轨道角动量模式识别方法综述
2019-03-18冯文艳付栋之王云龙
冯文艳,付栋之,王云龙,张 沛
(西安交通大学 陕西省量子信息与光电量子器件重点实验室大学物理国家级实验教学示范中心,陕西 西安 710049)
光子除了具有自旋角动量外还具有轨道角动量. 1909年,在爱因斯坦的光量子理论[1]提出几年之后,Poynting发现了光子具有自旋角动量[2],然而,直到1992年光子的轨道角动量才被Allen等人发现,而且揭示了拉盖尔-高斯模式的角向指数l和光子的轨道角动量之间存在对应关系[3]. 光子的自旋角动量和偏振有关,若1束光是圆偏振光,则光束中每个光子都携带了σħ的自旋角动量. 由于电磁场的横波性,σ只能取±1,分别对应于左旋圆偏振和右旋圆偏振. 这2个态是量子力学中自旋算符的本征态, 因此光的自旋角动量态(偏振态)是二维量子态. 光子的轨道角动量和复电场相位有关,轨道角动量来源于绕传播方向的相位波前. 携带轨道角动量lħ的涡旋光束具有螺旋形等相位面,螺旋相位项为exp (ilφ),l为轨道角动量量子数,其正负代表旋转方向不同,φ是角坐标[3]. 由于波前是螺旋形等相位面,这会导致在传播轴上有相位奇点,即横向光强分布的中心是暗点. 由于l可以是任意整数,所以光子有无数个轨道角动量正交本征态,即光子轨道角动量具有高维特性.
光子轨道角动量的发现,除了让人们更进一步理解光的本质外,还拓展了光的应用范围,有着十分重要的科学意义和应用价值. 近年来, 科学家在量子信息的研究中发现高维量子态相比于二维量子态体现出更加特殊和优越的性质, 如在基础量子理论的验证方面,高维量子体系相比于二维量子体系更大程度地违背了贝尔不等式[4-5],这使得寻找高维量子态很有必要,而光子轨道角动量具有高维特性. 由于光子又是很好的量子系统和信息载体,近年来基于光子轨道角动量的高维量子态的研究,引起了人们的广泛兴趣[6-7]. 目前,由于光子轨道角动量的涡旋特性和高维特性,轨道角动量模式被应用在多个领域中,如光镊[8-9]、显微操作[10-11]、探测旋转微粒或旋转物体的角速度[12-13]、量子信息[14-15]、量子计算[16-19]、光通信[20-21]和量子密码学[22]等. 对光子轨道角动量的区分显得尤为重要,如在量子信息处理中,若利用光子轨道角动量进行编码信息,最后解码信息时,必然要求对光子轨道角动量进行识别. 目前已有多种探测轨道角动量模式的方法,本文针对目前在光学系统中已有的对轨道角动量模式识别的方法以分类的方式给予综述.
具有螺旋相位结构最常见的形式之一是拉盖尔-高斯模式. 拉盖尔-高斯模式是在傍轴近似条件下波动方程在柱坐标系下的解. 拉盖尔-高斯模式有2个指数,其中角向指数l与螺旋相位有关,径向指数p与拉盖尔多项式控制的振幅变化有关. 角向指数l也被称为轨道角动量量子数或轨道角动量拓扑荷,携带轨道角动量的光束也被称为涡旋光束. 本文以拉盖尔-高斯模式为例来阐述识别轨道角动量模式的方法.
1 干涉仪法
Padgett等人提出利用两臂加入Dove棱镜的 Mach-Zehnder干涉仪来测量拉盖尔-高斯模式的轨道角动量量子数l[23]. 其中一臂的Dove棱镜是旋转的,另一臂的Dove 棱镜是静止的,如图1所示. SPP为螺旋相位板;HWP为半波片;PBS为偏振分束器;M为反射镜. 当Dove棱镜沿长轴方向旋转α/2时,经过Dove棱镜的光束将被旋转α. 当携带轨道角动量lħ的拉盖尔-高斯光束经过图1中的Mach-Zehnder干涉仪时,两臂间将产生Δφ=lα的相位差,当旋转的Dove棱镜旋转1周时,在探测端口将产生明暗交替变化的干涉图样. 在入射不同拉盖尔-高斯模式的情况下,干涉图样的光强随旋转角α的变化如图2所示,α/2表示Dove棱镜的旋转角,α表示拉盖尔-高斯光束的旋转角. 干涉图样光强变化的周期等于入射的拉盖尔-高斯光束的轨道角动量量子数l的大小,因此,通过测量干涉图样光强的变化周期就可以得到入射的拉盖尔-高斯模式的轨道角动量量子数l.
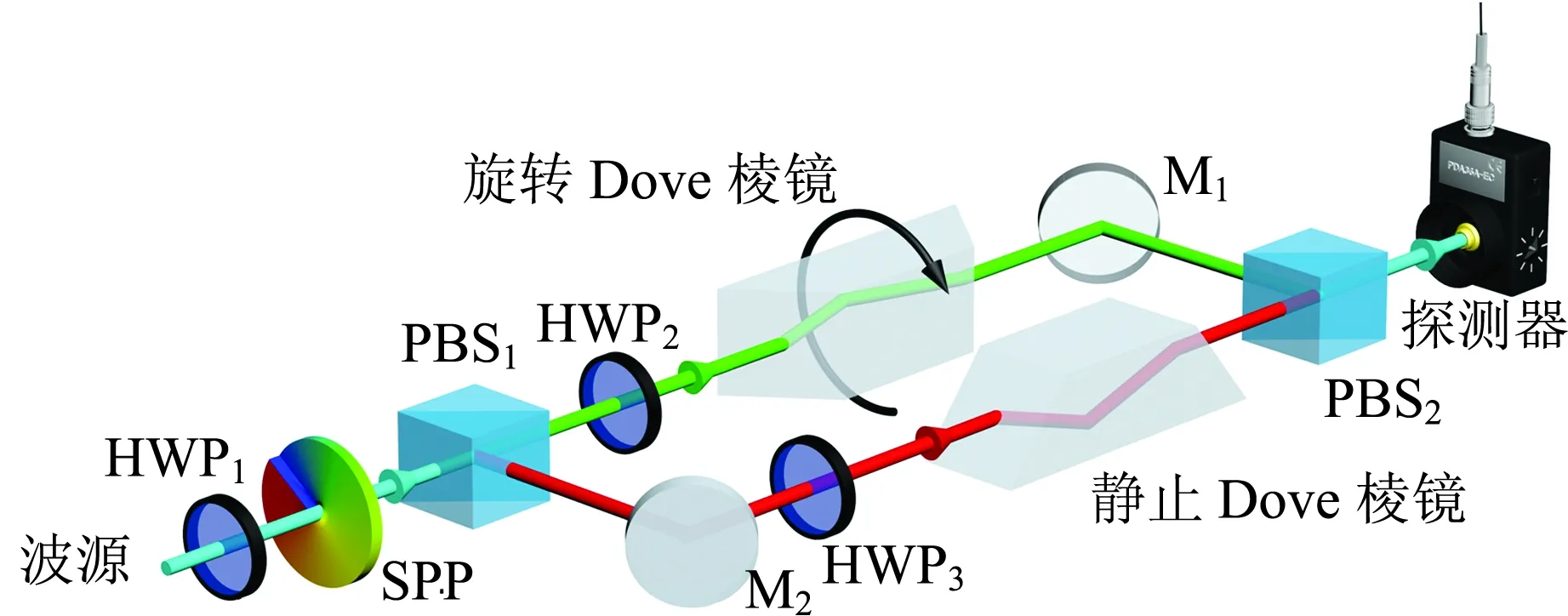
图1 两臂插有Dove棱镜的Mach-Zehnder干涉仪
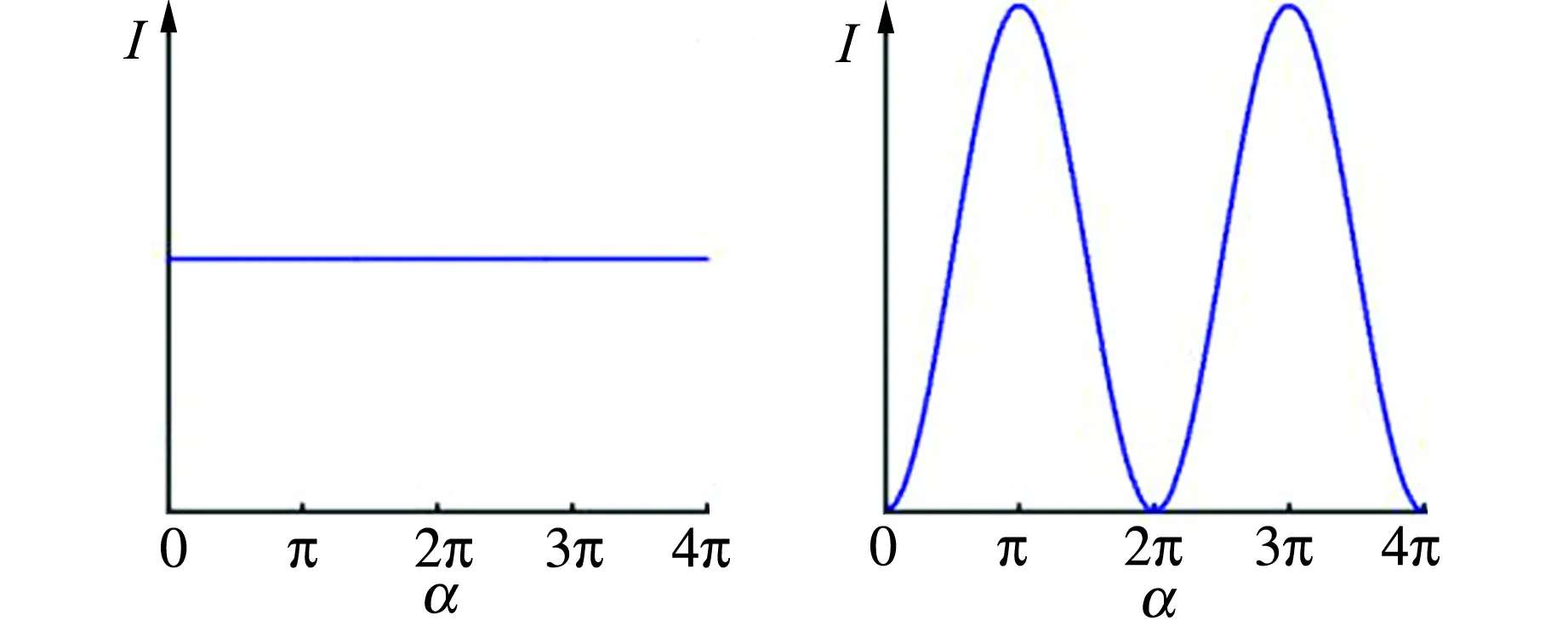
(a)l=0 (b)l=1
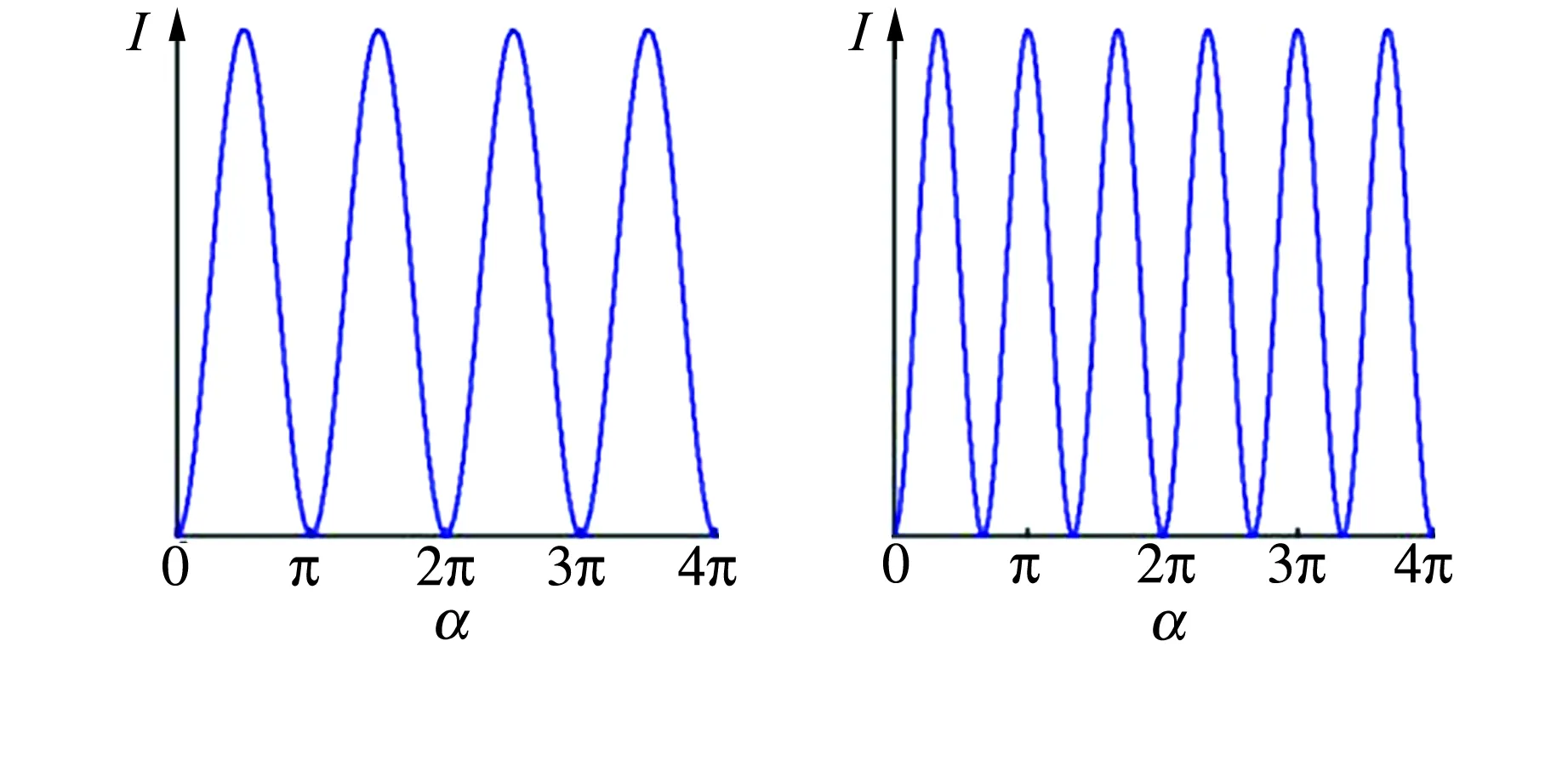
(c)l=2 (d)l=3图2 携带不同轨道角动量的拉盖尔-高斯模式入射Mach-Zehnder干涉仪得到的干涉图样的光强随旋转角α的变化
2002年,Leach等人提出基于Mach-Zehnder干涉仪在单光子水平下有效区分不同轨道角动量模式的方法[24]. 如图3所示(图中BS为分束器; DP为Dove棱镜),在 Mach-Zehnder干涉仪一臂中插入无旋转的 Dove棱镜,另一臂中插入旋转角度为α/2的 Dove 棱镜,这将会在通过两臂的涡旋光束中引起依赖于轨道角动量量子数l的相位差Δφ=lα. 对于l和α特定的组合,不同的拉盖尔-高斯模式将会在不同的端口出现干涉相长或干涉相消. 例如,当α=π时,即其中一臂的Dove棱镜被旋转α/2=π/2时,奇数和偶数l将分别被分离在端口A1和B1. 理论上,N个轨道角动量模式可以通过级联N-1个 Mach-Zehnder干涉仪进行分离,在每一级中旋转的Dove棱镜的旋转角度不同,原理图如图4所示. 此方法可以在单光子水平下探测轨道角动量模式,但是,对于测量多个轨道角动量模式,需要级联多个Mach-Zehnder干涉仪,这对目前现有的技术来说是很大的挑战.
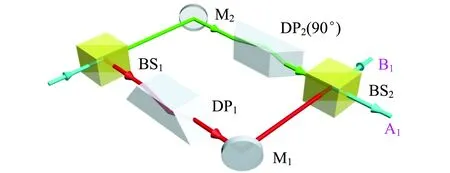
图3 两臂中插入Dove棱镜的Mach-Zehnder干涉仪
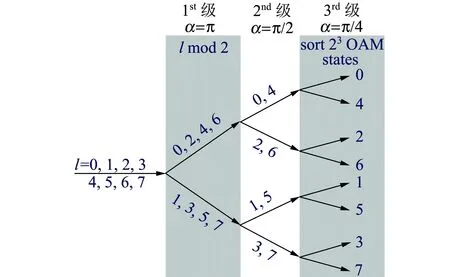
图4 级联3级干涉仪分离8个轨道角动量模式的原理图(从l=0到l=7,第1级、第2级和第3级光束旋转的角度分别为π,π/2和π/4)
除此之外,还有许多基于干涉仪识别轨道角动量模式的方法[25-29],如利用稳定性较好的Sagnac干涉仪代替Mach-Zehnder干涉仪来区分轨道角动量模式[27,29]、利用Mach-Zehnder干涉仪或Sagnac 干涉仪将轨道角动量和偏振耦合起来的方法探测轨道角动量模式[28-29].
2 镜像干涉
通过观察轨道角动量模式与其镜像模式(携带的轨道角动量大小相等,正负相反)的干涉图样可以探测轨道角动量模式[30-32]. 众所周知,如果携带轨道角动量为lħ的涡旋光束被镜子反射之后,其旋转方向反转,即轨道角动量变为-lħ. 现在考虑2个具有相反螺旋性的轨道角动量光束沿与z轴成角度α和-α的方向传播,如图5所示(红色和蓝色实线分别表示轨道角动量量子数为l和-l的涡旋光束的波矢量. 红色虚线和蓝色虚线分别表示轨道角动量量子数为l和-l的涡旋光束的波前). 入射的轨道角动量光束和它的镜像模式光束的电场表达式为
El=u0exp [iφ1(x)]exp (ilφ),
E-l=u0exp [iφ2(x)]exp (-ilφ),
(1)
其中u0是轨道角动量光束的振幅. 由图5可知,在z=0的平面上,
φ1(x)=kxcosα+φ10=kxx+φ10,
φ2(x)=kxcos (π-α)+φ20=-kxx+φ20,
(2)
其中φ10(x)和φ20(x)分别是入射的轨道角动量光束和其镜像模式光束在坐标原点O的初始相位. 从而得到2束光干涉图样的强度分布为
I=|El+E-l|2=2I0[1+cos (2lφ-2kxx+Δφ0)].
(3)
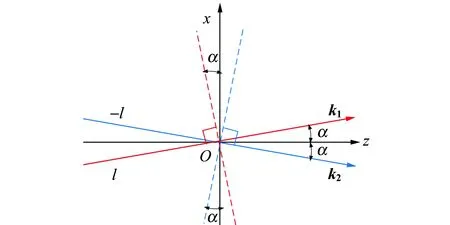
图5 轨道角动量模式与其镜像模式干涉原理图
其中I0是入射的轨道角动量光束或其镜像模式光束的光强,Δφ0=φ10-φ20是入射的轨道角动量光束与其镜像模式光束的初始相位差. 从式(3)可以看出,干涉图样的强度分布类似于中心有2l个错位条纹的振幅全息图,因此,可以根据干涉图样中条纹错位的个数来确定入射的轨道角动量模式. 如图6所示,因为入射的2个轨道角动量光束的波前具有相反的螺旋性,且沿与z轴角度α的方向传播,因此,干涉图样的下半部分的条纹相对于上半部分额外多了2l个.
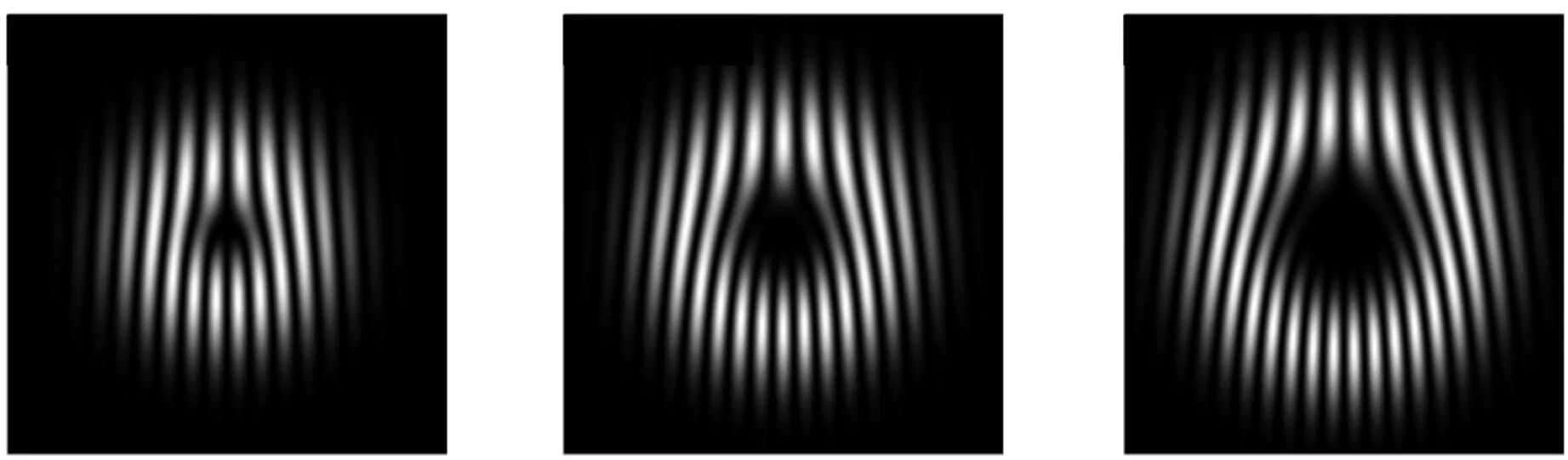
(a)l=1 (b)l=2 (c)l=3图6 轨道角动量量子数为1,2,3的涡旋光束与其镜像模式干涉图样(干涉图样底部分别有2条、4条、6条额外的条纹)
当然,如果轨道角动量光束与其镜像模式进行同轴干涉,即α=0,则它们的干涉图样类似于2个具有相反符号的轨道角动量光束的叠加的结果,即干涉图样中含有2l个花瓣,如图7所示. 由于l和-l互为镜像,因此,此方法只能探测涡旋光束的轨道角动量量子数l的大小,无法探测其正负.

(a)l=1 (b)l=2 (c)l=3图7 轨道角动量量子数为1,2,3的涡旋光束与其镜像模式同轴干涉图样(干涉图样分别有2,4,6个花瓣)
3 平面波干涉
1束涡旋光和1束平面波干涉,由于涡旋光束的螺旋相位结构exp (ilφ),干涉图样是l条螺旋形条纹,因此,可以通过干涉图样中的螺旋条纹的个数有效地识别轨道角动量模式[32-34]. 平面波与轨道角动量模式的电场可分别表达为
E0=u0(r)exp [iφ1(r)],
El=ul(r)exp [iφ2(r)]exp (ilφ).
(4)
其中u0和ul分别是平面波和涡旋光束的振幅. 涡旋光束和平面波之间的同轴干涉可以用Mach-Zehnder干涉仪来实现,如图8所示,在 Mach-Zehnder干涉仪其中一臂用螺旋相位板(SPP)产生待测的携带轨道角动量的涡旋光束,另一臂中加入扩束器用来产生平面波. 当涡旋光束和平面波进行同轴干涉时,将会得到带有螺旋条纹的干涉图样. 在z=0平面上干涉图样的光强分布为
I= |E0+El|2=
|u0|2+|ul|2+2|u0||ul|cos (Δφ),
(5)
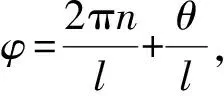
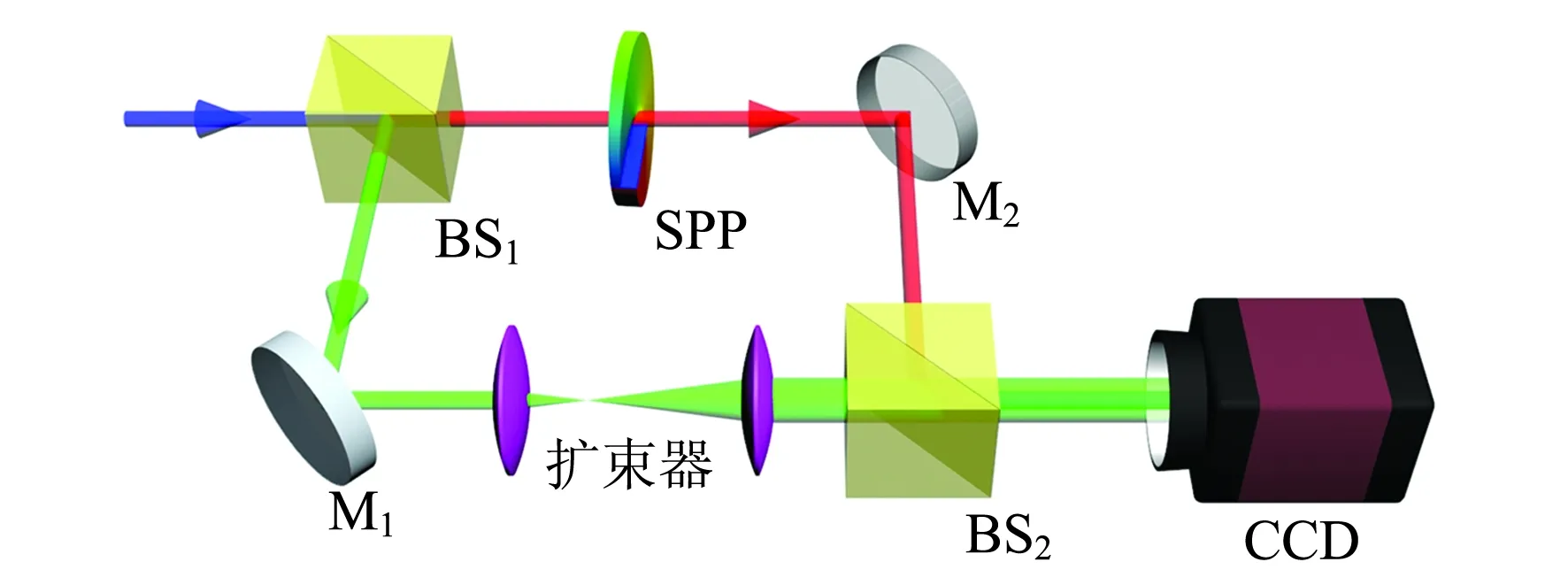
图8 涡旋光束与平面波干涉的示意图

(a)l=-3 (b)l=3 (c)l=5图9 轨道角动量量子数为-3,3,5的涡旋光束与平面波干涉的干涉图样(干涉图样中条纹的个数分别为3条,3条,5条,干涉条纹的旋转方向分别为顺时针、逆时针、逆时针)
条纹呈顺时针旋转;当l为正时,干涉条纹呈逆时针旋转. 因此,这种方法可以同时测量待测涡旋光束的轨道角动量量子数l的大小和符号.
4 角双缝干涉
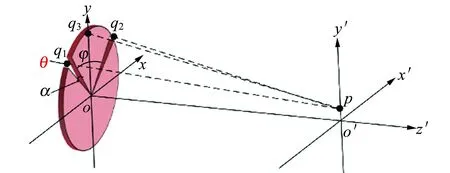
图10 角双缝干涉原理图
当1束具有螺旋相位项exp (ilφ) 的涡旋光束经过动态角双缝,由于螺旋相位项和角双缝到观察平面的光程差的存在,在观察平面上将会出现明暗相间的干涉图样,通过观察干涉图样光强的变化可以得到入射光束轨道角动量信息[35-38]. 如图10所示,其中,α是每个角缝的缝宽,φ是角双缝之间的夹角,q1和q2和q3是动态角双缝平面上的3个点,oq3是角双缝夹角∠q1oq2的角平分线,p是远场衍射图样上的点,θ代表附加相位. 2个缝在观察平面p点的电场分别为
E1(p)=u0(p)exp [iφ1(p)],
E2(p)=u0(p)exp [iφ2(p)],
(6)
其中u0(p)和φ(p)分别是振幅和相位. 因此,角双缝在点p的干涉光强分布为
I(p)=|E1(p)+E2(p)|2∝1+cos (Δφ),
(7)
其中,Δφ是角双缝到点p的相位差,由图10可知
等号右边第一项lφ是由涡旋光束的螺旋相位项引起的相位差,等号右边第二项是由几何光程差引起的相位差. 如果角双缝是关于o′p轴对称的,那么角双缝到点p的几何光程差为零,则角双缝到点p的相位差只依赖于由螺旋相位项引起的相位差,即Δφ=lφ,此时干涉光强的分布为I∝1+cos (lφ),当角双缝间的夹角φ由0变化到2π时,光强变化的周期等于l,如图11所示. 由于余弦函数是偶函数,因此l的正负无法从光强变化中识别. 为解决该问题,在角双缝的其中1个角缝上加附加相位θ. 那么角双缝在点p的相位差变为Δφ=lφ+θ, 则干涉图样的光强分布为
I∝1+cos (lφ+θ).
(8)
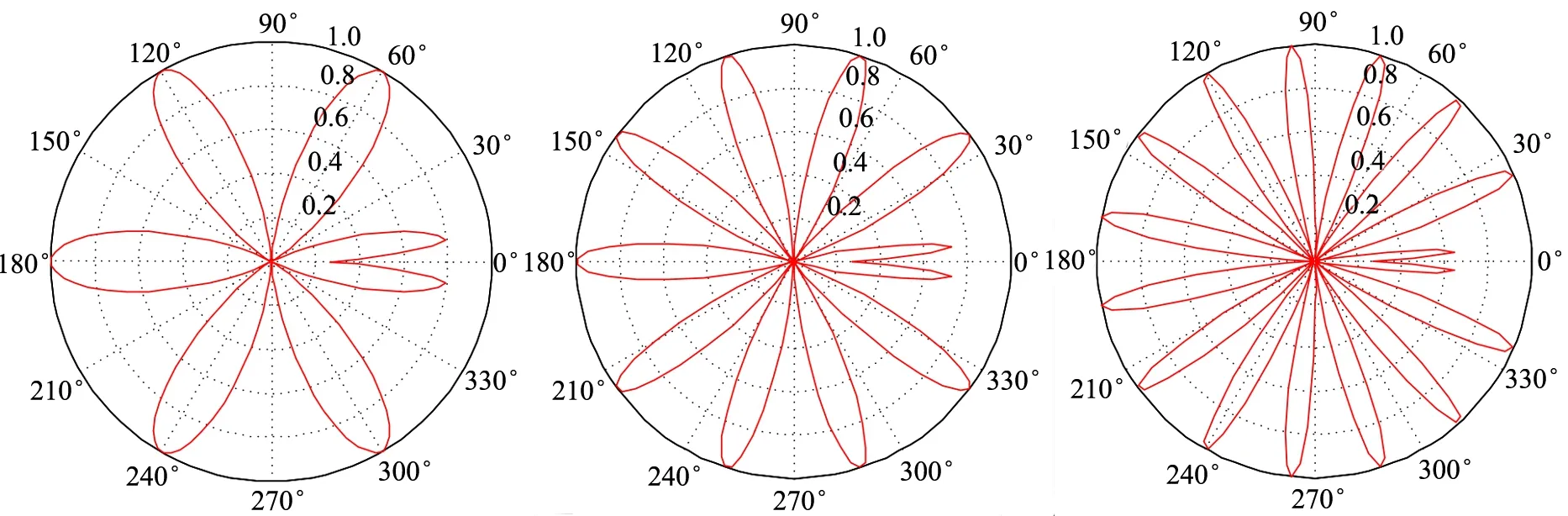
(a)l=6 (b)l=10 (c)l=15图11 强度随双缝间夹角的变化而变化的数值模拟
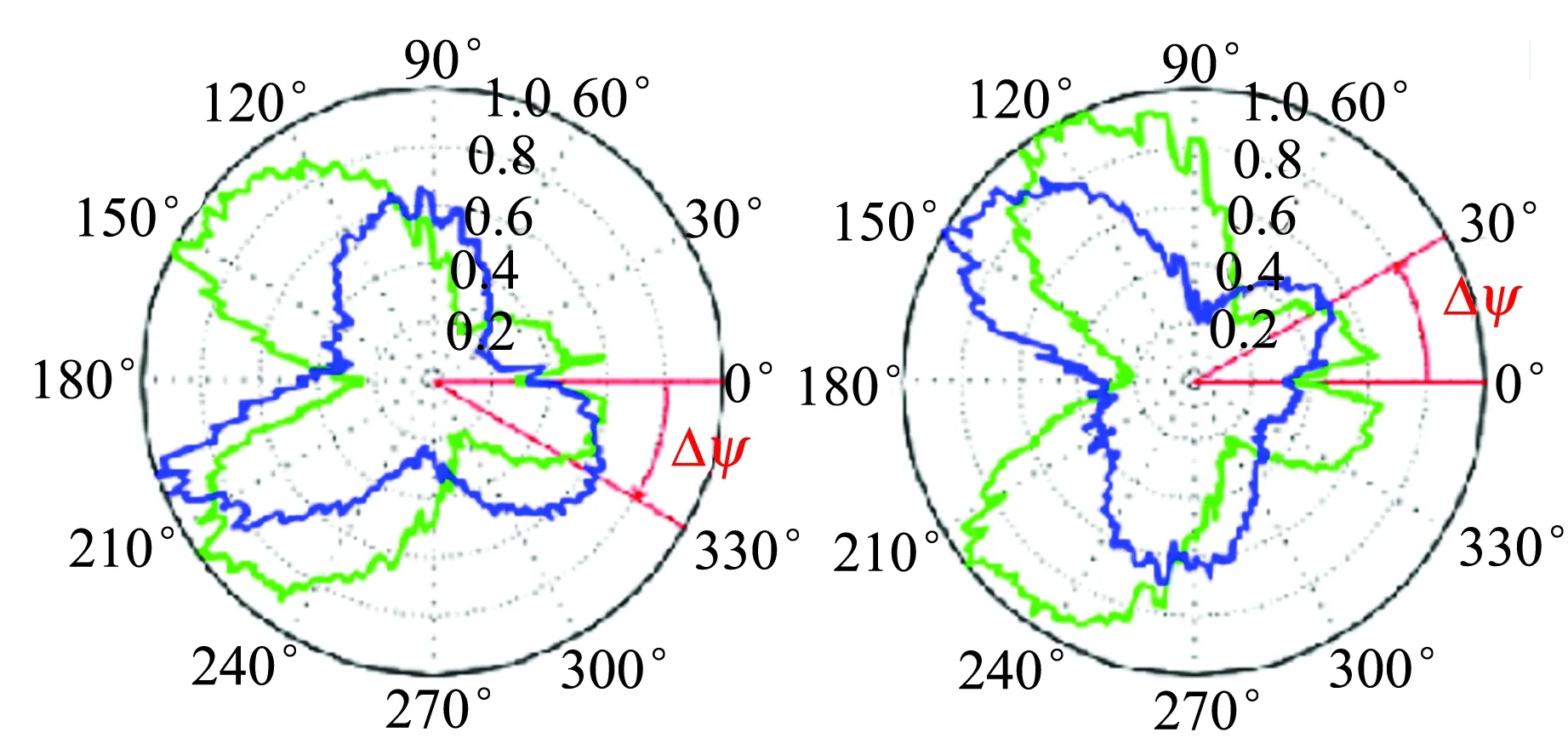
(a)l=3,ΔΨ=30° (b)l=-3,ΔΨ=30°

(c)l=6,ΔΨ=15° (d)l=-6,ΔΨ=15°
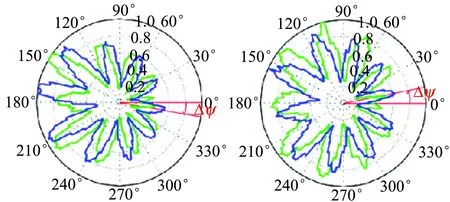
(e)l=10,ΔΨ=9° (f)l=-10,ΔΨ=9°图12 携带不同轨道角动量的涡旋光束经过角双缝后,干涉图样中心区域的光强随角双缝旋转的变化(φ-I曲线)
在这种情况下,附加相位会引起随角双缝夹角变化的光强分布曲线的旋转,旋转的方向和轨道角动量量子数l的正负有关. 因此,通过对光强变化曲线的分析可以得到轨道角动量量子l的大小与正负,如图12所示. 图12是干涉图样中心区域的光强随角双缝夹角的变化而变化的曲线(φ-I曲线),其中绿色的φ-I曲线是在没有加附加相位(θ=0)时得到的实验结果,因此,只能从中得到轨道角动量量子数l的大小,不能得到其正负的信息;蓝色的φ-I曲线是在有附加相位(θ=π/2)时得到的实验结果,从中可以看出,相对于绿色的φ-I曲线,蓝色的φ-I曲线有旋转. 通过对比绿色和蓝色的φ-I曲线可以得知:当轨道角动量量子数l为正时,蓝色的φ-I曲线沿顺时针旋转;当轨道角动量量子数l为负时,蓝色的φ-I曲线沿逆时针旋转. 因此,利用角双缝干涉,在有附加相位的条件下,可以很好地识别轨道角动量量子数l的大小和正负.
5 三角孔衍射
涡旋光束经过等边三角孔在远场的衍射图样可以折射出涡旋光束的轨道角动量量子数l的信息[39-41]. 当1束涡旋光束经过三角孔衍射,由夫琅禾费衍射积分得在远场的电场分布为

(9)
其中El(x,y,z=0)和τ(x, y)分别是入射涡旋光束的电场和三角孔平面的透射率函数. 通过数值求解式(9),得到不同轨道角动量模式经过三角孔夫琅禾费衍射图样的数值模拟结果,如图13所示,图13(a)中的插图为三角孔的方向. 从图13中可以看出,衍射图样呈三角形晶格阵列,而入射涡旋光束的轨道角动量量子数为l=N-1,其中N为衍射图样中三角形晶格阵列任意一边上晶格点的个数. 而l的正负可由三角形衍射图样的旋转方向来判断,如果入射的涡旋光束的轨道角动量量子数l的符号是相反的,则对应的衍射图样的旋转方向也是相反的. 另外,入射的涡旋光束的轨道角动量量子数l为负值的衍射图样相对于l为正值的衍射图样旋转了180°.

(a)模拟结果

(b)实验结果图13 不同轨道角动量模式经过三角孔衍射图样的数值模拟结果和实验结果
由于涡旋光束经过三角孔的衍射图样是经过三角孔三边的场相互干涉的结果,因此,接下来分析涡旋光束经过三角孔时,三角孔边缘对光束的影响. 如图14所示,假设入射的涡旋光束落在三角孔径的中心O点所在的区域,则沿三角形孔径任意一条边缝的相位为
(10)
其中a是三角形孔径每条边的边长. 现考虑三角形孔径的每条缝近似为无限小的缝,且忽略了场振幅的变化,则可以将缝视为狄拉克函数. 在这种情况下,涡旋光束通过三角孔其中一边时相应的电场为
exp (-ik·r)dxdy=
(11)
其中x和y是三角形孔径平面上横向笛卡尔坐标,kx和ky是傅里叶平面上的横向坐标. 由式(11)可知,三角孔衍射图样的大小和l成正比,且和三角形孔径边长a成反比,另外也可以看出,当入射的涡旋光束的轨道角动量量子数l的符号相反时,衍射图样的旋转方向是也是相反的.
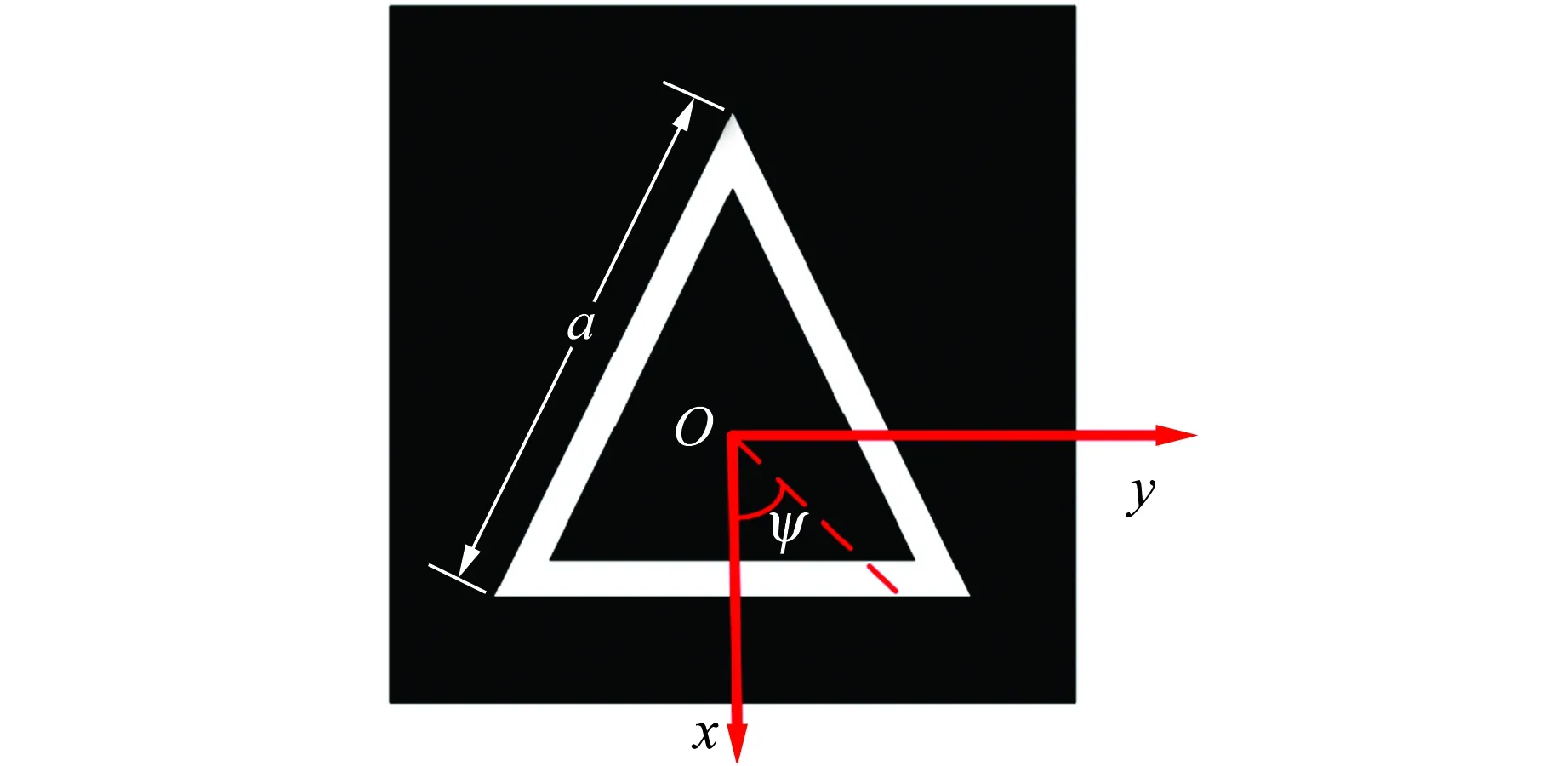
图14 三角孔示意图
6 计算全息光栅法
携带轨道角动量的涡旋光束可以用衍射光学元件(类似地,可以用螺旋相位板、Q-plate代替衍射光学元件)或计算全息光栅来产生[42-44]. 叉形光栅可以表示为
(12)
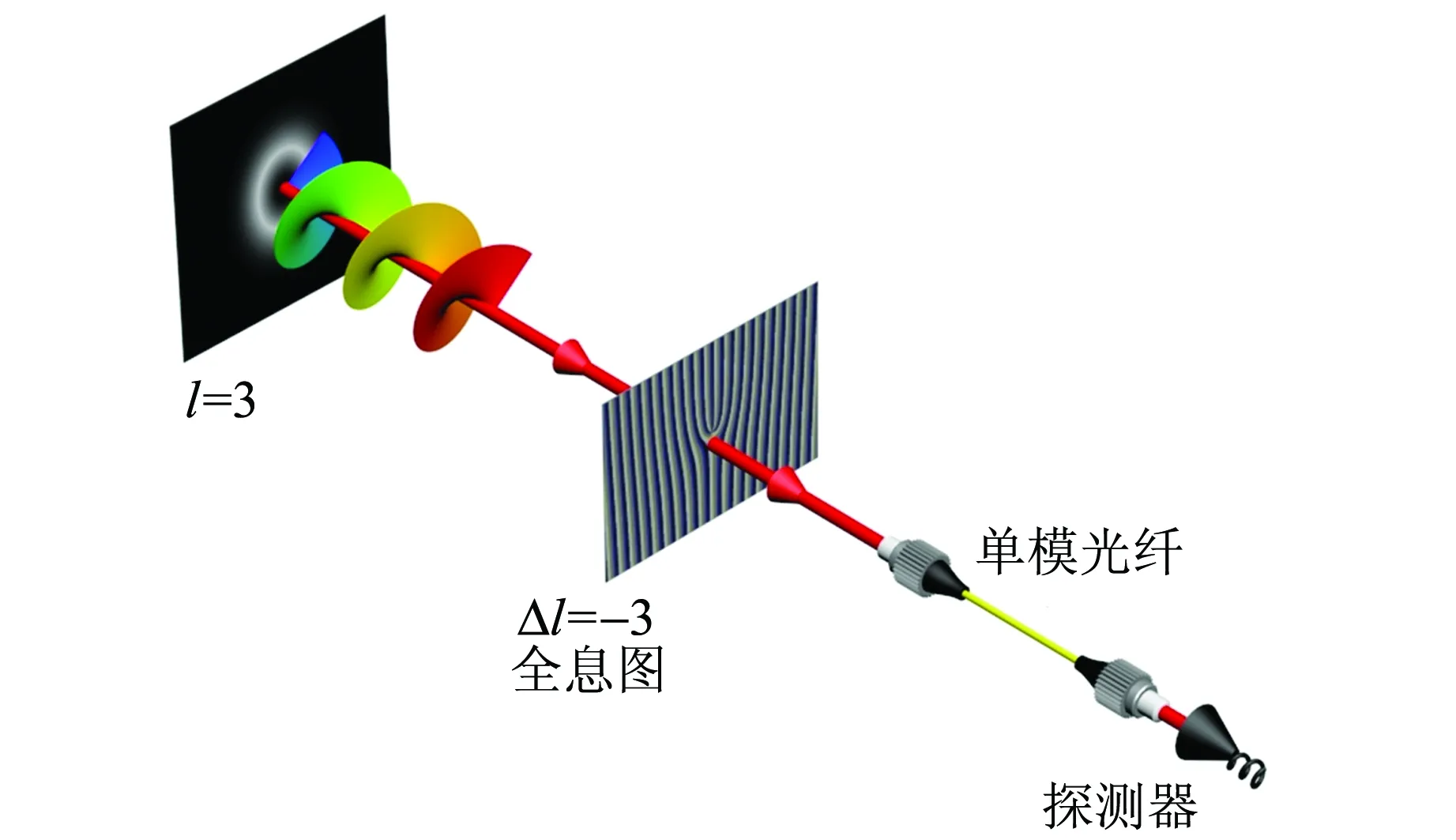
图15 1束轨道角动量量子数l=3的涡旋光束经过含有Δl=-3的叉形计算全息光栅
其中l是轨道角动量量子数,φ是方位角,Λ=2π/kx是沿x方向的光栅周期. 从激光器或者单模光纤输出的光束(基模高斯光束)经过含有l个错位的叉形衍射光栅,在衍射1级处的光束携带了lħ的轨道角动量. 反之亦然,如图15所示,当1束具有轨道角动量量子数l=3的涡旋光束入射具有3个错位的叉形光栅(Δl=-3),此叉形光栅可以将入射光束中携带轨道角动量为3ħ的涡旋光束变成基模高斯光束,即将其螺旋相位消除掉,然后基模高斯光束可以耦合进单模光纤中. 在这种情况下,全息光栅结合单模光纤可作为特殊的轨道角动量模式探测器,这个探测器在单光子水平下仍然工作[14,45-46]. 但该方法只允许对光子的特定轨道角动量模式进行检测,若待测光束中含有多个轨道角动量模式,则需一系列的全息光栅对其进行探测,用不同l值的全息光栅就可测出待测光束中是否含有相应的轨道角动量模式. 此外,用该方法来探测N个模式时,至少需N个光子,并会受到全息光栅和单模光纤(或小孔)过滤系统传输效率低的影响. 之后,更复杂的全息光栅被提出来,此全息光栅可探测几种不同的轨道角动量模式[47-49]. 如图16(a)所示的计算全息光栅是由2个正交叉形衍射光栅组成,水平放置的衍射光栅中心错位为1,竖直放置的衍射光栅中心错位为3. 水平和竖直叉形全息光栅可表示为
(13)
其中a的取值范围从0到2π. 这2个全息光栅相结合组成了3 × 3的阵列,当1束平面波入射此光栅时,可以产生轨道角动量量子数从l=-4到l=4的轨道角动量模式. 反之亦然,当1束具有轨道角动量量子数l∈[-4,4]的轨道角动量模式通过此计算全息光栅时,高斯模式的光束将出现在3 × 3阵列中相应的位置,此位置与入射涡旋光束的轨道角动量量子数l一一对应,如图16中(b),(c)和(d)所示. 因此,这种全息光栅可以测量9种轨道角动量模式中的任意一模式,但其效率近似等于模式个数的倒数. 另一种利用衍射光栅探测轨道角动量模式的方法是通过分析衍射图样的位置特征来确定待测光束的轨道角动量量子数l的大小和正负[50]. 此外,基于计算全息光栅和单模光纤的投影技术——量子态层析是有效测量轨道角动量模式的方法[51-52].
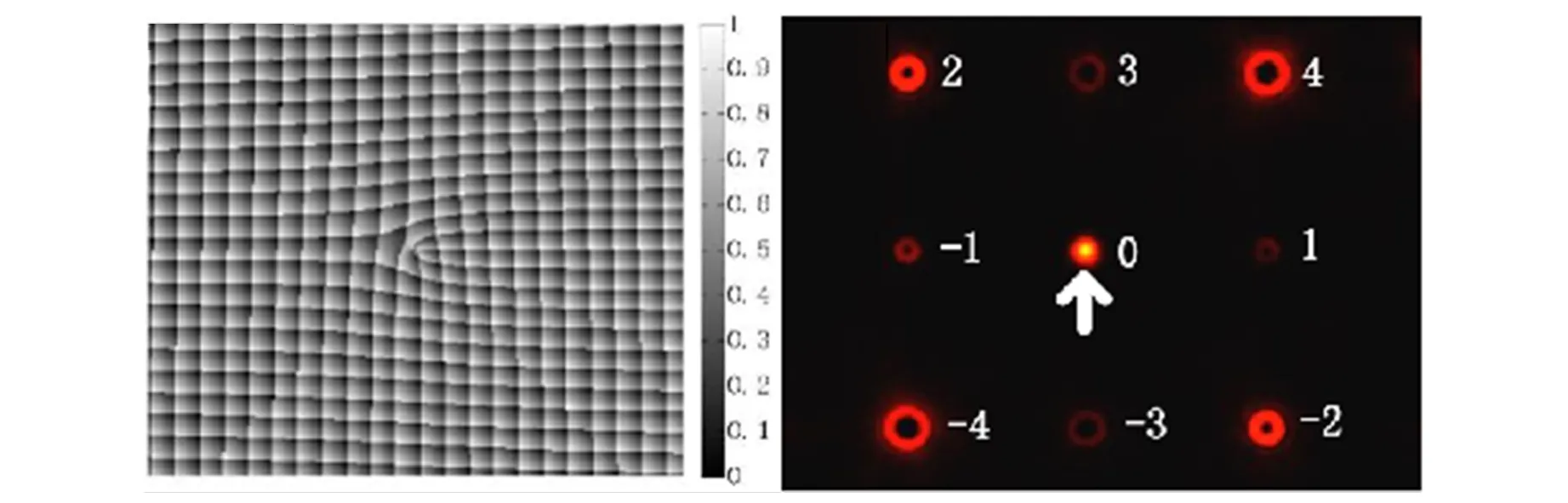
(a)二维叉形衍射光栅 (b)l=0
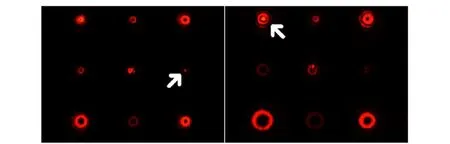
(c)l=1 (d)l=2图16 经过叉形光栅后得到的实验结果
7 光学几何变换法
光波可以分解成不同方向的平面波的叠加,透镜可以将这些平面波聚焦到其局部平面上的不同的位置,其横向位置取决于平面波的传播方向. 基于这一特性,Berkhout等人提出利用2种衍射光学元件对轨道角动量模式进行分离的有效方法[53-55]. 此方法中,其中一个衍射光学元件用于几何变换,即将轨道角动量模式对应的笛卡尔坐标中的方位位置转换为横向动量态对应的对数极坐标中的横向位置;另一个衍射光学元件用于矫正经过几何变换时引入的相位畸变. 相位校正后,利用透镜将每个依赖于输入轨道角动量模式的横向动量态聚焦到1个平面的不同横向位置.
如图17所示,空间光调制器(SLM1)用于产生待测的轨道角动量模式,SLM2和SLM3分别用于产生所需的相位剖面φ1(x,y)和φ2(uv),(x,y)和(u,v)分别是输入平面和输出平面的笛卡尔坐标系. 如图18所示,φ1(x,y)和φ2(u,v)表达式为
(14)
其中λ是入射涡旋光束波长,f是傅里叶透镜的焦距,a与转换后光束的长度d有关,b与输出平面的坐标有关(a和b是缩放常数). 由于φ1(x,y)和φ2(u,v) 分别实现了笛卡尔坐标与对数极坐标的变换和相位校正,因此由同心圆组成的输入图像(x,y)将会转变成平行线的输出图像(u,v). 经过相位校正元件后,利用透镜将转换后的态分离到观察平面指定的横向位置,聚焦点的横向位置取决于输入的轨道角动量模式,其关系为

图17 实验装置示意图
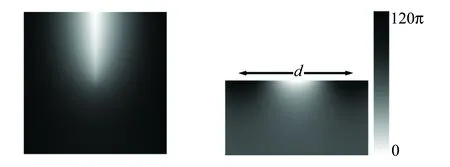
(a)几何变换 (b)相位矫正 图18 光学元件的相位剖面
(15)
根据探测平面的强度分布,待测光束中所含的轨道角动量模式可以被识别出来,如图19所示,第1列是待测涡旋光束经过几何变换元件(SLM2)之前的相位和光强分布,第2列是待测涡旋光束经过相位校正元件(SLM3)之后的相位和光强分布,最后2列分别是在探测平面上的数值模拟结果和实验结果. 此外,此方法可以用来识别轨道角动量的叠加态,如图19最后1行所示. 但是,由于衍射极限的存在,2个相邻的轨道角动量模式产生的光斑略有重叠. 为了解决这一问题,Boyd等人提出利用光束复制装置来增强转换后的轨道角动量模式分离的方案[55-56]. 另外,他们利用光学几何变换结合光束复制技术,通过对轨道角动量的弱测量和角位置的强测量,得到了不同轨道角动量模式的复振幅[57]. 此外,由于空间光调制器的衍射效率有限,可以用折射率元件将其代替来执行笛卡尔坐标到对数坐标的变换[58-59].

图19 数值模拟结果和实验结果
8 旋转多普勒效应法
旋转多普勒效应类似于传统的多普勒效应,是在角动量的基础之上发生的多普勒效应. 如图20所示, 当1束携带轨道角动量量子数l、频率为f的涡旋光束入射到旋转物体表面,其转速为Ω,则在散射光中会发现旋转多普勒效应,频移量为Δf=(l-m)Ω/2π,其中m表示散射光中的轨道角动量量子数. 若旋转物体的转速已知,则通过测量散射光中特殊模式的频移量就可以得到入射光束携带的轨道角动量[60-61].
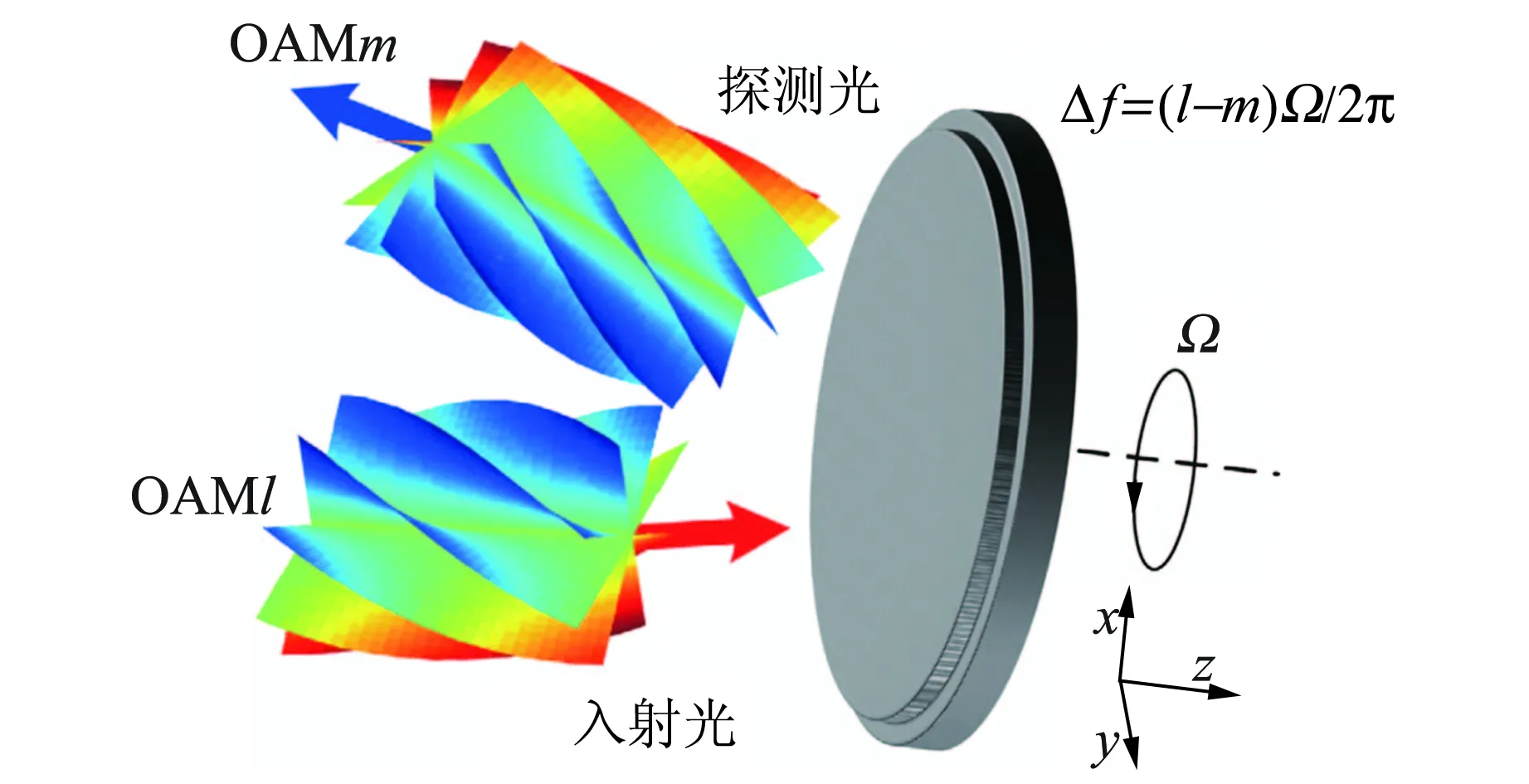
图20 旋转多普勒效应示意图
旋转物体对入射涡旋光束的作用是进行了相位和振幅调制,将旋转考虑进去,则物体的调制函数用傅里叶展开可表达为
M(r,φ)=∑An(r)exp (inφ)exp (-inΩt),
其中n为整数,An(r)为n阶谐波复振幅,满足∑ |An(r)|2=1. 若入射光束是携带多个轨道角动量叠加态的涡旋光束,即含有N个未知的轨道角动量模式,可将入射的涡旋光束表示为
(16)
其中ls是轨道角动量量子数,取值范围为l1到lN,f是入射涡旋光束的初始频率,Bs表示入射涡旋光束的相应模式的复振幅. 引入参考光γB0exp (-i2πtf)exp (il0φ),参考光和待测的涡旋光束一起入射到旋转物体上,其中γ是用来调节参考光光强的参数. 那么从旋转物体上散射的光束的复振幅的表达式为
B1exp (-2iπtf)Am-l1exp (imφ)exp [-i(m-l1)Ωt]+
B2exp (-2iπtf)Am-l2exp (imφ)exp [-i(m-l2)Ωt]+
…
BNexp (-2iπtf)Am-lNexp (imφ)exp [-i(m-lN)Ωt],
(17)
由式(17)可知,所有的入射模式经过旋转物体后均转换成一系列相同的轨道角动量模式,这意味着散射光束经历了和入射涡旋光束的轨道角动量量子数ls成线性关系的多普勒频移. 当散射光束传播一定距离后,利用模式滤波器选择其中1个模式,假设该模式为OAMm,一般情况下m=0,即OAM0模式,然后利用光电探测器对该模式进行探测. 由于拍频效应,则收集到的光强分布可表示为

(18)



(19)
如果lp-l0(p=1,2,…,N) 不改变符号,那么轨道角动量量子数lp会一一对应的映射到频率空间,而且其系数与相应的轨道角动量模式的复振幅有关. 如果所有的系数An和B0都是已知的,则可以通过对收集到的光强进行分析得到轨道角动量模式的谱分布. 需要注意的是,当考虑沿径向方向的差异的情况下,φp,0是通过复杂的积分得到的值,而且φp,0并不等于相应的入射的轨道角动量模式的相位. 但φp,0和相应的入射的轨道角动量模式的相位总是有固定的偏差,因此可以预先测量出这个偏差,然后对测得的结果进行校正就可以得到完整且正确的轨道角动量谱分布(包含复振幅分布和相位分布). 如图21所示,输入的轨道角动量模式的振幅分布是三角形分布的情况下的实验结果,图21(a)显示的是输入光的仿真图样和实验图样. 测量得到的轨道角动量模式的功率和相位分布分别如图21(b)和21(c)所示,其中蓝色是仿真结果,红色是实验结果. 因此,此方法不但可以测量光束中所含的轨道角动量模式,还可以测量各个轨道角动量模式的振幅和相对相位.
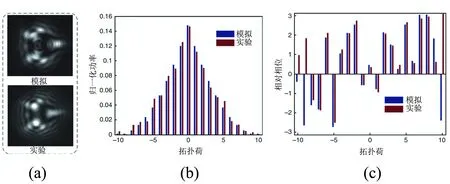
图21 输入的轨道角动量模式的振幅分布是三角形分布的情况下的实验结果
9 结束语
轨道角动量量子数l和径向量子数p是表征拉盖尔-高斯模式的基本物理参量. 由于拉盖尔-高斯模式的高维和光学涡旋特性,使得其在经典和量子领域展示出了巨大的应用潜力,已经引起人们广泛的关注. 根据轨道角动量量子数l和径向量子数p区分不同拉盖尔高斯模式的能力对基于拉盖尔-高斯模式的应用至关重要. 对于光子来说,在傍轴近似的条件下,其自旋角动量和轨道角动量是相互分离的,通过偏振分束器和波片可以很容易地将光子按照其偏振状态进行分离,然而,根据光子的轨道角动量对光子进行分离是比较复杂的问题. 目前,根据探测光子轨道角动量的方法有很多,本文中我们主要对光学系统中探测轨道角动量模式的方法以分类的形式给予阐述. 西安交通大学理学院量子光学团队长期从事涡旋光的理论和实验研究,角向双缝干涉方法和旋转多普勒方法均为我们首先提出. 我们还利用光的轨道角动量作为信息载体,在精密测量、高维量子计算、高维量子通信等领域取得一系列研究成果,承担了国家自然科学基金重点项目等多项课题.
