基于PCA的反辐射导弹激光引信目标识别方法
2019-03-19孔德浩苏益德
路 明,孔德浩,苏益德
(1.海军航空大学,山东 烟台 264001;2.中国人民解放军92916部队,海南 三亚 572000)
0 引言
现代战场中空舰反辐射导弹以及空地弹等都需要对引信系统配置激光引信,激光引信以其高精度、方向性好、抗电磁干扰等特点来提高精度,保证导弹毁伤效率[1]。激光引信的目标识别技术一直以来是一个重要的研究方向,现有的目标识别方法主要是通过检测距离或轮廓特征的突变来实现的[2],当背景信息复杂,难以将目标轮廓与背景特征有效区分开时则难以完成识别。本文针对此问题,选取典型舰船雷达作为识别目标,提出了基于PCA(主成分分析法)的空舰反辐射导弹激光引信目标识别方法。
1 典型舰船雷达目标特性
本文选取美国海军驱护舰代表“Arleigh Burke”级导弹驱逐舰上的雷达作为典型目标进行分析,该型舰主要搭载的雷达有SPY-1D相控阵雷达与SPG-62火控雷达。其中,相控阵雷达布设方式较为特殊,不具备通用适用特性,这里只对火控雷达进行建模并分析目标特性以便于后续激光引信的目标识别研究。
“Arleigh Burke”级导弹驱逐舰上布设有3部SPG-62火控雷达,其中1部位于前方舰岛平台距顶面高约3 m,另外2部位于后方上层建筑平台距顶面分别高约4 m和8 m[3]。如图1所示,利用CATIA软件建立的舰船三维模型中给出3部雷达在舰上的布设位置,其结构参数为2.5 m×2.5 m×4.5 m,天线形状为直径2 m的圆形。同样的,可以建立雷达模型如图2所示。
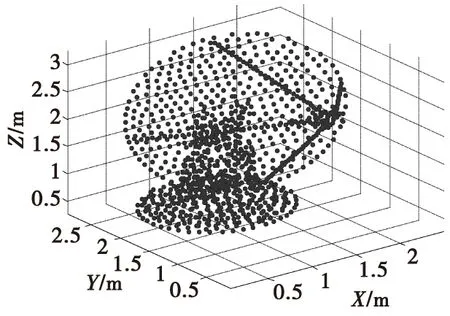
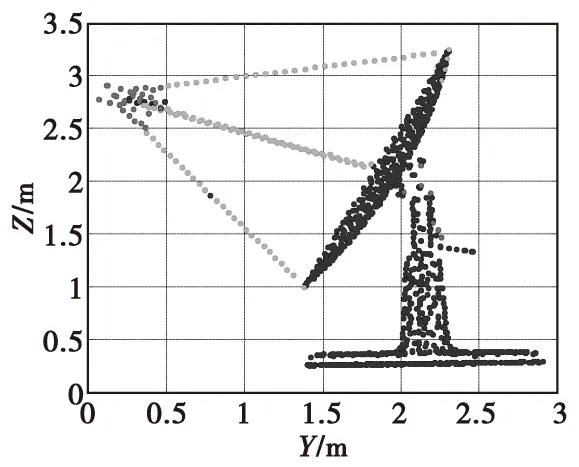
完成目标三维模型的建立后,再利用激光仿真软件获取雷达目标的激光点云数据,如图3所示。通过激光点云数据来模拟激光引信探测到目标后所获得的信息,从而进行后续的数据处理与分析。
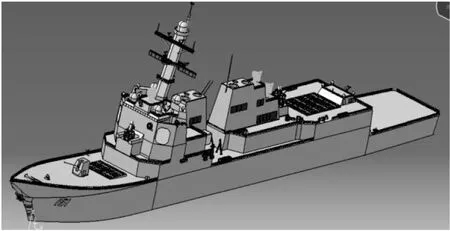
图1 舰船三维模型及雷达布设示意图Fig.1 Ship 3D model and radar layout
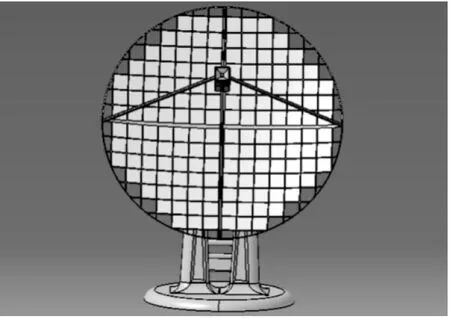
图2 SPG-62火控雷达三维模型示意图Fig.2 SPG-62 fire control radar 3D model schematic

图3 SPG-62火控雷达激光点云示意图Fig.3 SPG-62 fire control radar laser point cloud schematic
2 主成分分析法(PCA)
2.1 基本原理

PCA方法的实质就是求出这N个样本点的协方差矩阵CovX的特征向量ej,j=1,2,3与特征值λj,求取过程如下:
(1)
(2)
(3)
2.2 点的局部空间分布
根据所获得的目标点的局部空间分布特性可以把点云数据主要分为三类:杂散点、线状点和面状点[6]。不同目标其表面局部区域具有各自的特点,可以运用PCA对点进行分类,得到目标的点云特征从而实现激光引信的目标识别。
(4)
图4给出了点云数据在不同局部邻域空间特性下的分布示意图。
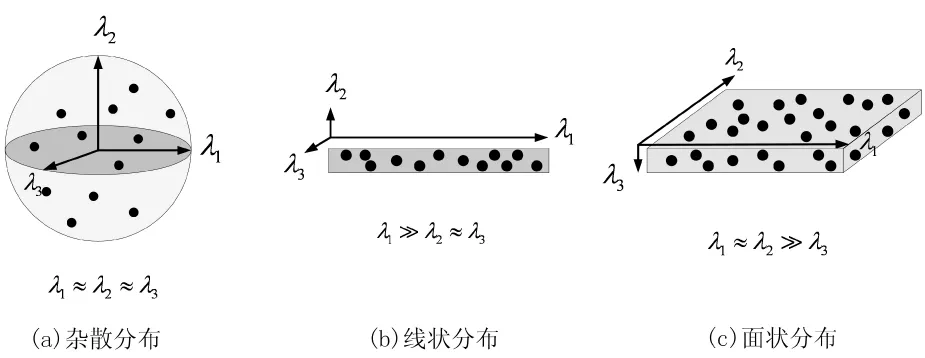
图4 点在不同局部邻域空间的分布示意图Fig.4 The distribution of points in different local neighborhood spaces
2.3 主分量贡献率
由上述分析可以得到目标点云空间分布特性与其局部邻域点云的协方差矩阵的特征值和特征向量的定性关系,但无法进行定量判断[8-9]。文献[10]中,采取了用主分量的贡献率来对不同局部邻域空间点云的分布特性进行了量化分析的方法。主分量贡献率指的是主分量所对应的特征值与所有特征值之和的比值,即:
(5)
式(5)中,ηj表示第j个主分量的贡献率,n表示特征值的数量,通常与数据维数相等。
结合式(4)与图4中不同分布特性与特征值的关系可分析得到,在点云局部邻域空间符合线状与面状分布时,其前两个主分量的贡献率之和远大于最小主分量的贡献率,即:
η1+η2≫η3
(6)
这里令“远大于”关系至少为10倍,又有
η1+η2+η3=1
(7)
则当η3≥0.09时,可分为杂散分布;当η3<0.09时则可为线状分布或面状分布,再根据式(4)-式(7)可得出:
(8)
当满足式(8)时,可分为线状分布;剩余的其他情况则可分为面状分布。
综合上述分析,可将式(4)改写为用主分量贡献率表示的定量式:
(9)
3 基于PCA的激光引信目标识别方法
3.1 激光引信探测原理
激光引信对目标进行探测时,激光器一方面对弹体飞行方向(沿弹轴方向)进行扫描探测,获得目标距离轮廓像其中一维的信息;另一方面沿与弹体飞行方向垂直的方向进行扫描探测,获得目标距离轮廓像的另一维信息;再通过测得引信与目标之间距离与引信探测倾角可计算获得目标的高度信息,从而一起构成目标的三维距离轮廓信息。
3.2 目标点云数据预处理
本文通过激光仿真软件将目标三维模型转换为点云数据,以此来模拟激光引信探测目标时所获取的数据信息。由于激光仿真软件得到的点云数据量很大,处理计算复杂,且与实际情况中激光引信所获取的部分目标信息不符。因此,需要对图3中所得到的雷达激光点云数据进行分割、筛选、去噪等方面的预处理,使得点云数据量减小,便于计算,同时减小点云分布不均匀所带来的影响。
3.3 点云数据网格化
假设经过预处理后的目标点云数据集为Pt,设单位网格尺寸为Rx×Ry×Rz,单位网格尺寸越小,点云的局部邻域空间分布分类分辨率越高,但是计算量越大。因此需要根据实际情况设定网格化的尺寸,将目标点云数据集划分为多个网格,通过研究单位网格内数据点的空间分布特性,从而得到目标整体点云的分布特性。设某一单位网格为Voi,j,k,该网格对应的三维空间为:
(10)
则位于Voi,j,k坐标范围内的x,y,z即为该网格内的数据点,表示为:
(11)
式(11)中,NVo表示该网格内的数据点个数,同一网格内的多个数据点可用同一空间分布特性表示。
3.4 数据计算及分类
目标点云数据经网格化分为若干个网格,分别计算各个网格内的数据点的协方差矩阵主分量。这里需设置一个网格内数据点数量的阈值Nthr,当网格内数据点数量小于Nthr,即NVo 在对各个网格内数据点进行数量判断与协方差矩阵及主分量计算后,根据式(5)计算网格内每个主分量的贡献率,进而根据式(9)对网格内数据点的空间分布特性进行分类判断,并对不同分布进行标记。 记录通过仿真软件所获得的雷达目标点云数据,将其经过PC分析后所得到的空间分布特性作为数据模板,计算模板数据中属于杂散分布、线状分布和面状分布的数据点分别占总数据点的比例。以此作为判定依据,可将激光引信实际探测得到的数据信息中各个分布的比例与模板数据进行匹配,从而完成初步的目标识别。 通过激光仿真软件可转换三维模型得到如图3所示的雷达目标点云数据,接着利用Matlab对点云数据进行预处理,从而减小数据点数量并使其均匀分布,便于后续计算与分析。经过预处理后的雷达目标点云数据如图5所示。 按照上述步骤对图5中预处理后得到的目标点云数据进行网格化,设置单位网格尺寸为Rx×Ry×Rz=0.2 m×0.2 m×0.2 m,取阈值Nthr=3,计算每个网格内数据的主分量贡献率并对结果进行空间分布特性的判断分类,从而得到如图6—图8所示目标点云局部空间分布特性的立体图、正视图与侧视图。 图5 预处理后的雷达目标点云数据图Fig.5 Radar target point cloud data map after preprocessing 图8 雷达目标点云局部空间分布特性侧视图Fig.8 Radar target point cloud local spatial distribution characteristics side view 观察上述结果图,可知大部分数据点能够实现局部空间分布特性的分类,尤其是雷达目标的现状部分十分明显,同时目标天线汇聚部分判断为杂散分布。目标主体部分符合面状分布特性,但仍有部分数据点出现误判以及呈现错误分类结果的情况,这是由于数据点数量较少造成的。 本文提出了基于PCA的空舰反辐射导弹激光引信目标识别方法。利用激光仿真软件将目标三维模型转换为激光点云数据并利用Matlab软件进行预处理,从而模拟激光引信所探测到的雷达目标信息。运用PCA对雷达目标点云数据进行网格化、主分量贡献率等计算分析,最终将目标数据点按照局部空间分布特性分为杂散分布、线状分布、面状分布三类。仿真结果表明,此方法得到的雷达目标点局部空间分布特性分类结果与目标实际情况大致相符,可将得到的雷达目标局部空间分布特性结果作为雷达目标模板与激光引信实际探测到的结果信息进行匹配识别,从而为反辐射导弹激光引信对雷达目标的识别提供了理论基础。3.5 数据信息匹配识别
4 仿真与分析
4.1 目标点云数据预处理仿真
4.2 目标空间分布特性仿真及分析
5 结论
