空轨结构的有限元模型合理性分析
2019-03-18,
,
(河北工程大学土木工程学院, 河北邯郸056038)
0 引言
空中轨道交通系统(简称空轨),是一种悬挂式单轨轨道交通形式。随着日益增加的城市地面交通压力,空轨的出现可以很好地解决这些问题。通常空轨结构的轨道梁被设计为向下开口箱型梁,为减少箱型梁的变形,箱型梁需要在跨度方向设置加劲肋。空轨结构柱可以是混凝土结构或者是钢结构,空轨的转向架在轨道梁内行驶,而车厢则悬挂于转向架的下方。
在德国和日本,该轨道系统的技术已较成熟,而在我国,空轨交通处在技术开发阶段。对于空轨的轨道梁优化设计[1-2]和车桥耦合振动分析[3-5],西南交通大学已做了大量工作。而对于空轨结构的抗震性能研究还很少。在空轨结构的动力分析中,由于精细模型的单元数量十分庞大,效率将会很低。为了保证精度的情况下同时提高效率,改用壳单元模拟、多尺度方法、子模型方法、子结构方法将是几种可选择的方法。近年来多尺度方法的合理性和有效性已被验证[6-10]。子模型方法可以通过提取整体模型的局部来细化网格以提高精度和简化计算[11],并且应用广泛[12-14]。子结构方法是通过缩减自由度来提高计算效率的,同时可以保证精度[15-17]。子结构方法对于包含大量重复构件的分析十分有效,在机械等领域应用较广。
为了同时实现精度和效率,轨道结构的模型选择合理性值得探讨。本文采用了实体单元建模、壳单元建模、多尺度方法、子模型方法及子结构方法通过ABAQUS软件建立有限元模型,模拟空轨结构在静力作用和动力作用下的受力状况。以实体模型作为精细模型,用其他模型与其对比,找出不同模型的差异性,选出最优的方案为空轨结构的有限元分析提供参考。
1 有限元模型建立
1.1 方案设计
本文参照文献[5]所提供的参数,建立两跨的空轨结构的几何模型,并通过ABAQUS有限元软件分析,模型如图1所示。空轨轨道梁的跨度设为30 m,加劲肋间距设置为1.5 m,在梁端设置加密。空轨结构柱的柱身为壁厚32 mm的空心圆柱,高14 m,采用T型形式。对比方案包括五种方法,分别为实体建模、壳单元建模、多尺度方法、子模型方法和子结构方法。通过对比这五种方法的结果,得出不同方案的优缺点,找出最优的数值模型。
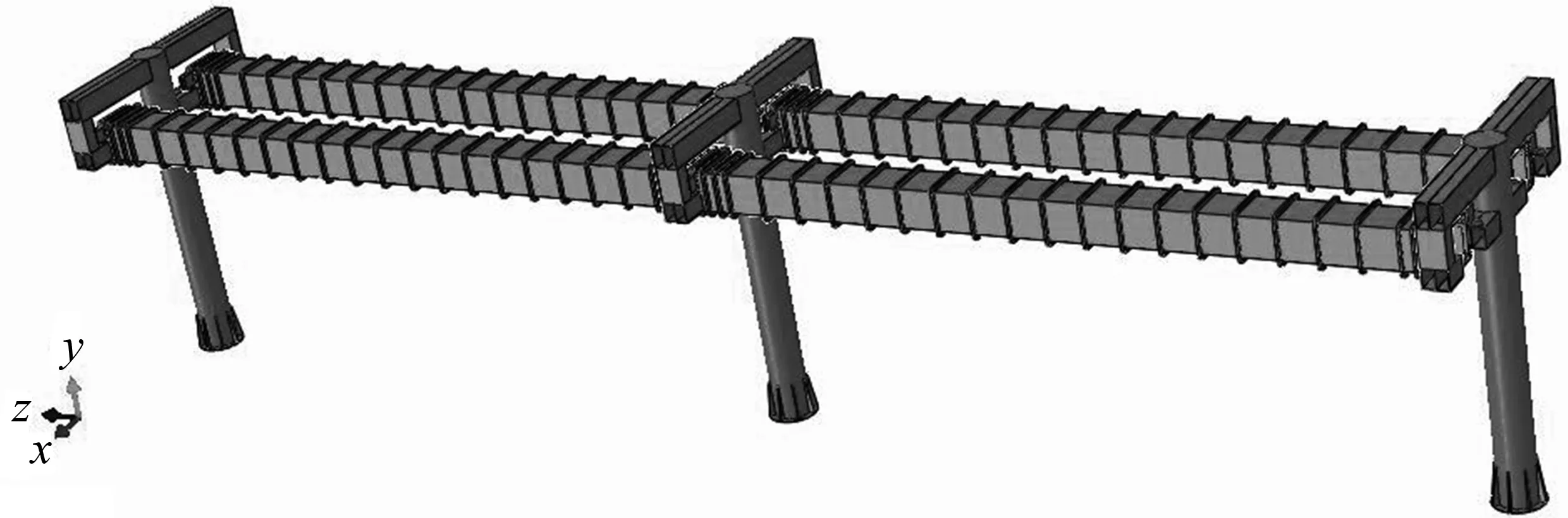
图1 空轨结构的有限元模型Fig.1 Finite element model of H-Bahn structure
1.2 工况分析
在静力分析中,本文根据轨道上是否有车辆行驶建立了两组工况,无车辆行驶的工况下只存在恒荷载,有车辆行驶的工况下包括恒荷载和活荷载。恒荷载主要包括空轨结构的自重荷载、轨道结构附加荷载。轨道结构附加荷载参照文献[5]和国外规范取3 kN/m。活荷载主要来自于列车荷载,只考虑走行轮的作用,忽略导向轮作用及其他荷载。将列车轴重乘以动力系数以考虑列车的动力效应。动力系数通过参照规范计算而得。列车轴重取为75 kN,以分布荷载形式作用在走行轮区域上。列车荷载最不利位置为列车行驶到轨道梁正中心。列车荷载分布如图2所示。本文将列车处在最不利位置产生的荷载作为活荷载。

图2 列车荷载分布(单位:mm)Fig.2 Train load distribution (Unit: mm)
在模态分析中采用Lanczos算法求解特征值,然后得出五种方法计算的前二十阶振型的频率。
在动力分析中只考虑空轨结构的自重,对动力荷载处理方式为在柱底施加地震波,地震波采用EI-Centro波的南北方向如图3所示,时间间隔为0.02 s,加速度幅值调整到620 cm/s2,取地震波前10秒沿顺桥向输入。阻尼采用瑞利阻尼,阻尼比ξ取为0.05。

图3 模型输入地震波Fig.3 Model input seismic waves
1.3 有限元模型
由于空轨结构较复杂,实体模型采用C3D10类型的二次四面体单元。单元网格尺寸大小为200 mm。多尺度模型采用实体单元和壳单元两种单元,建立原则基于节点复杂程度和受力大小。由于空轨轨道梁结构包含加劲肋,无法简单地采用梁单元代替。在梁柱连接处以及梁的跨中部位采取实体单元,其余均采用壳单元模拟。壳单元模型采用S4R类型壳单元。子模型方法中,首先建立网格较粗的空轨结构的整体模型进行分析,然后建立局部网格精细模型,将整体分析得到的结果作为局部精细模型的边界条件,本文采用的精细模型部位为轨道梁和结构柱。整体模型网格尺寸大小设置为400 mm,精细模型网格尺寸设置为200 mm。子结构方法是通过缩聚部分自由度,保留所需要的自由度,从而减小刚度矩阵计算量并提高效率。整个子结构刚度矩阵和荷载矩阵则可以用保留自由度的结点来表示。空轨结构模型可以用梁子结构和柱子结构拼装得到,这样只需要计算一个梁的刚度矩阵和一个柱的刚度矩阵,而不需要全部计算一遍,并且模型只保留了边界的自由度,自由度数量大大减小。
空轨结构有限元模型全部采用Q345D钢材,钢材采用本构关系为二折线形式的随动强化模型,强化段弹性模量为0.01E。材料参数如表1所示。

表1 钢材材料参数Tab.1 Steel material parameters
2 有限元分析结果
2.1 静力作用下的对比分析
通过ABAQUS进行静力分析得出五种方法中轨道梁在恒载作用下的弯矩、剪力、挠度图沿轨道梁位置分布如图4所示。由图可以看出,五种模型计算所得的剪力分布基本一致,剪力图中部分点有突起是由于这些点所在截面包含加劲肋。弯矩分布和挠度分布则存在差异,壳单元模型计算得出的结果最大,其他模型与实体模型比较接近。以实体模型结果为精确结果,弯矩、剪力、挠度的最大值误差对比如表2所示。由表可以看出,子结构模型结果最为接近,壳单元模型误差最大,说明壳单元模型的刚度比实体模型小,除壳单元模型的其他三种模型误差都不超过5 %。



图4 恒载下弯矩、剪力和挠度对比Fig.4 Comparison of internal force in dead load
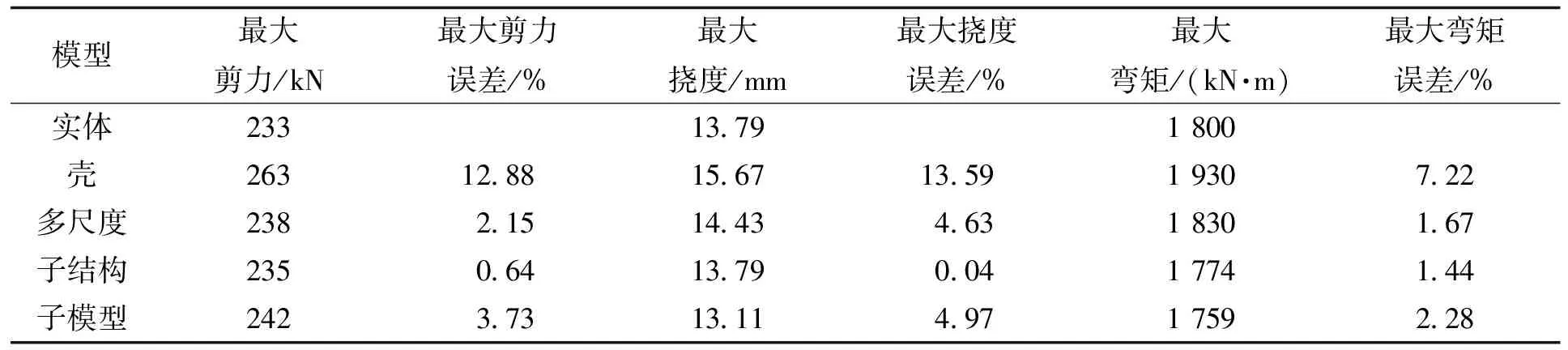
模型最大剪力/kN最大剪力误差/%最大挠度/mm最大挠度误差/%最大弯矩/(kN·m)最大弯矩误差/%实体23313.791 800壳26312.8815.6713.591 9307.22多尺度2382.1514.434.631 8301.67子结构2350.6413.790.041 7741.44子模型2423.7313.114.971 7592.28
五种方法中轨道梁在活载作用下的弯矩、剪力、挠度分布如图5所示。由图可以看出,由于列车荷载的存在,剪力分布不再是直线。弯矩、剪力、挠度的最大值误差对比如表3所示。由表可以看出,误差在恒载作用基础上进一步加大,壳单元误差依然最大,子结构模型和子模型模型误差相对最小。
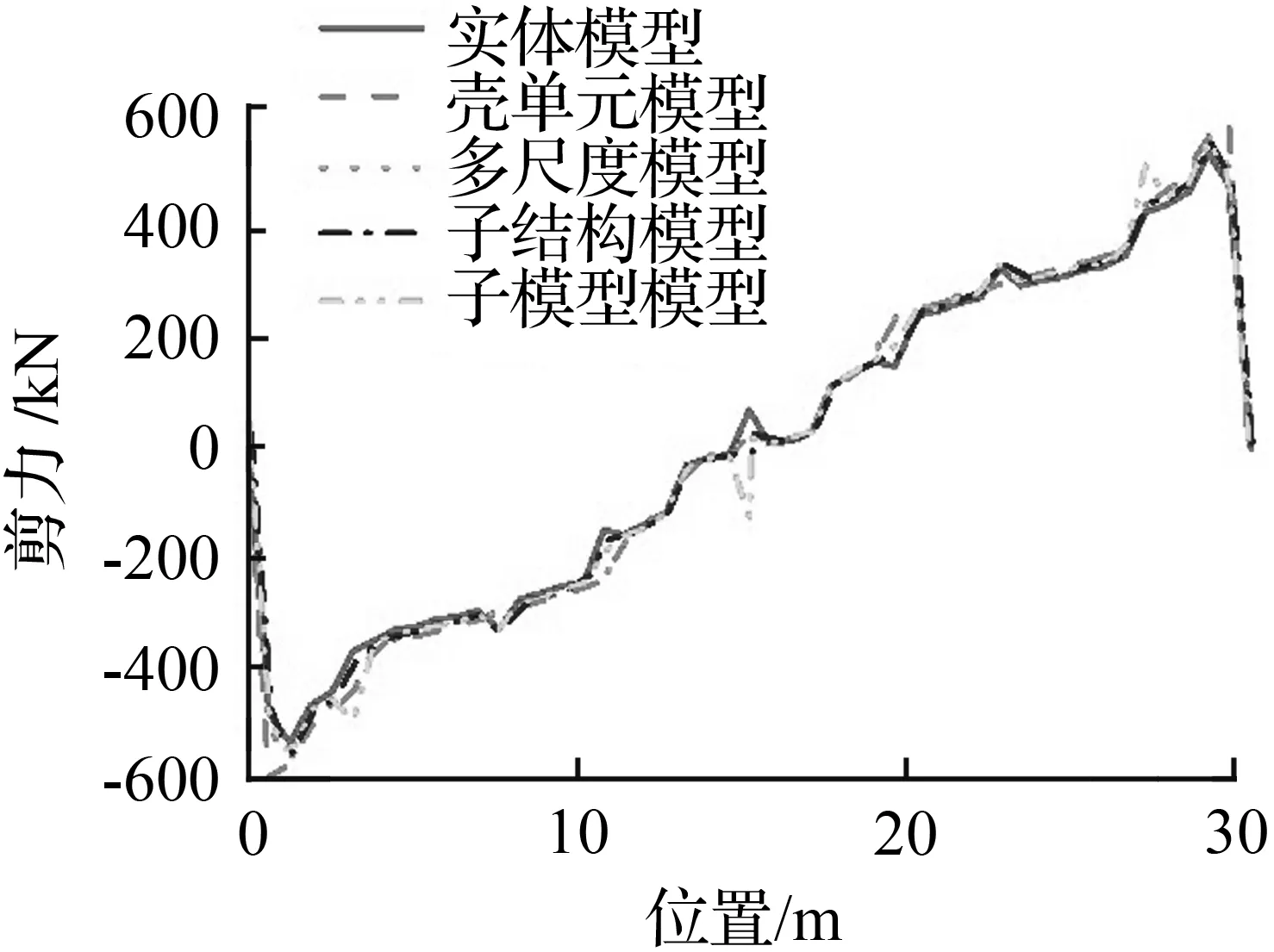


图5 活载下弯矩、剪力和挠度对比Fig.5 Comparison of internal force in live load
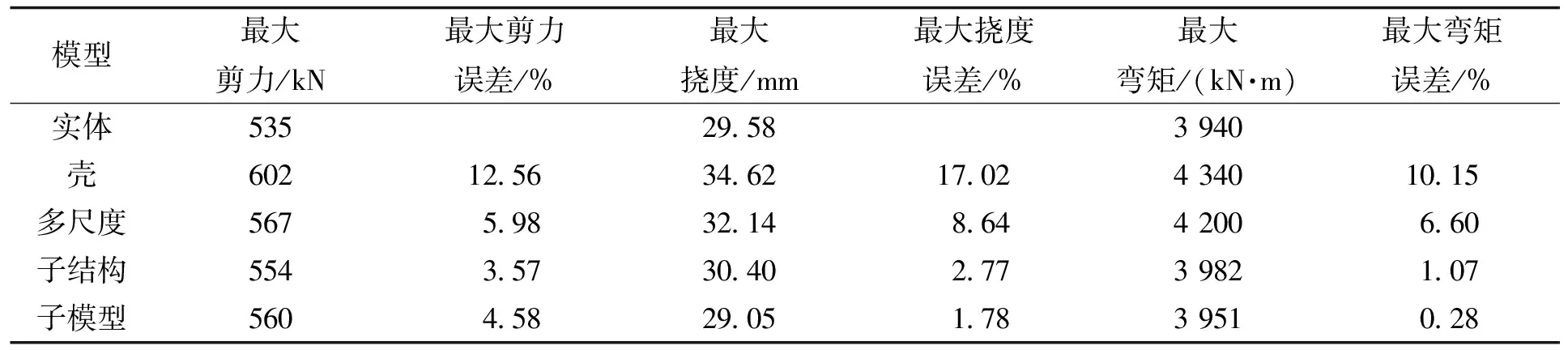
模型最大剪力/kN最大剪力误差/%最大挠度/mm最大挠度误差/%最大弯矩/(kN·m)最大弯矩误差/%实体53529.583 940壳60212.5634.6217.024 34010.15多尺度5675.9832.148.644 2006.60子结构5543.5730.402.773 9821.07子模型5604.5829.051.783 9510.28
2.2 模态对比分析

图6 模态对比Fig.6 Comparison of mode
通过ABAQUS进行模态分析,得出五种方法的前二十阶振型的频率对比如图6所示。由图可以看出,五组模型前三阶频率较吻合。前三阶振型中,第一阶和第三阶为横桥向弯曲,第二阶为顺桥向弯曲。从误差上来看,在第二阶振型中,壳单元模型、多尺度模型、子结构模型、子模型模型误差分别为11.13 %、5.55 %、2.74 %、1.62 %。壳单元误差最大,多尺度模型其次,子模型模型和子结构模型与实体模型接近。子模型模型的频率取自整体模型,与实体模型的区别仅为网格大小,说明网格大小也会影响振型的频率。由曲线可以看出,在10阶振型之后,壳单元模型的结果偏低,而多尺度模型居中,说明壳单元模型在高阶模态模拟中有较大误差,这主要是因为壳单元的边界约束相对于实体模型的边界约束较差,模型的整体刚度也较低造成的。从五阶振型以后,子结构模型的误差很大,说明由于内部节点的缩聚造成刚度偏大。但考虑到动力分析(地震或者车辆荷载)时,低阶模态起控制作用,高阶模态的结果失真是可以接受的。

图7 柱顶位移时程对比Fig.7 Comparison of the displacement intime-history analysis
2.3 地震作用下的对比分析
通过ABAQUS对三种模型进行时程分析,空轨结构的柱顶的位移曲线如图7所示。由图可以看出,前两秒位移曲线基本重合,之后壳单元模型的位移曲线较实体模型振幅放大明显,同样说明了壳单元模型的刚度较小。子结构模型的位移曲线最接近实体模型。峰值位移和误差如表4所示,由表可以看出,壳单元模型的误差最大,而子模型的误差最小,基本和实体模型一致。在动力计算中,由于壳单元刚度偏小,本模型选取的地震波的加速度峰值的最大值对应为9度罕遇地震,导致壳单元模型计算的误差很大。

表4 柱顶最大位移和误差对比Tab.4 Maximum displacement and error contrast of the capitals
地震作用下空轨结构的柱底的弯矩和剪力变化如图8所示,由图可以看出,前两秒五组模型计算所得的曲线基本重合,五组模型曲线趋势基本吻合。从中提取剪力和弯矩的峰值及误差如表5所示。从剪力和弯矩曲线峰值来看,子模型模型误差最小,其他模型误差在40 %左右。
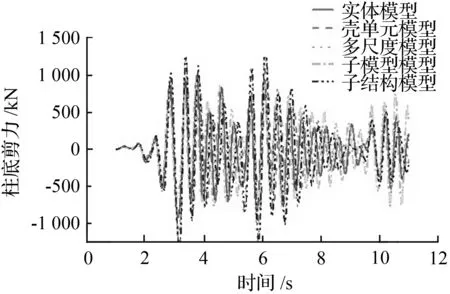
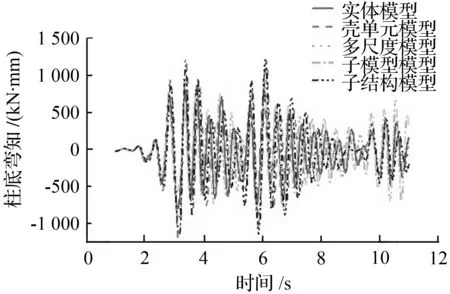
图8 柱底剪力和弯矩时程对比Fig.8 Contrast between the shear force and the moment

模型柱底最大剪力/kN柱底最大剪力误差/%柱底最大弯矩/(kN·m)柱底最大弯矩误差/%实体模型1 0058 472壳单元模型1 25825.1712 36045.89多尺度模型1 34233.5311 21032.32子结构模型1 46345.5712 31045.30子模型模型9109.397 9216.50
时程分析过程中梁端的弯矩和剪力变化如图9所示,由图可以看出,多尺度模型、子结构模型和实体模型基本吻合,而壳单元模型的剪力和弯矩曲线则波动很小,这说明壳单元模型刚度小。子模型模型的剪力和弯矩曲线则波动很大,这和子模型边界在梁端有关。根据圣维南原理,如果实际分布荷载被等效荷载代替,在荷载施加的位置应力和应变会有所改变,即边界处存在应力集中效应。梁端剪力和弯矩的峰值及误差如表6所示,从误差上来看,子模型模型误差最大,其他模型的误差基本在20 %以内。以上说明使用子模型方法提取靠近边界处的结果时会有很大误差。

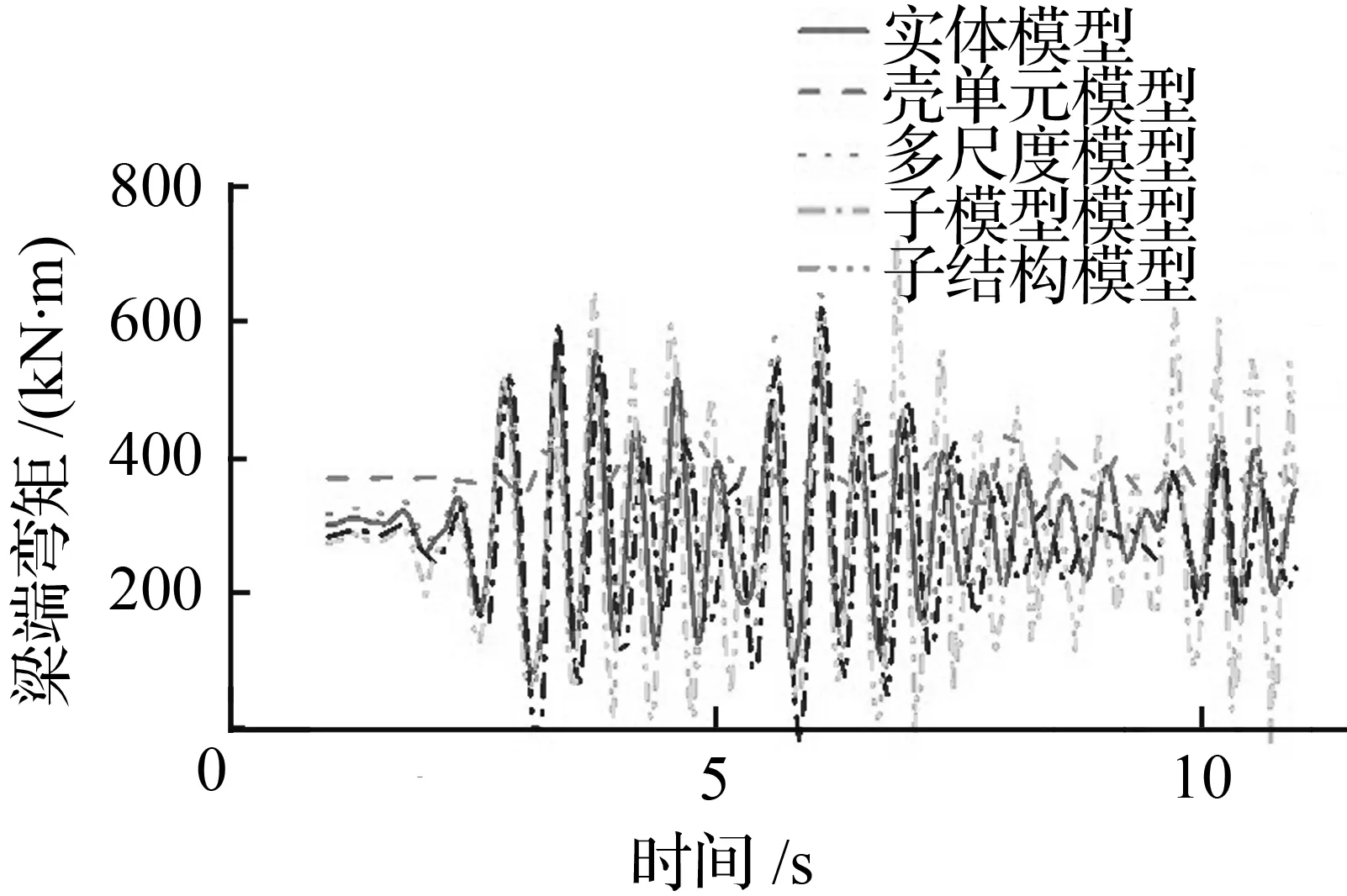
图9 梁端剪力和弯矩时程对比Fig.9 Shear and moment contrast ofbeam-ends

模型梁端最大剪力/kN梁端最大剪力误差/%梁端最大弯矩/(kN·m)梁端最大弯矩误差/%实体模型191556壳单元模型1900.7843821.16多尺度模型2015.2764215.42子模型模型21813.7272129.68子结构模型1973.1362913.18
时程分析过程中跨中挠度最大值及误差如表7所示,由表可以看出,壳单元的挠度最大。其他模型的挠度在11 mm左右,子结构模型、子模型模型和实体模型最为接近。从误差上来看,壳单元的误差最大,而子结构模型和子模型模型误差很小。

表7 梁跨中挠度和误差对比Tab.7 Deflection and error contrast of beam midspan
2.4 效率与资源占用对比
本文所使用的工作站配置以及计算效率和资源占用如表8和表9所示。由表可以看出,使用壳单元使用的时间最短,资源占用最少。在静力计算中,子结构模型用时最长,原因是需要计算子结构的刚度矩阵,而动力计算中子结构方法可以大幅度节省时间。其次,多尺度方法同样可以节省计算时间。子模型模型在静力计算中比实体模型用时较少。动力计算中,子模型模型计算时间包含整体模型计算时间和关注部位的模型的计算时间。本文中选取部位网格数量较多,结果用时比实体模型还要长。如果关注的部位较少,子模型在动力计算中也可以节省时间。

表8 工作站配置Tab.8 Workstation configuration

表9 计算时间与输出文件大小对比Tab.9 Comparison of calculation time and output file size
3 结语
本文通过精细建模方法、壳单元建模方法、多尺度方法、子模型方法和子结构方法对一段典型的空轨结构进行静力分析、模态分析、动力分析,以精细模型为精确解,与其他模型对比,现可得到以下结论:
① 从精度上来看,壳单元建模误差最大,子模型方法误差最小,而多尺度方法和子结构方法介于二者之间。
② 在动力计算中,子模型方法在靠近边界处的结果会差生很大误差,这是由于边界处应力集中造成的。
③ 从效率上来看,壳单元建模效率最高,子结构方法和多尺度方法也可以大幅度节省计算时间。如果关注部位较小,子模型方法可以节省时间,如果关注部位较大而且较多,反而会用时很长。
④ 综合来看,多尺度模型和子结构模型可以实现精度和效率的平衡,子模型方法则需要合理建模才能实现。