基于arm的水上垃圾清理机器人设计方法
2019-03-14华洵曹雪花
华洵 曹雪花
摘要:当前水体污染给人们的生产生活,给社会生态环境都带来了非常严重的影响,越来越受到社会的普遍关注。目前清理水体污染物主要是靠人工进行打捞,人力物力耗费较大,为有效解决这个问题,本文设计制作了一款由人工远程遥控对水面上的塑料袋、饮料瓶、树枝树叶等固体垃圾进行清理的机器人。该机器人除整体上采用水面稳定性较高的双船体结构外,还包括图像传输单元、动力推进装置、打捞及传输装置等便于快速完成垃圾清理任务的相关机构。该机器人在人工协助下能够对水面上的固体垃圾物清理实现自动化作业,整个打捞过程无须人工直接参与,安全、便捷。
关键词:水体污染;垃圾清理;水中机器人
中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2019)01-0237-03
Arm-based Design Method for Water Garbage Disposal Robot
HUA Xun1, CAO Xue-hua2
(1.Wuxi No. 1 Middle School, Wuxi 214031, China; 2.Jiangyin Polytechnic College Jiangsu, Jiangyin 214405, China)
Abstract: At present, water pollution has seriously affected people's production and life and social ecological environment.and now the cleaning of water pollutants mainly relies on manual salvage, which consumes a large amount of human and material resources. In order to effectively solve this problem,this paper designed and built a robot which can be used to clean plastic bags, beverage bottles, branches, leaves and other solid wastes on the water surface by manual remote control. In addition to the two-hull structure with high surface stability as a whole, the robot also includes image transmission units, power propulsion devices, fishing and transmission devices, and other related mechanisms that facilitate rapid garbage disposal. The robot can clean up solid waste on the water surface automatically with the help of human hands. The whole fishing process is safe and convenient without direct human involvement.
Key words: water pollution; garbage diposal; Underwater robot
1 机器人结构设计
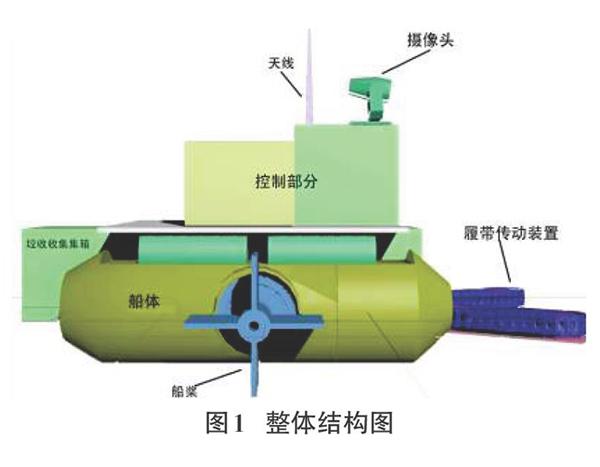
本文设计的水面垃圾清理机器人整体采用双体船结构[1],可以在较大的风浪下稳定工作。两船体间安装容量较大的网状式垃圾收集箱,配合履带式辅助收集机构完成水面垃圾收集和短时存储。下图一为本文设计的水面垃圾清理机器人整体结构图。
如图1所示,本款水面垃圾清理机器人的主要组成单元包括推进装置、船体运动控制器、无线通信及水面垃圾视频检测装置等相关机构。
在船体中部,设有网状式垃圾收集装置,容量大且可快速更换,最前端的履带式辅助回收装置有两路电机拖动,不仅能增加船体前向运动的动力,而且能够将周围的垃圾借助水流吸附到回收器中。
视频监控装置可以借助无线通信单元将水面视频实时传输到监控平台上,方便操作人员观察人眼无法看到的区域内的垃圾分布情况并操作机器人准确收集这些区域内的垃圾。
2 硬件设计
本文设计的水面垃圾清理机器人的硬件组成[2,3]主要是指控制系统、动力单元以及图像传输单元所涉及的硬件部分。主要包括电源供电模块、电机驱动模块、无线传输收发模块、主控制器模块、继电器模块、图传模块等相关模块。
机器人的主控制器选用32位微处理器 STM32F103VET6[4,5],其工作主频为72 MHz,该款处理器功耗低,处理速度快,自带的多路PWM输出单元便于对电机进行控制,能够满足双电机快速差速运动的需要,自带高速的IIC、SPI接口控制器,方便于外部设备进行通信,自带的AD采集通道便于实现各種模拟量的采集。
电源部分采用12V ,7.4V等电压等级的可充电电池为系统供电,还配有二路电压转换模块对7V电压源进行转换,分别得到3.3V,5V的电压为STM32控制板、继电器组、遥控器接收机、图传模块提供电源。
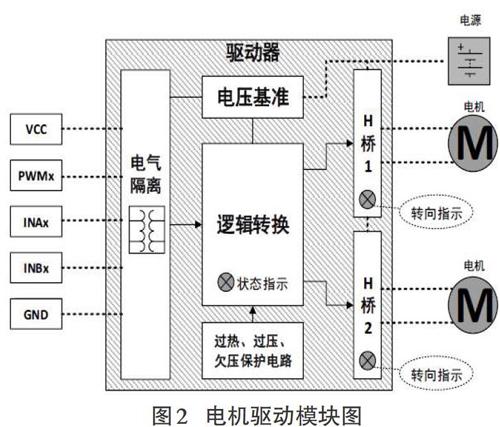
电机驱动模块采用7V-48V60MA宽电压大功率无刷直流电机驱动器HS-6026,该款驱动器具有以下功能特点:
(1) 小尺寸
(2) 多重保护,内置过电压、欠电压、过热保护电路
(3) 控制信号全隔离,充分兼容 3-5V电压输入
(4) 大功率,无须再加散热处理,即可驱动 60MA电机负载
(5) 高速PWM隔离输入,最小脉冲宽度3us,隔离带宽10MHz
(6) 支持满占空比输入,可脱离MCU,实现外部开关直接控制,可串联限位开关
(7) 具有红蓝双色转向指示灯指示电机运转方向。
(8) MCU与电机驱动完全电气隔离,使MCU电磁兼容性能大大提高,其次还可保证控制电路的电气安全,即使出现严重的短路过压等情况,也不用担心MCU被窜入高压而烧毁,同时具有良好的控制稳定性。
下图2给出了该模块与电机和控制之间的连接示意图:
无线传输单元是人机协同工作的重要环节,该部分主要由遥控接收机、遥控器,接收机通道选择器等硬件组成,通道选择器选用74ls151八选一通道选择器实现,主要是为了节省控制器管脚。控制器定时切换选择器的输入通道,并检测输出通道的脉宽决定接收机接收到的是哪一路遥控信号。
图像传输单元是为了能够协助机器人操控人员快速、准确发现水面垃圾而设置的,采用ov7670摄像头配合图传发射器,完成水面垃圾搜索任务,通过舵机控制摄像头转角,可以完成360度、半径为2-3米范围内的水面垃圾搜索,ts832图传系统具有重量轻、体积小、方便安装等特点,具有5.8G九百多个发射机频道,支持12V电压供电,图像清晰准确,图像实时显示在遥控器外接的显示屏上,方面操作人员实时观测。
3 软件设计
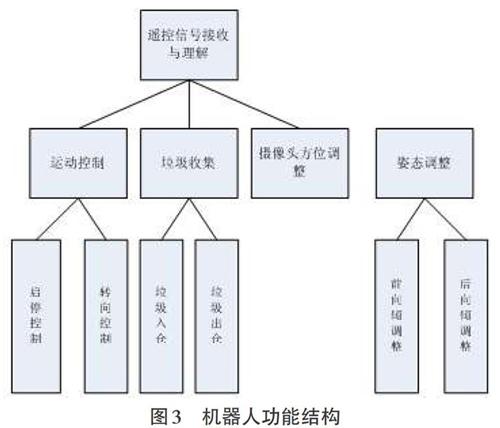
软件部分围绕水面垃圾清理机器人的主要功能进行设计,该机器人的主要功能結构如下图3所示:
在图3所示的功能结构中,姿态调整和遥控器信号接收与理解是两个相对独立的功能,姿态调整主要借助M6050陀螺仪实时监测船体受水面风浪影响造成的倾斜变化情况,由控制器自行控制电机加减速调整船体平衡。经实测,双船体结构在风浪较大时主要发生前后向倾斜,本文在该部分功能实现上主要完成前后倾斜调整。
遥控器信号接收与理解是机器人与操作者相互配合工作的重要功能,该功能的实现主要依据遥控器各个通道信号对机器人动作的定义,下表给出了遥控器相关通道与机器人动作的对应关系。
由图3给出的功能结构及表一所示的分解动作,可以看出为了让机器人在工作中保证各项动作的流畅性,需要机器人能够准确有效的理解遥控信号,并快速做出响应,为此在开发中,本文采用嵌入式实时操作系统[6]作为基础软件平台,根据图三所示的功能结构把垃圾清理机器人的各项工作划分为五个基本任务,由操作系统统一对这五个任务进行管理和调度,相互配合完成表一所示的各项动作。
其中,遥控信号的接收与理解作为系统应用层的核心任务OSSignalCapture(),该任务定时切换与遥控接收机连接的数据选择器的输入通道,完成相应通道信号的扫描,根据表一确定的协议,向相关动作对应的任务发送消息。运动控制任务OSMotionCtr()接收OSSignalCapture()发送来的消息,并根据消息内容决定机器人的前进后退,左右转向等动作,消息内容中除包含动作方向信息还包含动作大小信息,OSMotionCtr()任务根据动作大小信息调整PWM脉宽,从而达到调节动作大小的目的。
垃圾回收器是指图一所示的履带式垃圾辅助收集机构,该辅助装置一方面在机器人收集垃圾时通过向内运动使水面形成涡流,加速垃圾进入垃圾舱从而对垃圾进行“吸收”,另一方面,在机器人到岸边排放垃圾时通过向外运动把垃圾舱内的垃圾快速从垃圾舱中排出。该装置的控制由任务OSGarbCtr()负责,该任务接收来自OSSignalCapture()发给本任务的消息,并对消息进行解析,完成相关动作。
垃圾回收舱推杆的主要功能是当机器人开始回收垃圾前扩充回收舱容量,收满垃圾到岸边排出时协助将垃圾推出舱外,由于该装置的控制也由OSGarbCtr()负责。
摄像头方位调整由任务OSCamCtr()负责,该任务一样接收来自OSSignalCapture的消息。
机器人姿态调整任务OSStateJust()是一个独立的任务,该任务定时由调度器调度运行,通过读取陀螺仪的值判断自身的姿态,并通过控制机器人本体旋转方向对姿态做简单调整。
4 结束语
结合上述设计制作,通过对水面垃圾清理机器人的调试,证实了此款水面垃圾清理机器人功能结构是合理的。采用稳定的双船体结构,整个船体轻盈灵活,无须浪费大量能源,双体船可以在承受较大风浪的前提下仍能稳定工作,较大的宽度,使得各设备能够合理有效的布置。船体前端和后端均采用流线型结构,可以尽可能地减小水流阻力,减少能源的浪费。采用铁丝网手工制作的垃圾收集箱,方型结构。机器人工作时,一次性可收集最多0.01m2体积的垃圾,容量大可快速更换。加上船体前端安装有垃圾辅助收集的履带传动装置,从而方便带动垃圾进入后方收集箱内,保证了垃圾收集的效率。选用32位微处理控制器STM32F103VET6作为主控芯片,通过串口接收天地飞遥控设备发出的脉宽进行实时通信,实现了人机交互。远程无线遥控只需一位人员便可完成一系列工作,节约了劳动力、提高了效率,安装有图像传输系统,保证了远距离情况下能够精准快速地将垃圾收集。该水面垃圾清理机器人采用12V、7V 2200mA锂电池供电,节能减排,如果工作时间长可换大容量电池。通过这些特性可以看出,该机器人可以取代传统的人工清理,利用简单的机械结构便能实现理想的功能,很适合应用推广,是一款适合小型水面垃圾清理的实用型机器人。
参考文献:
[1] 李庆春,高军伟,谢广明,许恩江.基于模糊控制的仿生机器鱼避障算法[J].兵工自动化,2011(12).
[2] 梁艺鸣.电响应软体机器人及驱动模块力学研究[D].浙江大学,2018.
[3] 周林.一种新型尾鳍推进的机器鱼设计与实验研究[D].中国科学技术大学,2017.
[4] 刘火良.STM32库开发实战指南[M].机械工业出版社,2017.
[5] 李剑锋.基于STM32的航空用射频识别读卡器软件关键技术实现[D].天津大学,2012.
[6] 任哲,樊生文.嵌入式操作系统基础ucOS-Ⅱ和Linux[M].2版.北京航空航天大学出版社,2011.
