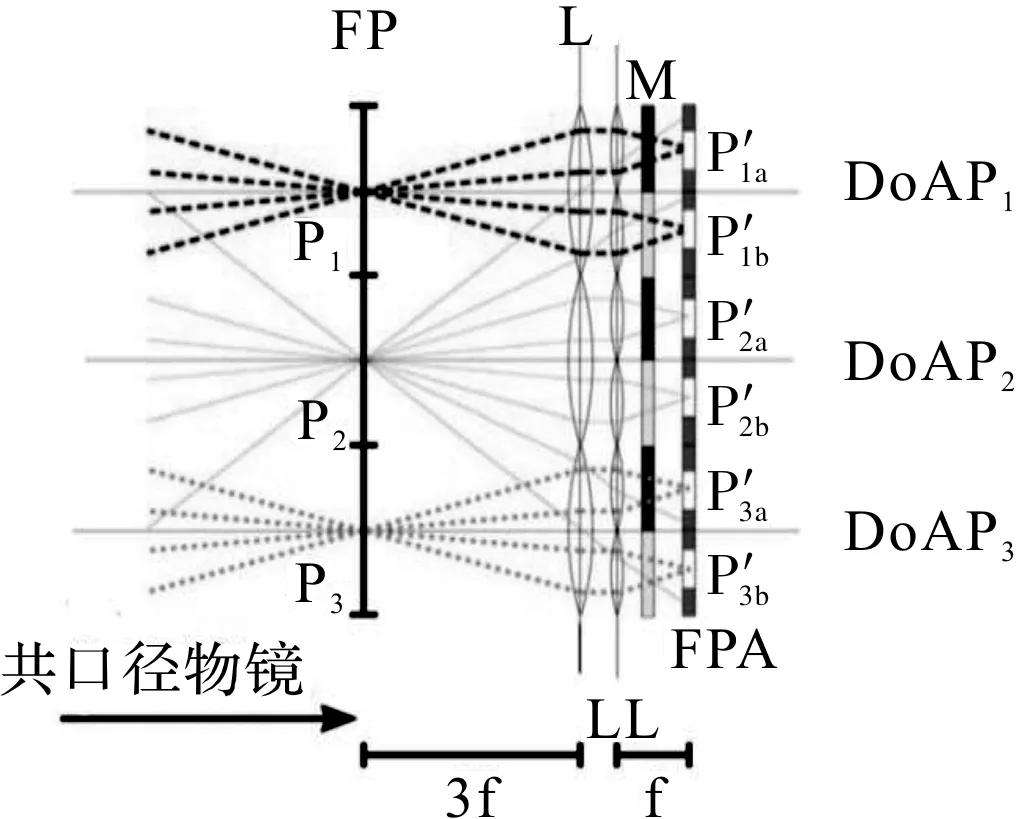
图2 多通道实时成像系统Fig.2 Multi-channel real-time imaging system
图2中FP为分割的视场通道,L为成像透镜组,M表示偏振组件、FPA表示面阵探测器焦面,DoAPi表示分孔径通道。由于横向2个通道视图中重叠,因此图2中用3个通道来代替显示。则探测偏振强度可写成
(7)

2 光学系统设计
微光条件下,为了使光电设备得到高质量的强度图像,要求所使用的探测器必须具有高灵敏度、高动态范围以及高增益。同时,由于分孔径成像通过分割探测器靶面的方式会带来分辨率损失问题,因此需选择高分辨率大靶面探测器来提供大的成像分辨率,以保证单通道成像分辨率。
微光机芯采用国产化CIS2003芯片,能够在星光条件下(1×10-3lx)连续输出清晰真彩色1 080 pixel全高清图像,适应实时观察及低照度的应用需求,由于芯片成像靶面不含有微透镜阵列,因此在系统设计中,不需要实现光路远心要求。
2.1 系统设计参数
系统工作环境最低照度为1×10-3lx,F数为1.2,中心波长为0.6 μm,另根据所选择的探测器及相关要求最终确定所设计的系统指标参数如表1所示。
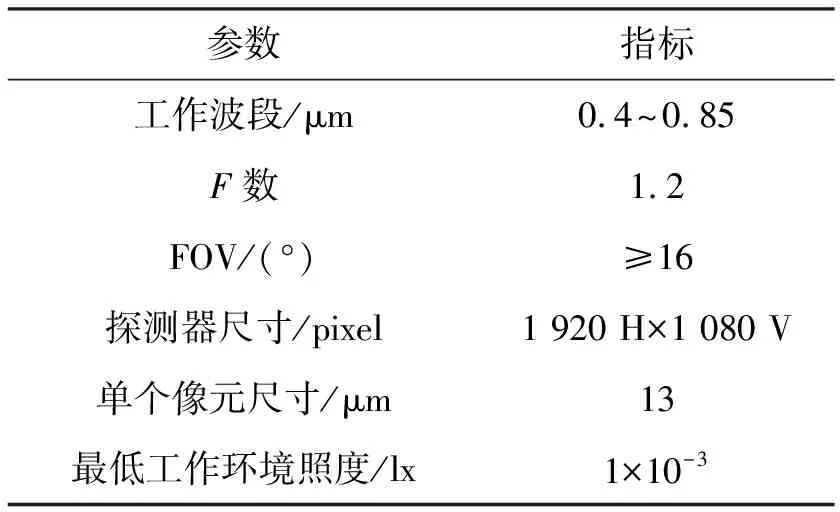
表1 系统设计参数Table 1 System design parameters
探测器的奈奎斯特频率Nn的计算方法为
(8)
通过上式计算,结合微光探测特性,同时为保证分孔径后单个成像通道分辨率,取40 lp/mm作为评价光学系统光学传递函数的最大参考空间截止频率值。
根据选择的CCD探测器横纵像元数及单个像元尺寸,可得到光学系统对角线尺寸为
(9)
式中:M、N分别表示探测器的横、纵像素数。探测器像元数为1 920 H×1 080 V pixel,像元大小为13 μm,由公式(6)可计算出像面对角线约为28.63 mm。
系统由4个完全相同的分孔径成像镜组成像于探测器靶面,根据靶面大小对CCD进行四象限分割,探测器靶面分割及子孔径示意图如图3所示。故单个偏振通道成像所占用CCD外接圆的对角线尺寸约为14.315 mm。
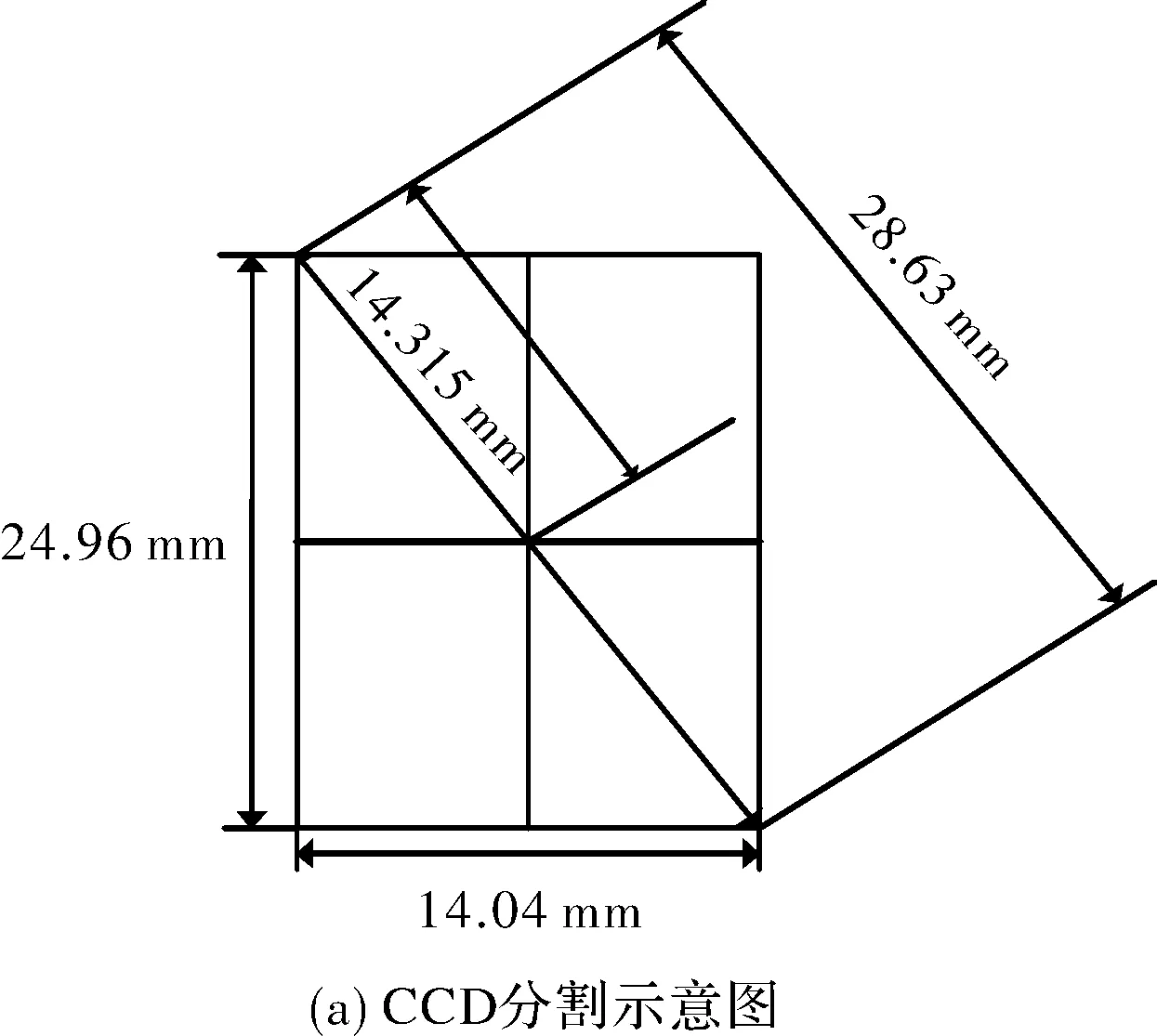
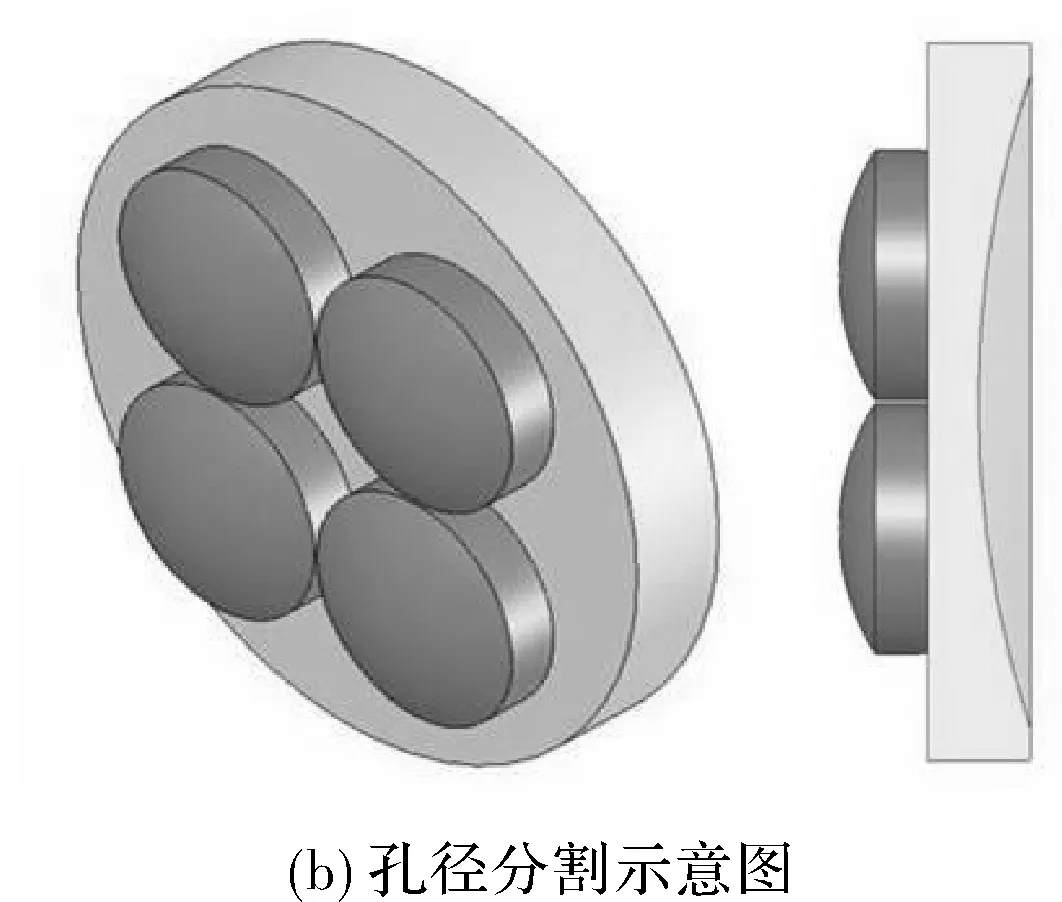
图3 CCD及孔径分割示意图Fig.3 Diagrams CCD and aperture division segmentation
2.2 初始结构搭建
为扩大系统相对孔径,在双高斯结构的基础上,增加两片透镜搭建同轴偏振成像系统,得到初始结构如图4所示,系统参数如表2所示。
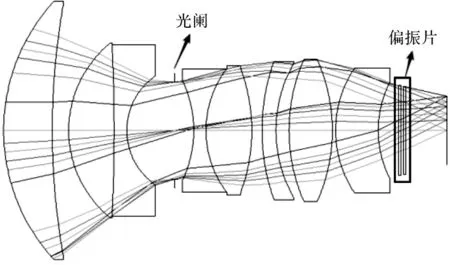
图4 同轴系统初始结构Fig.4 Initial structure of coaxial system
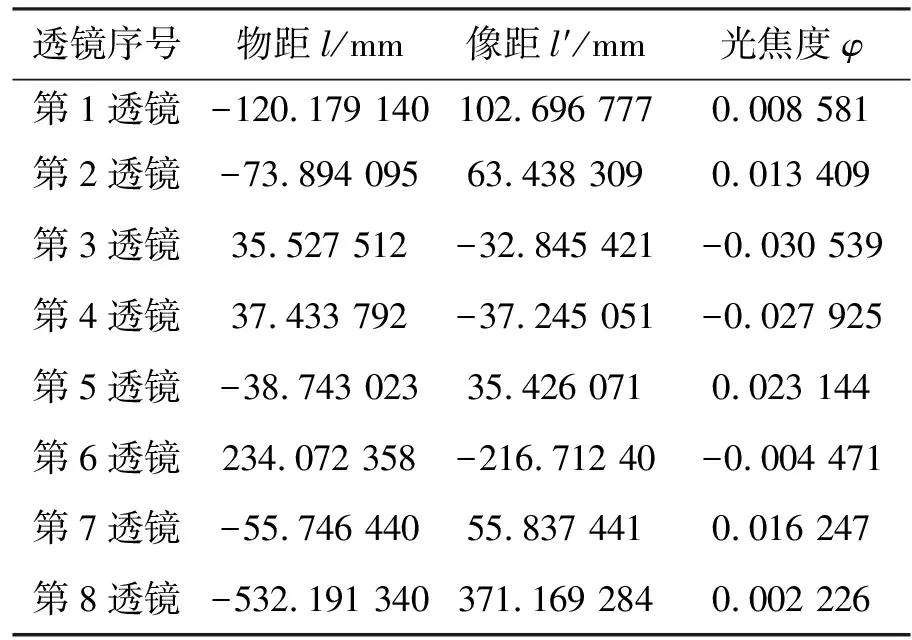
透镜序号物距l/mm像距l′/mm光焦度φ第1透镜-120.179 140102.696 7770.008 581第2透镜-73.894 09563.438 3090.013 409第3透镜35.527 512-32.845 421-0.030 539第4透镜37.433 792-37.245 051-0.027 925第5透镜-38.743 02335.426 0710.023 144第6透镜234.072 358-216.712 40-0.004 471第7透镜-55.746 44055.837 4410.016 247第8透镜-532.191 340371.169 2840.002 226
为实现孔径分割同时保证系统整体体积相对较小,通过向后移动光阑位置到第6透镜前面,初步离轴光阑面设置并简单优化设计,得到共口径偏振成像单通道光学初始结构如图5所示。
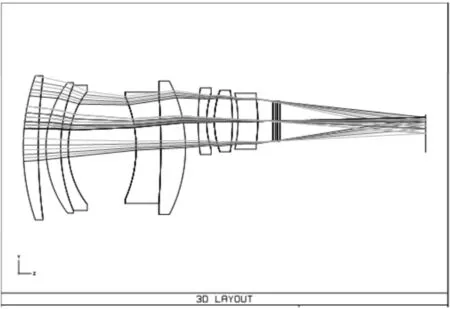
图5 系统单通道初始结构Fig.5 Diagram of initial structure of system
共口径部分由一片单透镜及2个双胶合透镜组成,子孔径成像组由3个单透镜组成。表3给出光学系统单通道初始结构的各项初级像差,由表可得初始结构球差、彗差、像散均较大,其他初级像在0.01左右,系统需进一步完善设计。

表3 初始结构初级像差Table 3 Primary aberrations of initial structure
2.3 设计结果
系统由前置共口径物镜组,孔径分割成像镜头组及后置偏振组件构成。设计得到具体的光学结构如图6所示,四通道渲染光学结构如图7所示。
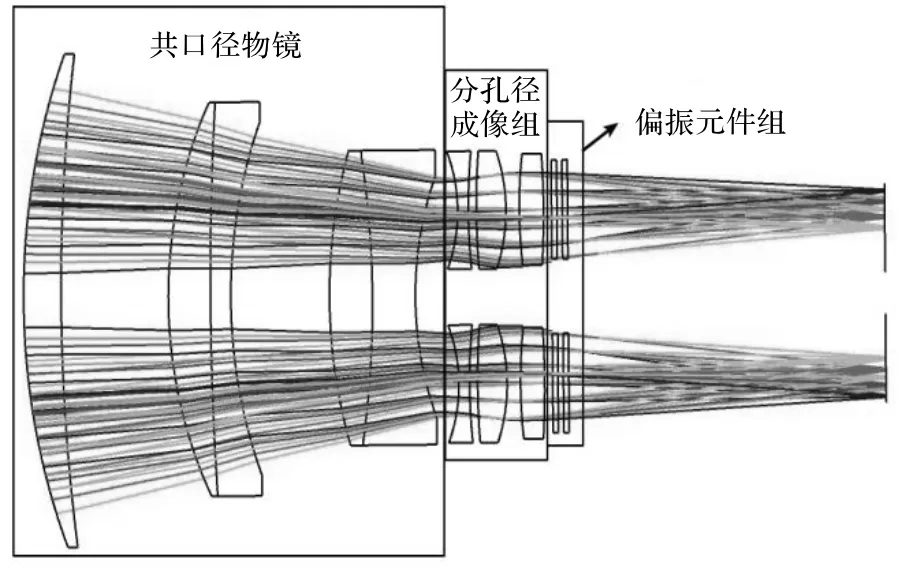
图6 微光实时偏振光学系统Fig.6 LLL real-time polarization optical system
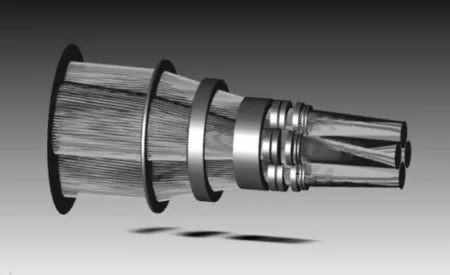
图7 光学系统渲染图Fig.7 Optical system rendering
系统实现单个成像通道设计指标为像高14 mm,系统焦距100 mm,4个通道除偏振组件外透镜各参数完全一致,成像引入的差异最小,保证后续信息处理及图像处理阶段的方便、快速性等特点。得到的单个通道凝视视场像高大小如表4所示。
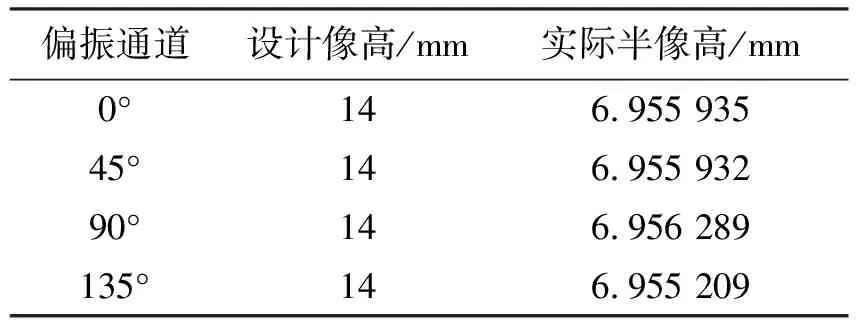
表4 各通道凝视视场像高Table 4 Image height in gaze field of each channel
由于系统存在一定量的光学畸变,实际像高小于14 mm,各个通道像高大小与设计值最大差值小于0.005 mm。
四通道成像将探测器划分为四象限成像,系统光线追迹示意图如图8所示,整个系统成像完全对称。
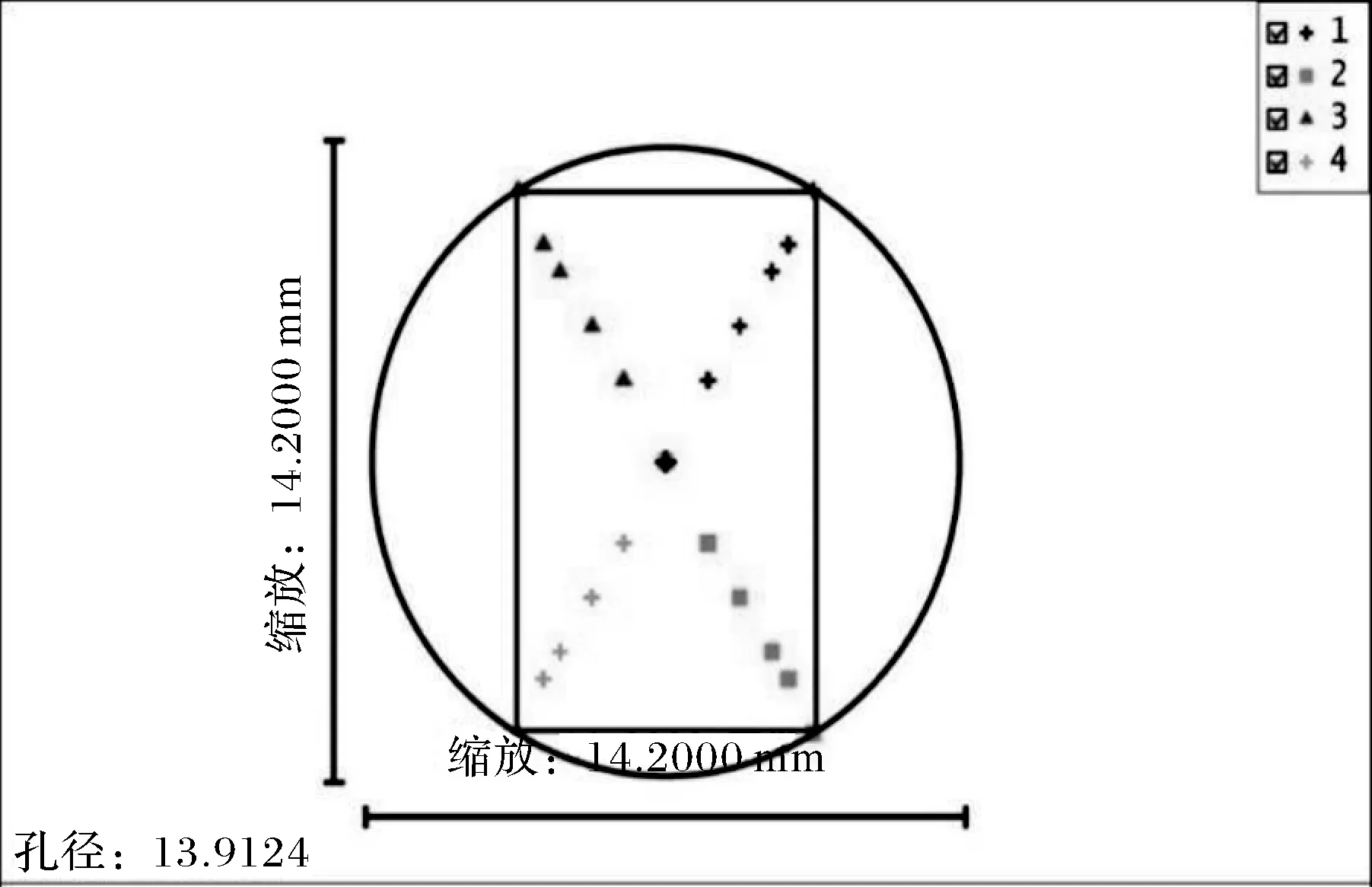
图8 探测器光线追迹图Fig.8 Detector ray trace
3 像质评价
针对微光夜视系统,像差及像质评价主要考察传递函数、衍射能量集中度、点列斑大小以及相对照度。系统MTF曲线如图9所示,在奈奎斯特频率为40 lp/mm处所有视场均不小于0.6,成像质量良好。
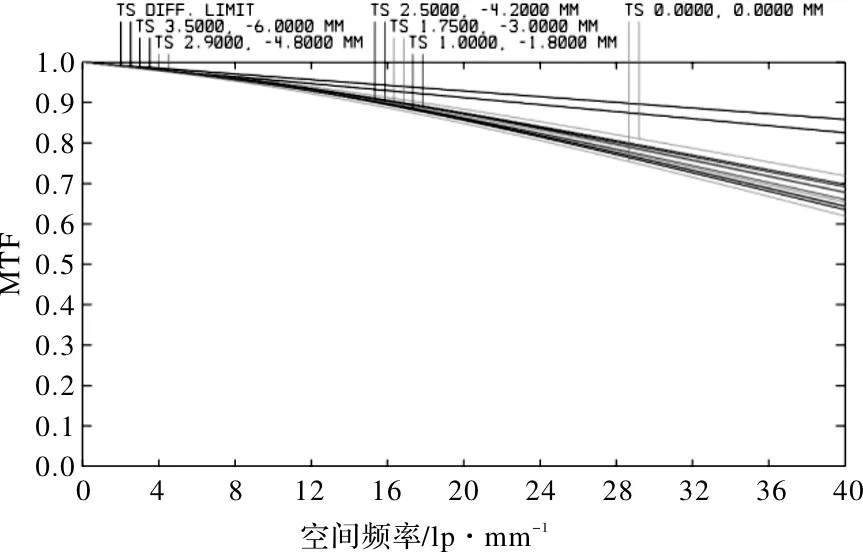
图9 系统MTF特性曲线图Fig.9 System MTF characteristic curve
系统的单个像元大小内衍射能量集中度曲线如图10所示。从图10中可以看出,系统在单个探测器像元范围内的衍射能量集中度大于0.9,能量集中度较高。

图10 衍射能量集中度曲线Fig.10 Diffraction energy concentration curve
微光成像光学系统本身工作环境光照环境差,因此对系统相对照度有一定要求,图11为单通道光学系统相对照度曲线图。从图11中可以看出,系统单通道相对照度各个视场均大于75%,可以正常成像,且像质良好。
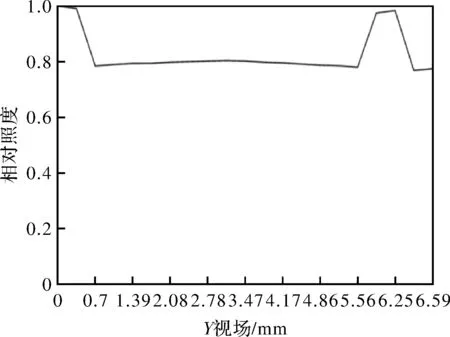
图11 相对照度曲线图Fig.11 Relative illumination curve
系统探测器单个像元尺寸大小为13 μm,最终设计结果各通道点列斑最大尺寸均小于3倍的像元大小且一致性较好,具体参数如表5所示。
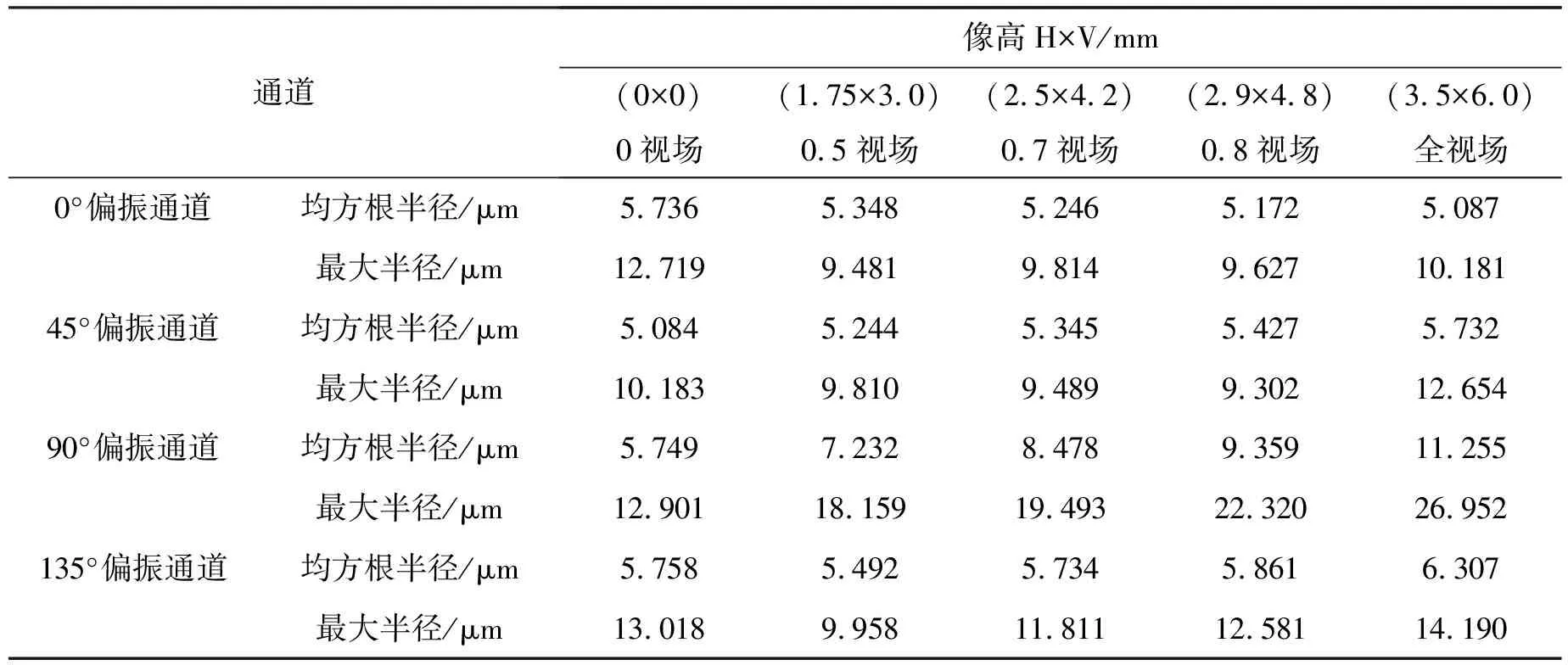
表5 各个通道点列斑大小Table 5 Spot size for each channel point
光学系统的相对孔径直接决定系统聚光能力。但由于微光光电设备普遍工作在低照度环境,因此无法单一地以相对孔径大小来评价设备聚光能力的强弱,因此国内外用T数来作为另一个衡量标准。T数是针对视距和分辨能力之间转换的一个评判标准,需要根据光学系统对分辨率的要求结合物镜焦距及通过口径的大小,最后得出T数数值。
根据T数定义:
(10)
式中:f′为物镜焦距;D为物镜有效孔径;Τ为透过率。
可计算出本微光偏振成像光学系统T约为1.342。国军标要求焦距在100 mm以下、相对口径为1/1.296的最低T数值不小于1.25,因此该偏振成像系统的设计满足实际使用要求。
4 成像质量公差分析
光学系统在实际加工和光学装调过程中会存在厚度、间隔、面型及元件的倾斜和偏心等误差,如果误差很大,会严重影响光学系统的成像性能,因此一个完善的设计必须按照目前的主流加工工艺水平,对光学系统进行公差分析,并进行合理的公差分配使系统成像性能达到最佳。
公差分析的方法主要有Rms spot radius法、Rms wavefront法、Diff.MTF 法。其中MTF是一种直观全面的像质评价方法,因此利用MTF法,考察系统MTF曲线的下降程度。
传统光学系统会在镜片间装上隔圈,通过修切隔圈保证间距公差,同轴度[14]靠镜筒结构精度保证。本文四通道孔径分光偏振成像系统由于四路完全对称,要保证后端探测器上获取的四幅图像完全一致,则子孔径成像组镜片性能要求完全一致。由于本系统设计思想在于光阑处离轴分孔径成像,因此偏心及倾斜公差对于加工及装调尤为重要,所以必须在设计完成阶段需要对子孔径成像组的加工公差进行分析,给出明确的公差容限范围。另根据实际工程经验,同时需要保证光学系统在公差容限内,系统传递函数全视场在40 lp/mm处大于0.3。
结合设计经验,对系统进行初始公差分配,表6为初步光学系统统一公差分配表。

表6 光学零件/装配统一公差分配表Table 6 Uniform tolerance distribution for optical parts/optical assemblies
表6中TFRN为光圈公差,TIND为折射率公差。
运用光学设计软件Zemax的公差分析功能,设定系统焦面到最后一面透镜的距离为补偿量,按照公差分配表进行衍射MTF均值分析,得到光学系统单通道MTF分布如图12所示。
从图12中可以看出在初始分配的公差容限下,系统MTF下降量在0.3左右,传递函数下降严重将导致光学系统最终像质变差,不符合实际工程要求。为确保实际光学系统在公差容限内传递函数在40 lp/mm处大于0.3,因此按照分析结果对部分影响严重的面型及元件间倾斜偏心重新进行公差分配,分配结果如表7所示,未重新分配面按照表6公差分配。

图12 公差分析MTF曲线分布图Fig.12 Tolerance analysis MTF curve distribution

面序号初次TIRX(Y)分配收紧TIRX(Y)公差初次TFRN分配收紧TFRN公差初次TSDX(Y)分配收紧TSDX(Y)公差10~120.050.03540.050.0212~150.050.025530.050.033~50.050.04540.050.03
再次运用Zemax的公差分析功能,进行Monte-Carlo分析,得到光学系统单通道MTF分布如图13所示。

图13 公差分析MTF曲线分布图Fig.13 Tolerance analysis MTF curve distribution
通过公差二次分配,从图13中可看到最差MTF下降到0.4。具体传递函数分布概率如表8所示。
从表中可以看出在分配的公差容限下,系统MTF下降量在0.1左右,有90%的概率光学系统MTF值在0.57之上,80%的概率MTF值高于0.6046,因此公差分配是合理的,所设计的共口径四通道微光实时偏振成像光学系统符合实际加工水平,满足设计及实际使用要求。
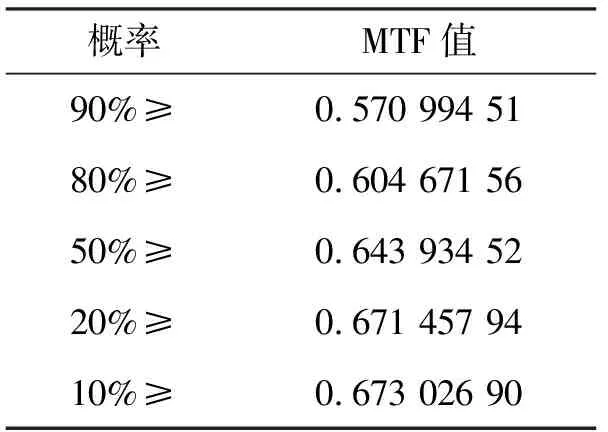
表8 公差分析MTF值Tab.8 Tolerance analysis MTF value
5 结论
本文根据光的偏振特性,结合微光夜视成像原理,按照偏振成像技术的具体指标要求,设计共口径四通道微光偏振实时成像光学系统。系统主要由共口径物镜和4个偏心分孔径成像镜头组成,且各个通道均成像质量较好,能够通过一次曝光实时获取动态目标的同一时刻的4个偏振分量的强度图像,通过偏振解算便可以得到完整的Stokes信息。通过对系统进行像质评价,并进行成像质量公差分析,结果显示设计的光学系统MTF值在40 lp/mm处全视场高于0.57。后续将进行加工制造,并进一步研究分焦平面高分辨率实时偏振探测光学系统。
