航空发动机转子系统主动抑振控制方法研究
2019-03-22金福艺
金福艺,李 超
(长沙航空职业技术学院,湖南 长沙 410124)
旋转机械被广泛应用于包括航空发动机、燃气轮机、工业压缩机及各种电动机等机械装置中,在这些领域中,转子系统的振动问题一直是关注的焦点,振动过大不仅容易引发转子系统故障,同时也往往成为旋转机械其他系统振动的重要激励源[1]。因此,转子系统的振动问题不仅关系到转子系统自身的性能和安全,也关系到旋转机械整机的振动响应水平和工作性能。特别对于不断追求高可靠性、高性能的航空发动机来说,往往因为设计经验不足或者对系统结构的力学性能认识不够深刻,以及加工装配工艺水平的限制,使得仅通过优化力学特征参数以减少振动带来对结构损伤和对结构效率[2,3]减弱达不到期望的效果。
多电技术[4]在提高航空发动机性能、减少燃料消耗和改善维护性能等方面具有巨大优势,主动控制技术[5]是其核心技术中必不可少的一部分。通过主动控制,可以实现性能的多目标优化。多电、全电发动机技术正在起步,美国和欧盟等国家预计,多电航空发动机将在2020年左右投入使用。多电发动机是未来先进航空发动机的发展趋势,而探索转子系统的振动主动控制策略是其设计的重要内容。
对于航空发动机转子系统主动振动控制的研究是近代转子动力学新兴的领域,主要包括3个方面的内容:控制的性能函数,施加主动控制力的方法以及控制器的设计等。Glasgow等[6]对转子系统的模态控制做了较为详细的分析,但是由于陀螺力矩的作用,模态随转速变化,对于高转速的航空发动机转子来讲,很难达到快速跟踪、快速控制的目标。鲁棒控制又称为稳健性控制,可以有效的降低系统某些参数的敏感度,自1981年被Zames[7]提出后,获得迅速发展[8,9],并在转子动力学中得到了较好的应用[10,11]。刘雍等[12]首次将鲁棒控制应用于航空发动机转子系统的减振设计,所设计的H∞控制器不仅提高了系统对刚度参数变化的抗干扰能力,而且可以主动控制其周期扰动,但是由于控制目标和控制器的设计较为单一,对初始结构效率比较恶劣的转子结构系统,改善其综合性能依然较为困难。贺尔铭等[13]应用最优控制和极点配置方法,通过调节临界转速、阻尼比和不平衡量,实现了航空发动机转子的综合控制。上述不同的控制策略,均可实现对转子振动的主控控制,但是控制策略均比较单一。为了达到更好的抑振效果,本文综合前述研究经验,考虑航空发动机转子系统在初始结构设计较难满足结构效率要求的前提下,通过主动控制器的综合设计,实现多目标变量的有效控制,从而提高航空发动机整体力学性能,缩短研制周期,减少费用支出。
航空发动机转子系统主动振动控制的目的[14]主要有3个:首先,转子系统在工作转速邻域内应具有一定的裕度(工程上一般为20%),即需要合理的配置临界转速,减小转子的振动幅值,从而减小其变形所带来的气动效率损失。其次,转子系统对不平衡量的低敏感性。例如转子结构的平衡配重是在有限个转速下进行的,因此在飞行包线内仍存在一定的不平衡响应,这时应保证转子具有足够的抗变形能力。最后,转子系统在结构参数变化范围内应具有一定的稳健性。由于航空发动机转子系统大量存在止口、螺栓、端齿和套齿等连接结构,这会导致转子结构的非连续性,并且由于材料、加工、装配的差异,以及多变的工作状态,导致外部载荷的非确定性,这些因素均会使转子结构的质量/刚度在一定范围内发生变化。这时应在保证系统稳定的前提下,使受扰后的转子结构振动响应幅值尽快衰减。
综上,主动控制力u应包括三项,即u=u_1+u_2+u_3。其中,u_1用于临界转速的配置,保证工作转速下具有足够的裕度,采用状态反馈极点配置法;u_2用于控制系统的对不平衡响应的敏感性,采用最优控制方法;u_3用于在小扰动下,快速衰减瞬态响应,采用鲁棒控制方法。最终实现转子系统的控制综合,以期实现最优或次优控制。航空发动机转子系统施加主动控制力方法可以通过可控挤压油膜[15,16]、电磁轴承[17,18]、智能材料[19]等实现,相关文献有着较为详细的叙述,在此不做过多说明,仅做相关理论研究。
1 转子系统动力特性的状态空间表达
一般具有一定偏心质量的转子系统涡动微分方程具有如下形式:


若以调控转子系统的临界分布为目标,应使用u1控制。假设零初始状态,对式(2)左右进行拉氏变换,得到输出的拉氏变换y( s)为:

若以降低转子对不平衡响应的敏感度为目标,应使用u2控制。假设系统在不平衡力的作用下的响应为u0,扰动为ξ,则受扰后系统的响应为: u=u0+ξ,将其代入方程(1),可得扰动的运动状态微分方程:


此处u2的作用常常是使系统引入最佳阻尼,进而改变系统的阻尼阵,用于衰减不确定因素引起的瞬态振动。此时,系统的扰动由未受控时变为受控时的(这里ξ为初始扰动,0p为未受控时的特征值,pc为受控时的特征值)。由此可见,u2的引入主要是使受控系统得到所需的模态阻尼。
若以快速衰减瞬态响应为目标,可以使用u3控制。如图1所示,P( s)和C( s)为别为转子系统和控制器的传递函数,u3、e、d和y分别为外部输入、误差信号、外部扰动输入和控制对象输出(位移)的测量值。当d=0时,由外部输入u3到控制对象输出y的闭环传递函数为:

图1 闭环系统U3控制器示意
TS,现在把P( s)当做变化参数,计算T( s)对P( s)的变化灵敏度,当P( s)变化为 P( s) +ΔP( s)时,T( s)的变化ΔT( s)为:

进一步可得:

当式(6)中的 Δ P( s) → 0的极限,可求出T( s)对P( s)的变化的灵敏度函数S为

可以看出,式(6)在d=0时是闭环控制系统中由u3到e的传递函数,在u3=0时是由d到y的传递函数。也就是说,由式(7)描述的灵敏度函数S即描绘了u3对误差信号e的影响,又反映了外部干扰d对控制对象输出测量值y的影响。所谓降低系统对外部干扰的敏感性,即是将灵敏度函数的范数降到一个较低的值。
2 控制器设计
本文采用状态反馈极点配置、最优控制和鲁棒控制等现代控制综合的方法,分别实现对转子系统的临界裕度、不平衡量敏感性和瞬态衰减的主动控制。
2.1 u1控制器设计


基于此,引入任意n× n非奇异时常阵H,可将矩阵F取为:

步骤4:判断T的非奇异性。若T非奇异,进入下一步。若T奇异,返回步骤2,即重新选取,重复以上计算过程。
步骤5:计算 T-1,计算所求的状态反馈矩阵,计算完成。
2.2 u2控制器设计
线性系统的二次型最优控制器设计是现代控制理论最重要的成果之一,在工程上得到了广泛应用,其最重要的问题是需要选定合适的性能指标函数。性能指标函数一般具有如下形式:

式(8)包括终端指标和积分指标两部分。在航空发动机转子系统主控控制中,一般不考虑终端指标。这里不妨取频率的二次型指标作为性能指标函数,形式如下:


图2 最优反馈控制系统
其控制器的设计可以可归结为求解非线性黎卡提矩阵微分方程或代数方程。

式(10)是K( t)的矩阵微分方程。

K( t)与X( t)无关,所以可在运行前将R-1BTK( t )离线计算出来,并存储于计算机中。在系统运行时,将 -R-1BTK( t )从存储中取出,与同一时刻测量到的X( t)相乘,构成最优控制U( t)。所以系统运行时的计算量只含一个乘法计算,计算量很小。至于黎卡提矩阵方程的求解早已得到广泛深入的研究[20],有标准的计算机程序可供使用,求解规范方便。
2.3 u3控制器
控制系统鲁棒性分析的主要内容是控制分析系统在一组不确定性作用下的稳定性、稳态性能和动态性能,可归结为鲁棒稳定性分析和鲁棒性能分析这两个方面。在航空发动机转子结构设计中,鲁棒控制器的存在条件能够提供构型不确定性和外部干扰不确定性的范围,这便是鲁棒控制器的实际应用。
形如状态空间表达,若采用鲁棒H∞控制,可以写成如下的形式:

w为外部输入信号,u3是控制输入信号,Z是可控输出信号,Y是可观输出信号,要求(A , B2)能控,(C2,A )能观。对式进行拉氏变换,可得传递函数矩阵与状态方程之间的关系,即

由此可得干扰输入w到可控输出y之间的传递函数为:

H∞标准控制问题(如图3所示)之一就是通过设计控制器K( s)使闭环控制系统稳定且传递函数的无穷范数满足:


图3 H∞ 标准反馈控制系统

当然,在进行H∞控制器的设计时,首先应检查H∞控制器是否存在,否则因某些条件不满足,不能设计出所需的控制器。
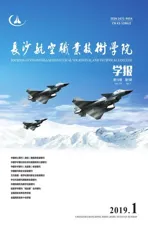
2.4 综合控制器
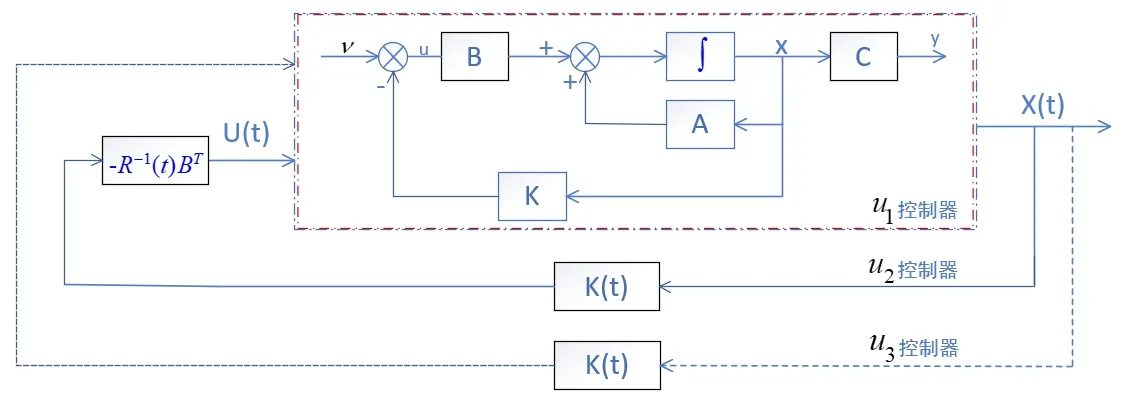
图4 综合控制器示意图
图4中的u1控制器K是静态的,与时间无关。因此可以在施加u1控制系统(图中红色虚线框内)的基础上选择施加u2控制器或u3控制器,具体需要施加u2(最优控制)还是u3(鲁棒控制)需要根据实际控制目标确定。
3 综合控制仿真分析
为了证明本文提出的综合反馈动态控制器的抑振效果,对转子-支承系统进行综合控制仿真分析。考虑到实际转子的复杂性和主动控制方法的通用性,采用如图5所示的航空发动机转子-支承系统简化模型[21],这里只给出转子变形在xoz面上的投影,yoz面与之相同。
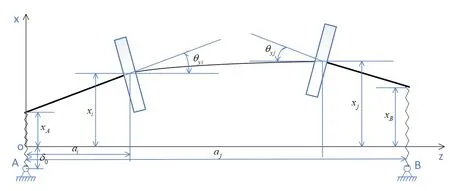
图5 转子变形在xoz平面上的投影
先分析转子圆盘与弹性支承的速度和位移,计算转子的动能和势能,进而采用Lagrange方程建立弹性支承偏置转子系统的稳态涡动微分方程。设xi、θyi,yi,θxi分别为第i个圆盘形心在oxz平面内和oyz平面内的绝对位移与转角,xA、xB和yA、yB分别为两端支承A和B在oxz平面内和oyz平面内的位移。忽略轴向变形与扭转变形的影响,稳态涡动时N个圆盘与两个弹性支承共有4N+4个自由度。选取广义坐标为

系统的动能T为支撑动能Tb与圆盘动能Td之和:

在xoz面的任意瞬时,根据两端弹性支承位移引起的第i个圆盘形心位移和截面转角与两端支承位移的几何关系为:



整个转轴的弹性势能应是oxz面内的弹性势能和oyz面内弹性势能的叠加:

两端弹性支承的动能:

转子系统的总动能:

设各圆盘的偏心距为 ei(i=1,2),根据广义力定义可得:

将动能和势能的表达式带入拉格朗日方程:

由此可以得到两端弹性支承单跨多盘转子系统的涡动微分方程:


所得到转子的坎贝尔图如图6、图7所示,当转子从0转速加速到14000 rpm时,将经过2阶临界转速(只考虑不平衡量激起的正进动),共振转速分别为3480 rpm,11847 rpm。
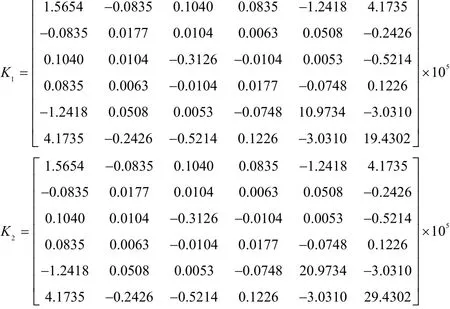
假如转子系统工作在11850 rpm附近,则可能会因为工作转速与共振频率之间的裕度过小而容易发生共振。假如规定需要将转子的2阶共振转速降到11000 rpm以下,则可以通过u1控制器实现。首先应通过线性变换提取原系统可控的部分,并考虑只能在轴承位置施加主动力,可设定常控制器为:


图6 坎贝尔图(控制前)

图7 坎贝尔图(控制后)
假设转子在盘1上存在不平衡量6g· mm,此时方程存在右端项:

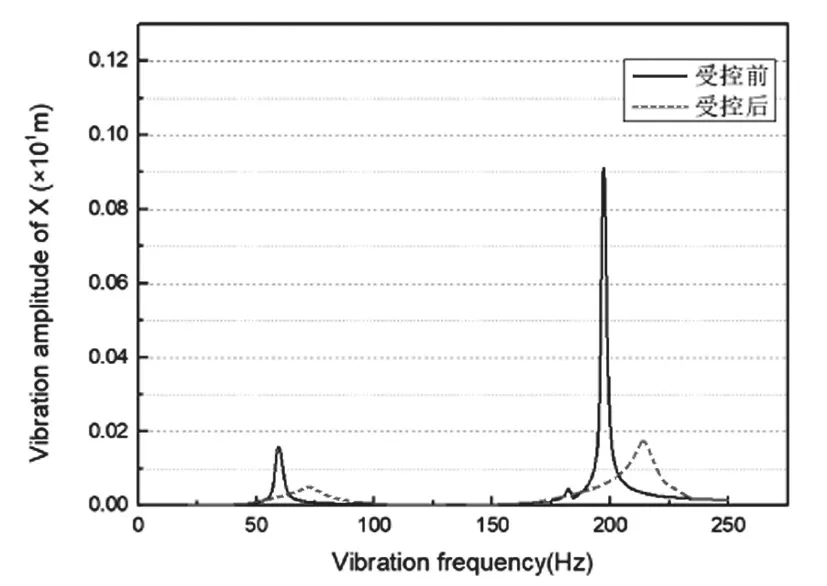
图8 X方向控制前后振幅
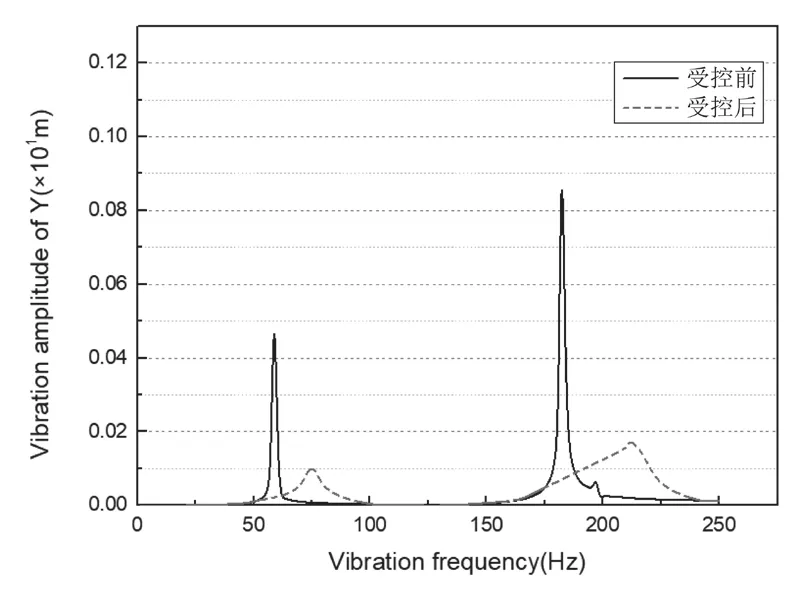
图9 Y方向控制前后振幅
由图8和图9可看出,施加主动控制力后的振动幅值(图中虚线)相比于转子的原始状态,不平衡力引起的振动幅值大幅度减小。
u3控制器的控制效果与u2类似,为节省篇幅,不再论述。值得说明的是,在实际应用中由于航空发动机转子结构复杂,难以写出具体表达式,这时可以采用商用有限元软件提取转子结构的质量、刚度等矩阵,并采用动态数值仿真,实现转子振动的主动控制。由于计算量很大,本文以简单转子为例,仅为说明航空发动机转子系统主动抑振技术的可行性。
4 结论
通过系统的极点配置可以有效的改变转子系统临界转速的分布。由于反馈矩阵为常矩阵,不受时间的影响,因此反馈后的控制系统可以作为一个优化的新系统,可以由优化系统的结构特征参数指导原结构的优化和改进,以期实现转子结构与力学特征的一体化设计,为航空发动机转子结构设计提供指导。当考虑转子结构系统因连接界面等非确定因素的影响时,实时追踪的反馈系统控制仍有待进一步探索。
通过航空发动机转子系统主动抑振综合控制,可以有效降低转子的不平衡响应,大幅提高转子系统的可靠性和安全性。同时,通过主动控制综合策略,可以在结构构型布局比较不合理的前提下进行相关力学特征的控制,从而整体提升其力学性能。
航空发动机转子系统主动控制综合策略仍有待需完善之处,如在控制过程中如何快速准确的跟踪到转子系统故障所引起的力学特征参数的变化,进而快速准确的选取响应的控制策略。