基于蚁群算法的水下机器人机械臂工作路径优化
2019-03-15林树锋王冬姣叶家玮
林树锋, 王冬姣, 叶家玮, 刘 鲲
基于蚁群算法的水下机器人机械臂工作路径优化
林树锋, 王冬姣, 叶家玮, 刘 鲲
(华南理工大学 土木与交通学院, 广州 广东, 510641)
为了提高水下机器人机械臂对导管架清污的工作效率, 缩短电机持续高负荷工作的时间, 在采用声呐回波数据识别工作区域附着物分布图的基础上, 分别以工作时间最短和能耗最小为优化目标, 提出基于蚁群算法的机械臂工作路径规划算法。通过MATLAB和PRO/E软件建立机械臂三维运动学模型, 在某一随机附着物分布条件下, 采用以上2种路径优化算法得到相应的优化路径。仿真结果表明, 与传统的扫描路径相比, 文中提出的2种优化算法在满足工作区域范围的前提下, 能提高机械臂2倍以上的工作效率并降低50%的能耗, 证明了该路径优化算法的有效性。
水下机器人; 蚁群算法; 路径优化
0 引言
导管架平台是近海油气开采的主要基础设施, 其安全性能关系到人员和生产安全。而在平台服役期间, 由于大量海洋生物长时间附着在导管架上, 会造成导管架平台桩基的严重腐蚀, 从而危害平台安全。据统计每年约有8%~10%的海洋平台因为海洋生物腐蚀发生过事故, 造成的损失高达数百亿美元[1]。因此, 导管架水下部分结构一般需要定期清理维护。
目前, 国内外研究机构针对导管架附着生物主要采用刷具和高压水射流技术的清洗方式, 并成功研制出模型机用于作业, 例如哈尔滨工程大学机器人研究所研制的永磁吸附履带式攀爬机器人[2]、美国卡内基梅隆大学研制的干燥橡胶粘附材料微型机器人等[3]。这类机器人均采用壁面吸附原理, 体积较小, 负载能力较低, 限制了其工作强度。针对上述问题, 文中采用双抱臂系统设计了一台用于深海除污的水下机器人。机器人配备了一个6自由度的机械臂, 在机械臂末端安装了高压水枪, 如图1所示。由于深海作业环境下海水能见度低, 除了装有摄像头外, 通过借鉴汤渭霖[4]、朱利超等[5]利用声呐目标回波的亮点模型原理进行声呐成像上的研究成果, 在机器人本体装配了一套用于识别工作区域的声呐系统。

图1 双抱臂机器人
导管架平台结构体积庞大, 水下清污作业工作量大, 如何合理规划机器人的机械臂作业路径, 高速有效地完成清洗任务, 显得十分关键。文中利用声呐回波数据识别工作区域, 得到海蛎子等附着物分布图像, 采用蚁群算法以时间最优和能量最优作为优化目标, 规划机械臂的工作路径,使其能够高速有效地完成清洗任务。
1 机械臂工作路径优化理论
1.1 机械臂关节空间轨迹求解
机械臂主要由连杆和连杆间的关节组成。每个连杆用4个运动学参数描述, 即连杆长度、连杆偏移量、关节角和扭转角。这种用连杆参数描述机构运动关系的规则称为D-H参数[6]。
文中研究的水下机器人工作机械臂示意图如图2 所示, 其连杆主要几何参数见表1。根据连杆参数可得到各连杆的变换矩阵为



图2 6自由度机械臂简图
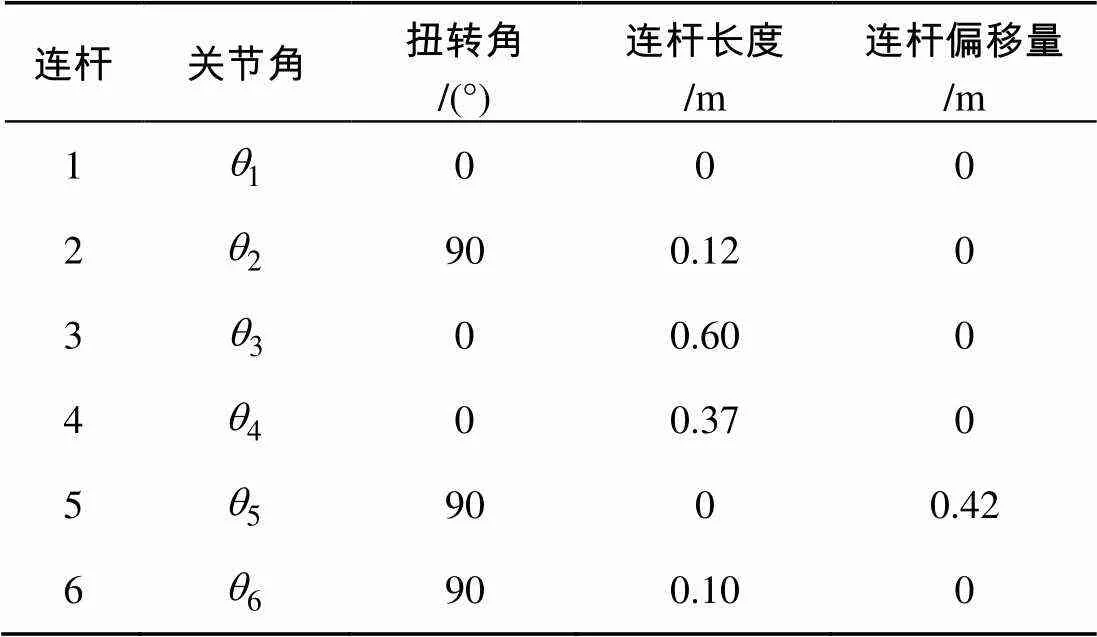
表1 机械臂D-H参数表


1.2 蚁群优化算法
蚁群算法是一种仿生学算法。蚂蚁在觅食过程中会释放信息素, 这些信息素会形成一条指示轨迹。从起点到终点, 在短路径上留下激素的量越多, 在长路径上留下的激素就越少。以此类推, 后来的蚂蚁选择激素浓度大的路径概率就越大, 反之, 则越小[7]。图3为蚁群觅食模拟原理图。
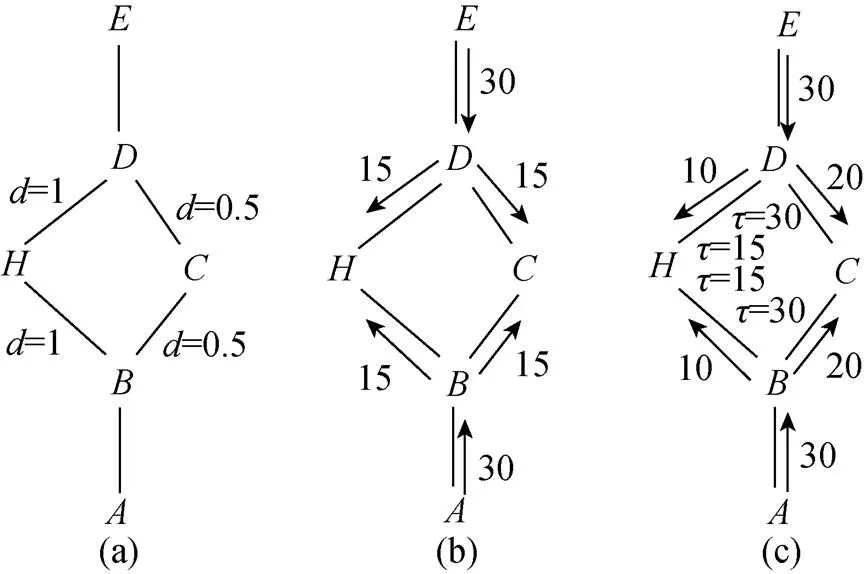
图3 蚁群觅食模拟图
图中:是蚁穴,是食物源, 蚂蚁只能通过或由到。由于路径更短, 蚂蚁在其上留下的信息素强度高, 该路径被其他蚂蚁选择的概率就高。随着信息素的积累, 蚂蚁趋向于路径。
在路径优化问题中, 蚂蚁随机分配到各个目标位置, 且各目标位置只能被访问一次, 故蚂蚁(=1, 2, 3,…,)在点访问下一个点的概率为



式中: ρ为信息素衰减系数; 为上次搜索路径后的信息素; 为第k只蚂蚁的搜索路径; 为第k只蚂蚁在路径上的信息素增量, Q为信息素增量系数, 为本次搜索的最优解, 与有关。蚁群算法步骤如图4所示。
2 基于蚁群算法的机械臂路径优化
文中采用MATLAB和PRO/E软件建立三维仿真系统, 模拟水下机器人在直径为1 m的导管架立柱上进行作业, 对机械臂进行路径优化。机械臂的工作空间如图5所示, 根据机械臂的工作空间及声呐回波数据成像, 得到机器人当前位置下可工作柱面上海洋生物附着位置信息, 即机械臂的工作目标点。假设获得的工作点分布如图6所示。其中1号点为初始位姿末端所处的位置, 其余点均分布于圆柱面上, 随机编号。目标点的坐标以及对应的关节角度如表2所示。根据不同优化目标, 对机械臂进行运动学和动力学分析, 得到优化轨迹。
2.1 能量最优的优化结果
针对深海水下机械臂, 运用叠加原理将水动力分解为静水环境下的搅水力和来流冲击力。采用Morison公式估算机械手的搅水力, 因机械手是慢速运动, 故忽略辐射阻尼的影响, 只考虑机械手的附加质量所引起的附加力矩。机械臂几何外形近似长方体, 附加质量系数取1.2, 产生的附加转动惯量约为浮重条件下的14%。结合式(6)得到如表3所示的机械臂动力学参数表。
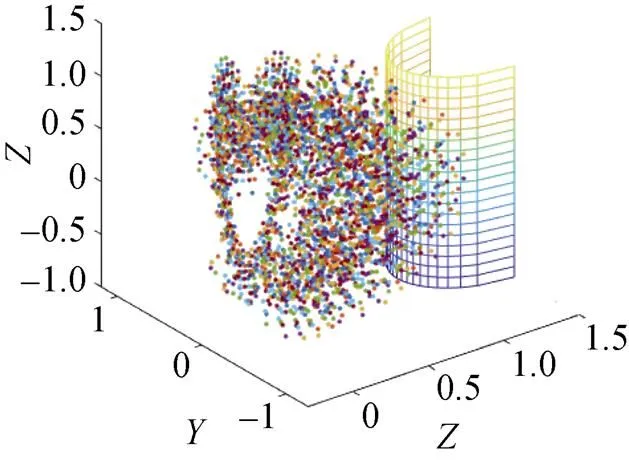
图5 机械臂工作空间

图6 工作点分布的声呐扫描成像结果
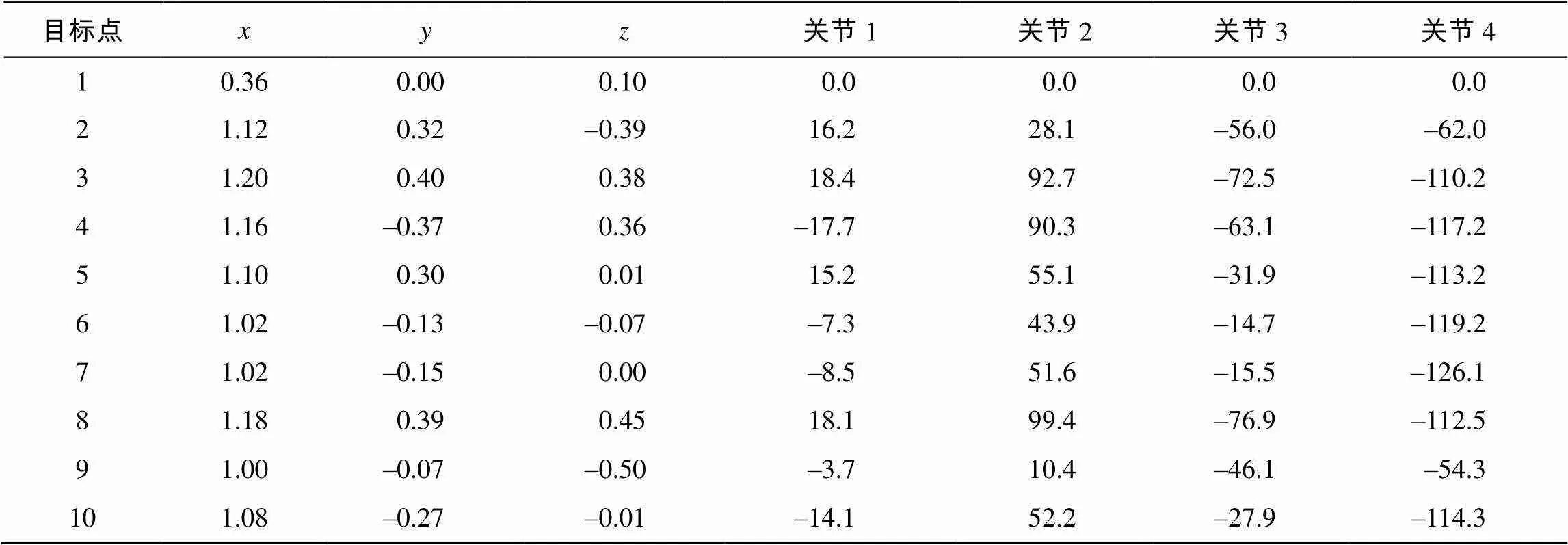
表2 导管架圆柱表面目标点坐标和关节角度(前10个点)
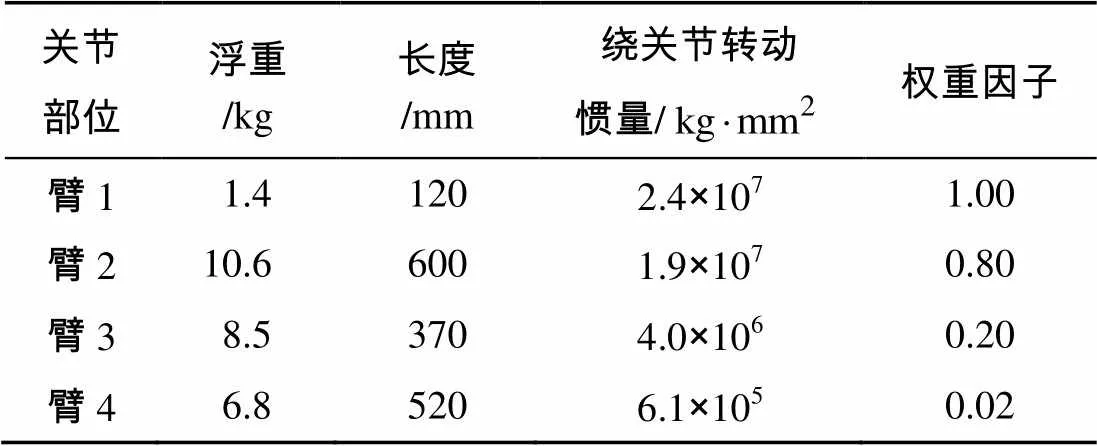
表3 机械臂动力学参数
根据表3计算结果, 建立以能量最优为目标的数学模型

图7和图8为以能量最优为优化目标的优化结果, 得到该种优化方式下的最佳路径: 1–22– 13–20–21–18–17–2–19–11–30–23–25–26–6–7–10–16–15–4–24–14–8–3–5–12–9–28–29–31–32–27。

图7 能量最优路径优化结果
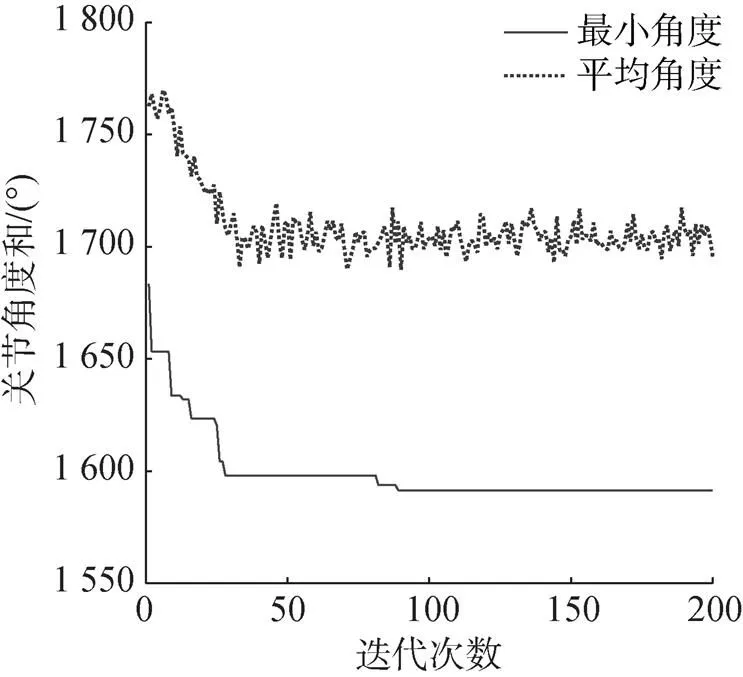
图8 能量最优迭代曲线
2.2 时间最优的优化结果
在以时间最优为优化目标的算法中, 不考虑机械臂4个大关节的差别, 假定每次只转动一个关节, 且各关节转动相同角度所需的时间相同, 研究如何规划目标点的顺序, 使机械臂的所有关节转动的角度之和最小, 即所用的时间最小。
其数学模型表达式

优化结果如图9和图10所示。得到以时间最优为优化目标的最佳路径: 1–9–23–30–11–9–2– 17–21–18–20–13–22–26–25–10–6–7–12–5–16–15–4–14–3–8–29–32–31–28–27–24。

图9 时间最优路径优化结果

图10 时间最优迭代曲线
3 优化方法对比分析
在评估中添加以扫描方式得到的路径作为参照, 根据式(8)和式(10)计算这3种算法的路径优劣性, 其对照结果如图11所示。由表可知, 3种路径规划中, 以能量消耗为优化指标时, 第2种优化方式仅仅比第1种多3%; 以时间耗费为优化指标时, 第1种优化方式比第2种高13%, 这2种优化方法结果差异较小; 相比前2种, 第3种传统扫描路径在2个指标均高出1倍多, 也就是说在机械臂第2工作阶段中, 无论采用能量最优还是时间最优的算法, 均能使机械臂的能量和时间消耗相比于扫描路径方式节省50%以上, 大大提高机械臂的工作效率。
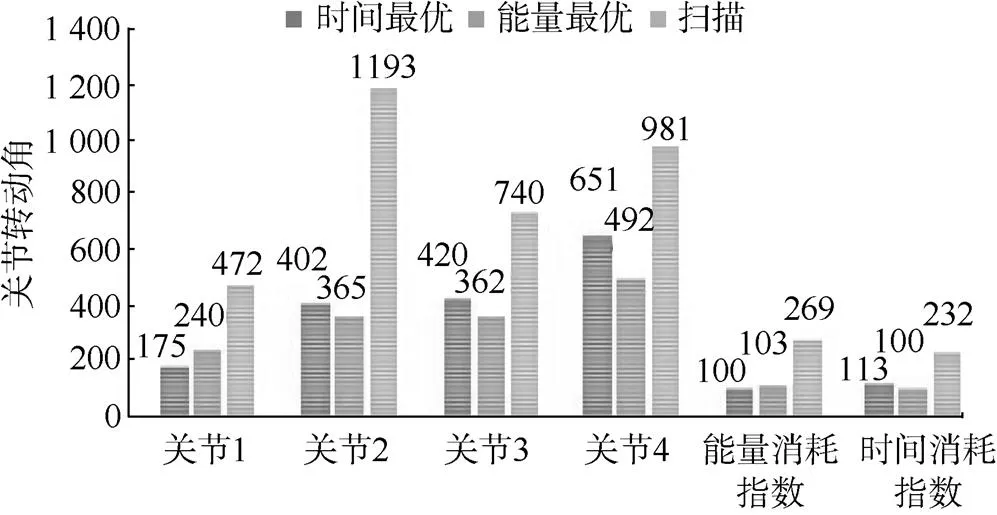
图11 优化方法对照结果
4 结束语
文中针对水下除污机器人的工作流程研究了基于能量和时间最优的蚁群算法, 其中考虑了如何在利用声呐成像原理获取导管架平台工作区域目标点的基础上, 求解目标点与机械臂角度的数学关系, 建立机械臂转动角度与优化目标的数学模型, 并利用MATLAB软件进行仿真, 得到了最佳工作路径。仿真结果表明该算法简单有效。
但文中求解的最终方案是假定机械臂预设工作路径中不会出现碰撞问题, 这个与现实工作情况有一定差距, 需要在优化算法中添加无碰撞约束条件, 这将是今后进一步的研究方向。
[1] 魏羲. 浅谈海洋生物污损对导管架平台安全的影响[J].全面腐蚀控制, 2015, 29(2): 55-57. Wei Xi. Discussion on the Influence of Marine Biofouling of Jacket Platform Security[J]. Total Corrosion Control, 2015, 29(2): 55-57.
[2] 付宜利, 李志海. 爬壁机器人的研究进展[J]. 机械设计, 2008, 25(4): 1-5.Fu Yi-li, Li Zhi-hai. Researching Headway of Wall-Climbing Robots[J]. Journal of Machine Design, 2008, 25(4):1-5.
[3] Mel Siegel. Remote and Automated Inspection: Status and Prospects[C]//The First Join DoD/FAA/NASA Conference on Aging Aircraft. Ogden UT: DoD/FAA/NASA Conference on Aging Aircraft, 1997.
[4] 汤渭霖. 声呐目标回波的亮点模型[J]. 声学学报, 1994, 19(2): 92-100. Tang Wei-lin. Highlight Model of Echoes from Sonar Targets[J]. Acta Acustica, 1994, 19(2): 92-100.
[5] 朱利超, 魏鹏举, 高杰, 等. 基于亮点模型的水下目标近程回波仿真研究[J]. 舰船电子工程, 2011, 31(11): 153-155. Zhu Li-chao, Wei Peng-ju, Gao Jie, et al. Simulation of Echoes from Underwater Scaling Targets in Short Range Based on Highlight Model[J]. Ship Electronic Engineering, 2011, 31(11): 153-155.
[6] Denavit J, Hartenberg R S. A Kinematic Notation for Lower Pair Mechanisms Based on Matrices[J]. ASME Journal of Applied Mechanics, 1955, 77(6): 215-221.
[7] 吴庆洪, 张颖, 马宗民. 蚁群算法综述[J]. 微计算机信息, 2011, 27(9): 1-2, 5. Wu Qing-hong, Zhang Ying, Ma Zong-min. Review of Ant Colony Optimization[J]. Control & Automation, 2011, 27(9): 1-2, 5.
Working Path Optimization of Manipulator Arm of Underwater Robot Based on Ant Colony Algorithm
LIN Shu-feng, WANG Dong-jiao, YE Jia-wei, LIU Kun
(School of Civil and Transportation Engineering, South China University of Technology, Guangzhou, 510641, China)
To improve the efficiency of the manipulator arm of an underwater robot for cleaning jackets and to shorten the motor working time under high load, the sonar echo data are used to identify the distribution of attachments onto the working area,and two working path planning algorithms of manipulator arm based on ant colony algorithm is proposed by respectively taking the shortest working time and the minimum energy consumption as the optimization targets. A three-dimensional kinematic model of the manipulator arm is established through the software MATLAB and PRO/E. Two optimal paths are obtained by the proposed algorithms for a certain random attachment distribution. Simulation results show that compared with the traditional scan path, the proposed two working path planning algorithms increase the working efficiency of the manipulator arm by more than 2 times and reduce its energy consumption by 50% under the premise of satisfying the range of working area, verifying the feasibility of the two proposed path planning algorithms.
underwater robot; ant colony optimization; path optimization
林树锋, 王冬姣, 叶家玮, 等. 基于蚁群算法的水下机器人机械臂工作路径优化[J]. 水下无人系统学报, 2019, 27 (1): 45-50.
TP241.3; TE58
A
2096-3920(2019)01-0045-06
10.11993/j.issn.2096-3920.2019.01.008
2018-08-31;
2018-11-14.
国家重点研发计划项目(2016YFC1400202); 广东省科技项目(2015B010919006); 中国博士后面上基金资助(2017M6 22692).
林树锋(1993-), 男, 在读硕士, 主要研究方向为水下机器人运动控制.
刘 鲲(1986-), 男, 讲师, 主要研究方向为海洋工程结构振动控制, 电子邮箱: kunliu_hit@hotmail.com.
(责任编辑: 陈 曦)
