智能花草养护装置*
2019-03-22蒲飞杨倪振辉王喆凌征冬黄国波邹积祥
蒲飞杨,倪振辉,王喆,凌征冬,黄国波,邹积祥
智能花草养护装置*
蒲飞杨,倪振辉,王喆,凌征冬,黄国波,邹积祥
(武汉理工大学 机电工程学院,湖北 武汉 430070)
针对家庭花草智能养护,利用传感器的各项功能研发出一种可行性强、安全可靠、使用方便的装置,主要功能为家庭盆栽智能护理,当用户长时间外出、工作繁忙无时间打理时,对花草进行智能养护。通过传感器检测植物土壤温湿度、光照强度等,反馈回系统控制中心,做出判断后给予合理的操作,如自动浇水、提高温度和给予光照等。装置功能多样化,可自动控制植物对光照和水分的摄取,利用传感器进行反馈、自动调节、智能化控制,还有缺水自动检测保护和提醒的功能。
家庭花草;传感器检测;自动控制;智能养护
1 引言
随着社会的不断进步,人们的生活质量越来越高。在家里养盆栽可以陶冶情操,丰富生活,同时空气也会变得清新,因此养盆栽逐渐成为一种潮流。
盆栽水量是否适时适量、接收的光照是否能适时适量是养花成败的关键。因此,我们想通过设计一种集土壤湿度、空气温度、光照度监测、自动浇水、自动补光等功能于一体的智能花草养护装置,让家庭盆栽在人们无暇照顾时也能得到精心照料,同时此装置还可以通过用户手机APP远程查看盆栽生长情况并且实施远程控制。
2 装置功能简介
2.1 自动浇水功能
通过湿度传感器监测土壤湿度,利用传感器显示的数值与盆栽所需土壤湿度对比,小于所需数值则启动自动浇水设备,打开水管阀门,及时供应水分;当达到预先设置的湿度值时,自动关闭阀门,停止供水。此功能能够时刻让盆栽处于适宜的湿度,既不会因为浇水过多导致盆栽死亡,也不会因为缺水而干死。
2.2 自动补光、温度调节功能
通过光电式传感器及时感知外界光照强度,对盆栽做出一定的补光措施。系统内置一套补光系统,针对不同的植株,设定一定的光照强度值,通过调节灯光亮度以及补光时长来调控补充光照的多少。当外界光照不足时,进行补光,最终达到额定值时,关闭光源停止补光;当外界光照充足时,自动关闭光源,光照强度由系统控制。并且通过额定的光照强度,使之产热,可以使植株维持在一定的温度,让植株正常生长。
2.3 APP远程监控
装置外部装有一个摄像头,可以对盆栽进行摄像监控,并且及时将数据通过互联网上传到用户APP客户端。用户可以下载相匹配的APP软件,通过互联网,接收装置传过来的数据,即使身处异地,也可以实时看到盆栽的生长状况,如果用户需要,也可以通过手机APP远程控制装置,对盆栽进行浇水或者补光操作。
3 装置机械结构设计
运用SolidWorks三维建模软件,对本装置进行整体结构的大致设计,如图1所示。
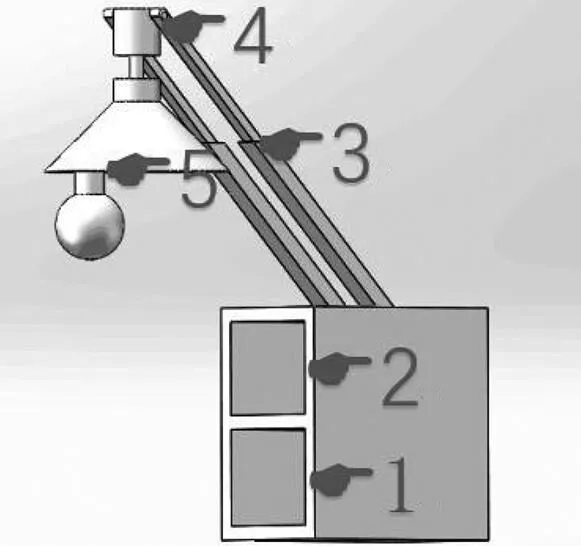
1—水槽;2—控制部分;3—伸缩杆结构;4—电机;5—补光灯具。
3.1 箱体整体结构设计
箱体整体结构尺寸为500 mm×300 mm×800 mm,数字1为水槽,由于水槽较重,为了降低装置重心,增加装置的稳定性,因此将水槽置于装置的最下部分,水槽可以取出,需要加水时,可以人工添加。水槽接出一根水管,插入盆栽土壤之中,通过系统自动控制阀门,来实现盆栽的自动供水;数字2为装置的控制部分,主要是来放置内部的电路板、电线等相关电子仪器,显示屏可以放置在2的正前面(未画出),方便用户进行操作,设置相应参数。为了防止水槽中的水溅到2中,引发装置发生短路,因此在1和2之间安装隔板,起到隔断的作用。
3.2 伸缩杆结构设计
如图1中数字3部分所示,伸缩杆为平行四边形式结构(也可用圆柱形),总长大约为1 m,由粗杆和细杆两部分组成,每部分长0.5 m左右。箱体2和伸缩杆3之间的连接部分可以使用棘轮机构,当需要将灯调高的时候,可以将伸缩杆往后拉,并且将伸缩杆拉长,由于棘轮的自动卡死功能,伸缩杆无法后退,需要后退的时候,可以按住棘轮的特定按钮,使棘轮倒回,并且配合伸缩杆的伸长缩短功能,可以完美地实现灯的高度调节功能。
3.3 电机和灯具结构
如图1中数字4和数字5所示,数字4部分为一小型电机,可以实现360°旋转功能,电机和灯具5通过连接轴连接。灯泡偏心安装在灯具的边缘部分,当电机转动的时候,带动灯泡进行360°旋转,对盆栽进行光照。之所以设计为偏心结构,是因为当灯泡旋转的时候,可以对盆栽各个角度进行充分光照,保证盆栽受光均匀,使其良好生长并且提高光合作用效率。
4 系统控制方案设计
系统总结构如图2所示。本系统由控制模块、传感器模块、通讯模块、灯光模块、浇水模块和显示器组成。传感器模块有土壤湿度传感器、空气温湿度传感器、光照强度传感器。土壤湿度传感器使用YL69模块,直接插入土壤中,检测得到电压(电流)信号并反馈到D/A转换模块,再将所得土壤湿度数值传输到控制模块;空气温湿度传感器使用DHT11模块,置于空气中,检测得到温湿度数值直接传回控制模块;光照强度传感器采用GY-30光照传感器,采用先进光电转换模块,将光照强度值转化为电压值,再将数据传送回控制模块。
灯光为植物生长灯,可根据植物需求变换不同波长的光照,灯泡位置固定,灯具可旋转,可以对植株进行360°照射;通讯模块由系统WiFi模块、手机端APP组成,WiFi模块无线连接手机后可传输盆栽各项信息数据以及系统工作状态,手机端设计控制界面,可远程控制浇花系统;浇水模块由继电器、水泵组成,可对土壤进行浇水;显示器可显示传感器反馈的数据。
控制模块是由单片机控制的系统,通过编程控制,对各个传感器反馈的信号进行分析比较,各项数据都设定一定数值范围,而且可以通过外部调整来进行相应操作。
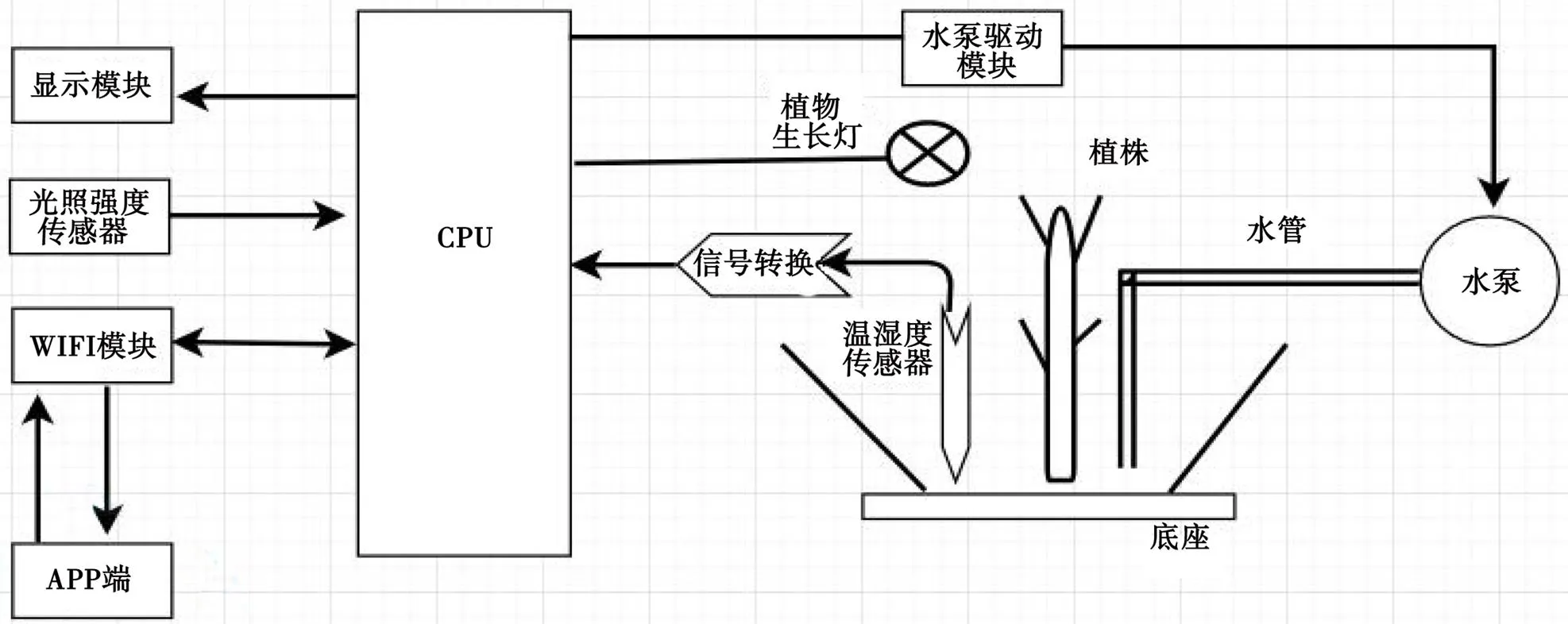
图2 系统总示意图
5 硬件模块设计
5.1 智能控制模块
智能控制利用传感器将采集到的数据转变为有用信号,传感器由敏感元件、转换元件以及相对应的电子电路共同构成,在使用过程中直接响应于被测物理量并且产生可用的信号。本系统温湿度传感器采用YL-69土壤湿度传感器,湿度测量范围为0.01~0.99 RH,分辨率为0.5 %RH,正常使用电压为3.3~5 V,获取湿度信息的方式有2种且可同时使用,分别是:①从传感器的D0引脚。土壤湿度大于某个阈值,则D0输出0,否则输出1(多用于湿度阀值控制开关)。②从传感器的A0引脚。土壤湿度越大,获取的模拟量值越大(多用于显示实时湿度值)。YL-69传感器检测到外界环境土壤湿度,先经过放大电路后,由A/D转化为数字信号送入单片机处理,与设定的湿度进行比较,然后命令执行机构采取相对应的措施,同时连接WiFi模块,向APP软件输送数据并接收其指令。
光照强度传感器选用GY-30数字光强度检测模块,光照强度检测范围0~65 535 Lux,正常工作电压3~5 V,传感器内置16 bitAD转换器,直接数字输出,接近于视觉灵敏度的分光特性,可对广泛的亮度进行1 Lux的高精度测定。针对不同的植株,设定一定的光照强度值,由引脚输出的电流信号经过驱动电路的放大,与设定值进行比较,通过控制继电器的启闭来控制LED植物生长灯的开关。当外界光照不足时,使之补光,最终达到额定值;当外界光照充足时,自动关闭光源,光照强度由系统控制。通过额定的光照强度,使之产热,可以使植物维持在一定的温度,让植物正常生长。
5.2 LED显示模块
输出显示部分采用常用的LCD1602液晶显示屏进行人机交互界面的显示控制,它具有体积小、超薄轻便、功耗低和显示内容丰富等优点。显示容量为16×2个字符,芯片工作电压为4.5~5.5 V,工作电流为2.0 mA/5.0V,模块最佳工作电压为5.0 V,字符尺寸为2.95 mm×4.35 mm(×)。管脚电源直接接在5 V电源上,方便1602的输入端直接与Arduino的I/O进行并行数据传送。
5.3 无线传送模块
WiFi模块与单片机系统连接在一起且WiFi模块工作在STA模式下,借助服务器和无线路由器的支持,将WiFi模块的MAC地址绑定在服务器中,这样整个互联网中服务器相当于一个路由器,智能终端只要在网络(2G/3G/4G/WiFi)的支持下,即可实现无线远程控制单片机引脚输出高电平或低电平,通过控制继电器的通断实现浇水和补光动作。
6 软件系统设计
为了使浇花系统中的各种硬件设备正常运行,对浇花过程进行实时测控和管理,还需要一套相应的软件系统来支持。软件系统包括定时程序、报警程序、监控程序及主程序。主程序的流程如图3所示。
利用安卓开发平台设计用以控制的APP,用安卓socket编程实现TCP/IP数据通信,将APP安装到移动端后,通过地址找到并连接到设备,从而实现通信。APP具有显示土壤温湿度的作用,这时,单片机将从传感器收集的温湿度信息通过串口通信方式传输给WiFi模块,WiFi模块通过无线通信将信息传到APP端,从而在APP上显示出来。
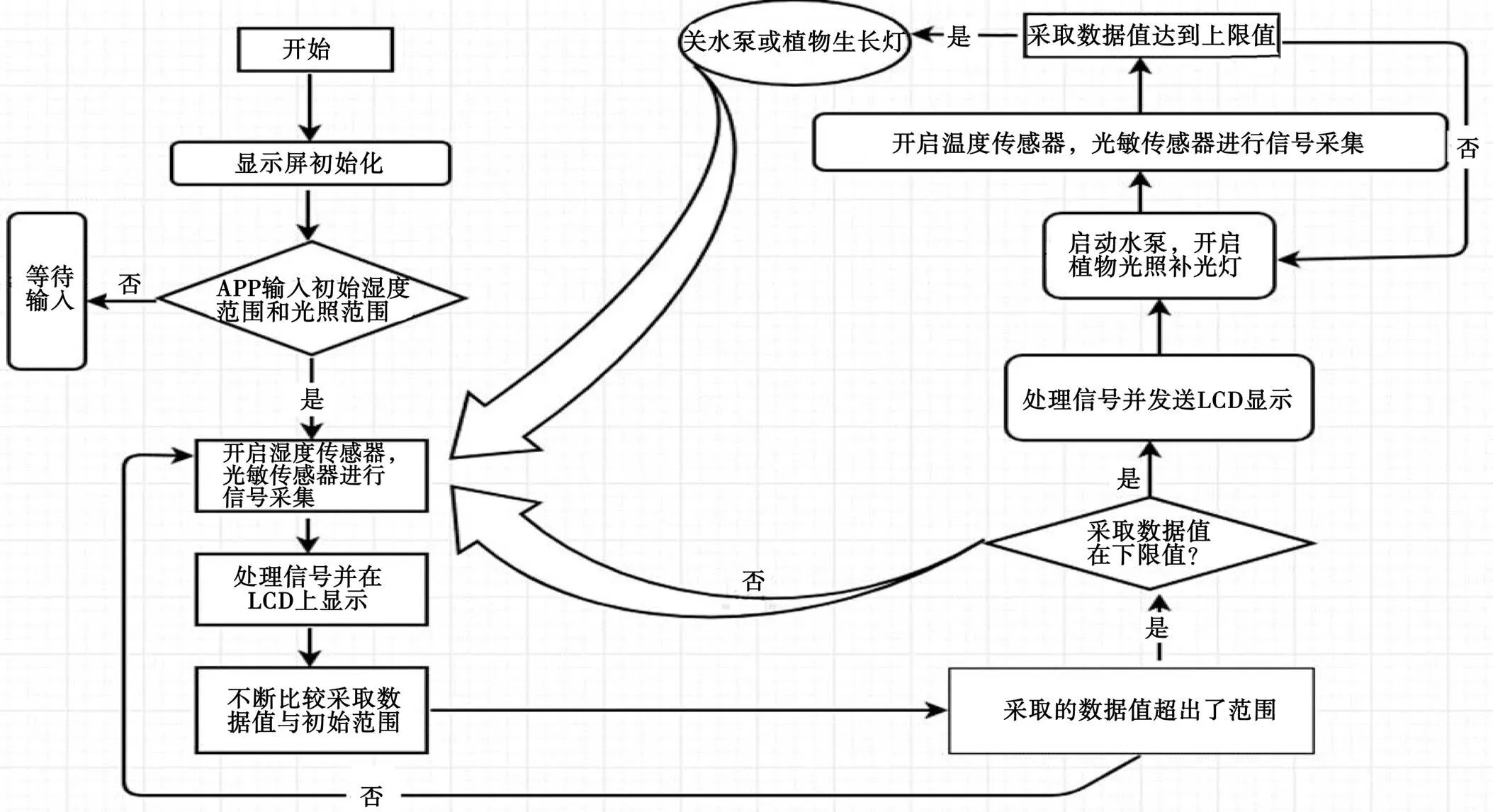
图3 系统软件流程图
连接后,可打开APP端温湿度、光照强度等信息页面,当在APP端有相应操作时,APP端会将控制量发送到WiFi模块,WiFi模块通过串口通信方式与单片机进行数据传送,从而使单片机I/O口输出不同的电平状态,并控制水泵的启停及植物生长灯的亮灭。
7 结语
本装置利用温湿度传感器对花草生长土壤的温湿度检测,实现24 h检测,且考虑到光照对花草的重要作用,本装置利用光学原理,采用先进的光电转换技术,由微电脑控制光学感应系统,能够感应及判断环境光线的亮度变化,自动控制补光灯的开启光闭。装置简单,成本低廉,相比于现有的浇花装置,此装置的功能更全面、强大,可适用于家庭、办公室等场所,适用性强,安全性高,所以应用前景广阔。
[1]王李冬,安康,徐玮,等.单片机与物联网技术[M].北京:机械工业出版社,2018.
[2]吴险峰.51单片机项目教程[M].北京:人民邮电出版社,2016.
[3]刘国柱,杜军威.Android程序设计与开发[M].北京:清华大学出版社,2017.
2095-6835(2019)05-0108-03
S68
A
10.15913/j.cnki.kjycx.2019.05.108
蒲飞杨(1997—),男,四川绵阳人,研究方向为机械工程。
倪振辉(1995—),男,河南周口人,研究方向为机械工程。
武汉理工大学自主创新研究基金项目(编号:2018-JD-B1-11)
〔编辑:严丽琴〕
