新型设计理念下的海角鲣鸟三栖无人机概念设计
2019-03-22吴燕萍
吴燕萍
(航空工业陕西飞机工业集团有限公司设计研究院,陕西 汉中 723213)
无人机是一种由动力驱动、无人驾驶,可一次或重复使用的航空器,它是一种会飞的机器人。无人机在军用、民用方面应用广泛。与有人驾驶飞机相比,无人机具有续航能力强、经济实用、无人员伤亡等独特优势。
1 无人机的发展需求
未来战争强调远距离无接触、高效性、低死亡率、低成本经济性,无人机发展必须适应未来战争作战体系的作战需要[1]。无人机涉及的任务领域能逐步覆盖所有有人驾驶飞机的任务领域,因此无人机有可能逐步代替有人驾驶飞机。
在过去漫长的岁月中无人机发展缓慢,直到近代几次局部地区战争中无人机才崭露头角,逐步成为除有人驾驶飞机和导弹以外的另一类空中作战武器。无人机直接用于作战始于美军入侵越南战争,后来又运用于中东、海湾、科索沃、阿富汗、伊拉克等几次局部地区战争。可以看出无人机具有战略、战役和战术侦察,监视战场,目标探测、战场毁伤评估、电子战、中继通信、边境巡逻、反恐等能力,为部队的作战行动提供情报,并可直接参加战斗,完成危险的、有人机无法完成的任务。
2 无人机的发展趋势
从国外研制的无人机发展状况,可以看出无人机呈现出以下发展趋势。
2.1 无人机体积、动力及适应性发展趋势
1)微小型、中型、大型化无人机井喷式发展。其中,微小型无人机是突出它灵巧性和隐身性,它能进入建筑物内部实施侦察,或在结构或设备上充当潜听哨和视频监视哨,用于侦察机和侦察卫星侦察不到的死角。中型无人机多为特种无人机,完成特定的任务,如巡逻、侦查、监视等。大型无人机是为了提高无人机的装载和作战能力,承担如运输、攻击作战等任务。
2)动力的发展
美国的核动力无人机“全球鹰”追求长航时,核动力用于无人机,使其滞空时间由以往的几十小时提高到数月。新型核动力无人机除执行侦察任务外,还可装备空地导弹,用于对地攻击。该核动力无人机采用的核动力与传统的裂变反应堆有所不同,它是由铪-178提供能量。
美国的“太阳神”无人机是电驱动,该机白天利用太阳能,晚上利用燃料电池工作,被人认为是高空、超长航时无人机的先锋,续航时间可达几周或几个月,不需要使用消耗性能源,不排放污染物。
英国“西风”无人机白天是利用太阳能,将其转化为电能,驱动电动机或螺旋桨,不同的是,晚上不是利用燃料电池系统作为动力,而是将白天的剩余电能存储在高效电池内,供晚上使用。
3)空中、陆地和水下适应性的发展
今天的无人机,除了天上飞的以外,已经发展到水里游的、陆上跑的,可以说无人机领域已无所不包、无所不在。一种无人机同时能在空中、陆地、水下不同的介质中生存,其隐身性、突击性、攻击性将在军事中发挥重要作用,它就是现实世界中的百变金刚,在未来高技术战争中,冲锋在第一线的不再是士兵们,而是在高空中盘旋、陆地水下伺机出击的无人机机群。
2.2 自主性与人工智能化发展
自主控制飞机滑行、起飞、自主导航到达观察区域。飞行过程中可以对任何威胁或意外事件作出反应。它可以想要的方式规划观察区域的航路、确定目标,利用传感器系统向操控者发送一系列图像和场景,以确定要打击的目标。一旦授权其这样做,它将自主的攻击目标,规划返航的航路,着陆并滑跑返回地。只需要输入“做什么”,而不需要给出复杂指令,控制无人机“如何做”。其核心是发展类似人大脑的神经网络或利用高速计算机算法模拟人脑的功能。
2.3 在军事体系中的发展趋势
无人机已经从原来的战争“配角”转换成“主角”,作战任务进一步拓展,从战术级向战役级和战略级方向延伸,从执行支援保障性任务向执行攻击性作战任务方向延伸,使无人机成为名副其实的杀伤性平台。无人机与无人机、无人机与有人机之间协同作战,进一步增强了作战能力,使无人机在军事体系中发挥了更大的作用。
“未来作战体系”中其核心部分是高科技机器人以及网络化的指挥与控制系统。高科技机器人包括无人机、无人战车、机器人士兵、无人水面水下航行器等[2]。无人智能作战总体和有人操作作战系统将构成一个庞大的作战集体,只是在战争进程中或某一层面的具体使用和分配上的不同。无人智能作战系统将承担最危险、最频繁、长时间、高强度的作战任务。
3 海角鲣鸟三栖无人机概念设计
基于无人机发展趋势及现状[3],笔者提出了一种新型三栖无人机“海角鲣鸟”的设计构想。该无人机可一次性或重复使用,也可采用空中投放、海中投放和起降式三种起飞投放方式。
3.1 需求分析
无人机空中、陆地和水下适应性发展是无人机的发展趋势之一,要求该种无人机具有三栖作战能力,充分要体现无人机的隐身性、闪电攻击性,它集无人机、无人战车、无人水下航行器于一身,在军事作战体系中具有非常重要的作用。
3.2 功能任务定位
该无人机可搭载不同任务系统,可具有三栖侦察,监视,目标探测、通信、反潜(舰)、攻击或自杀式攻击、反恐等能力,为部队的作战行动提供情报,并可直接攻击目标,完成危险、其它无人机及有人机无法完成的任务。
3.3 概念使用方式
空中使用。与其它无人机一致;
陆地使用。能在较平缓的道路行驶,有较好的机动性;
水中使用。该种无人机先在空中降低飞行高度,机翼收缩,减小升力,同时降低飞行速度,接近水面时,双立尾收缩,螺旋桨叶顺航向向后逐渐收角度,接触水面入水,入水后下沉,可在水面、水下航行。从水面起飞时,该种无人机先上浮到达水面,机翼和双立尾恢复到飞行状态,水面滑行起飞。
3.4 概念设计
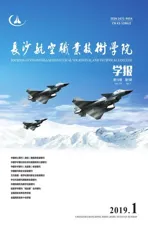
海角鲣鸟无人机机体主要包括机身、机翼、尾翼、发动机等部件。设计图所用单位均为mm。海角鲣鸟无人机概念设计三面图见图1,水下概念设计三面图见图2。从三面图及使用环境中可以看出:全机水密设计(见图3),保证使用环境要求。机体外形根据气动、流体力学设计,保证其空中、水下都具有较小的阻力外形,确保性能。机翼采用中单翼布局(见图4),尾翼采用V型立尾形式。机身外形等直段为圆形,最大直径为500 mm,前段与等值段光滑过渡,长细比为1.6。尾段外形与等值段光滑过渡,长细比为3.6,形成上翘式尾段,保证飞机擦地角度的要求。无人机整体采用正常式布局,外形一阶、二阶导数连续,外形光顺,阻力小。
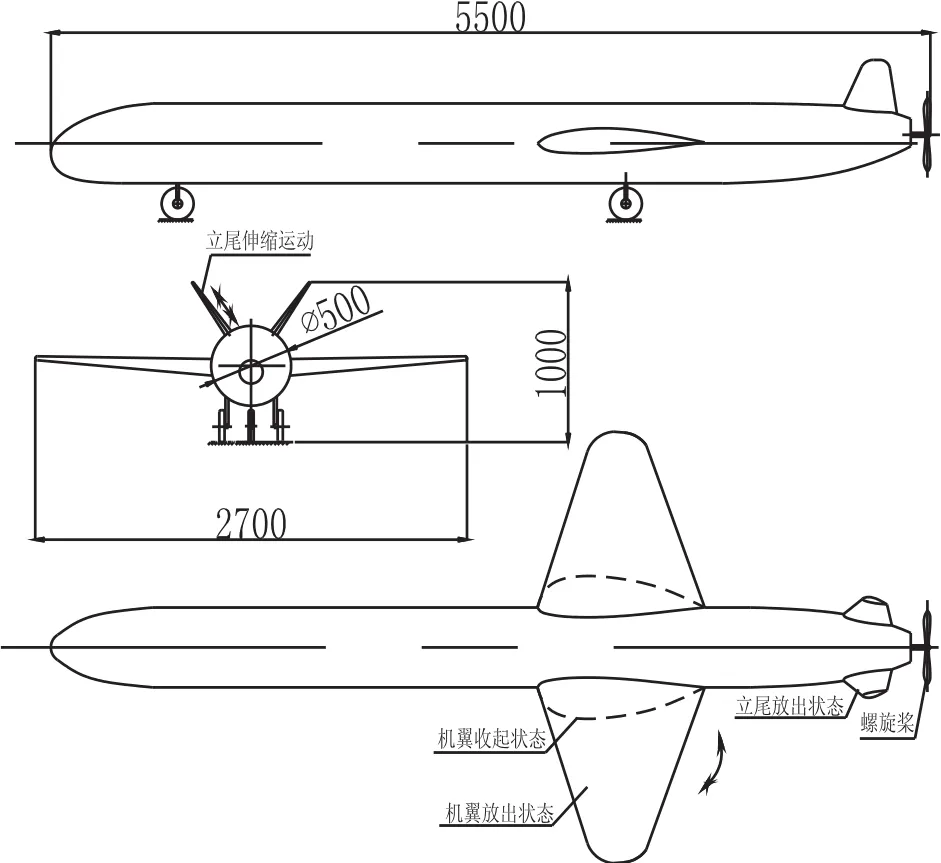
图1 空中海角鲣鸟无人机概念设计三面构想图
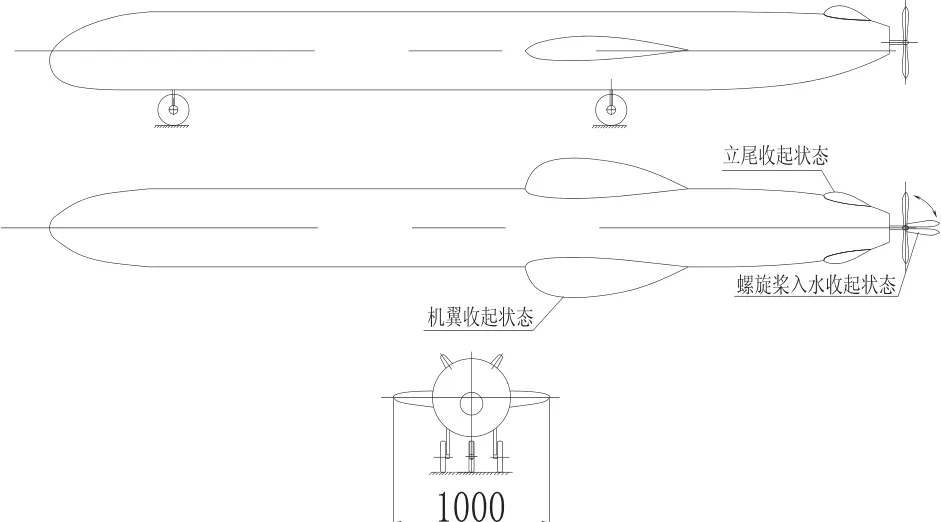
图2 水中海角鲣鸟无人机概念设计三面构想图
机身由26个整体框和若干长桁组成桁架式结构,结构材料采用金属+新材料,保证飞行、陆地、水下的强度刚度要求,见图5。机翼、双立尾设计成伸缩式收放,采用形状记忆合金智能材料,使机翼、双立尾结构设计成为智能全动结构,一层一层打开,一层一层收起,见图6。在水下工作时,机翼、立尾收起,形成一种类似于整流罩的形式,保证无人机外形相对光顺,阻力较小,就像鲣鸟的翅膀一样,收缩自如,上天可翱翔,入水可觅食。该无人机采用了前三点收放式起落架形式(一次性无起落架),前轮和主轮均采用向前收起形式。无人机机腹的任务舱有两个,第一个在两个起落架之间,第二个在主起落架之后,见图7。无人机结构要求简单、多路传力,力求重量较轻。
动力系统发动机布置在无人机尾部,全机动力源为全电系统或核动力装置,包括操纵系统、起落架等,来满足无人机的战术技术要求。
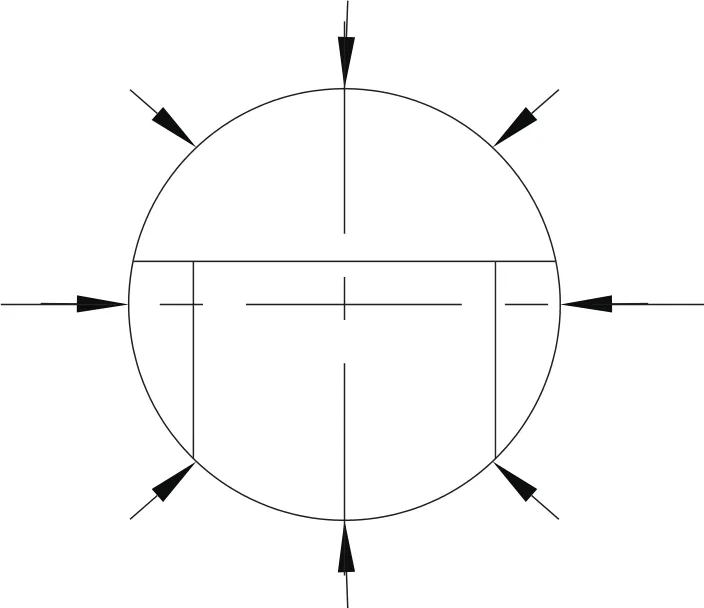
图3 海角鲣鸟无人机水密线图

图4 海角鲣鸟无人机机翼与机身布置连接图

图5 海角鲣鸟无人机概念设计框图
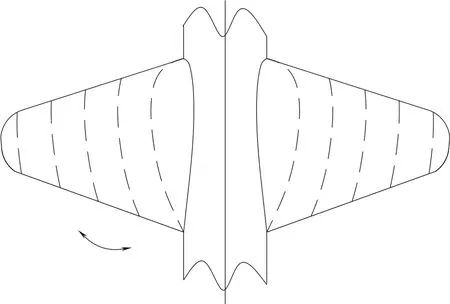
图6 海角鲣鸟无人机记忆合金材料机翼展开图
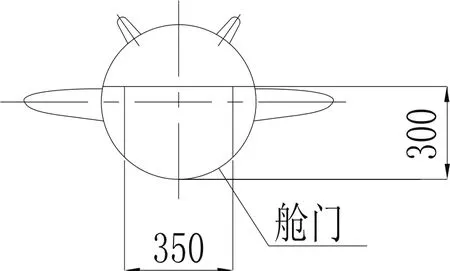
图7 海角鲣鸟无人机任务舱图
控制系统,采用自主性与人工智能化控制系统,只需要对无人机输入要完成的具体任务,而不需要控制无人机如何做。采用先进高速计算机算法模拟人脑的功能进行自主智能控制。
该无人机综合航电系统保证空/空、空/地、空/海(水下)间的语音和数据通信,完成自主导航、着陆、编队集结、无人机与无人机、无人机与有人机之间协同作战;信息识别和敌我识别等任务。水下采用惯性导航和声呐导航,水面之上采用惯性导航和卫星导航。
任务系统采用通用化、标准化、模块化、集成化设计,快速装卸,实行多功能的任务要求。
其基本数据如下(用CATIA工程软件初步估算):
机身长 约5.5 m
机高 约1 m
翼展 约2.7 m
直径 约0.5 m
空机重量 约700 kg
最大起飞重量 约1100 kg
最大飞行速度(空中) 约(500~800) km/h
航时(核动力空中水下) 约1 M
实用升限(空中) 约10000 m
最大航深 约400 m
最高航速(核动力) 约90 kn
海角鲣鸟无人机能在海陆空根据任务的要求,搭载不同的任务系统,可以完成空中、水面上、水面下通信、中继指挥、侦察搜索、监视、反潜(舰)、对敌攻击等任务。其特点是多功能、环境适应性强、突击性强、生存性强、隐身性强,成本低等。
4 结论
随着人工智能系统、传感技术、控制技术的快速发展,无人机将成为未来陆战、海战、空战、天战的“杀手锏”,海角鲣鸟作为一种三栖无人机,有望在未来的战争中发挥其独特的作用。