高超声速滑翔飞行器轨迹预测分析*
2019-03-14韩春耀熊家军兰旭辉
韩春耀,熊家军,张 凯,兰旭辉
(空军预警学院,武汉 430019)
0 引言
临近空间高超声速飞行器作战方式复杂、飞行空域特殊、机动样式独特,已成为改变当今世界作战规则的新型战略威胁目标。美国目前开展的几种高超声速滑翔飞行器演示项目主要有HTV-2、先进高超声速武器(AHW)、一体化高超声速(IH)项目以及“弧光”计划等[1-2]。由于高超声速滑翔飞行器采用非惯性弹道,具有高升阻比的气动外形,能在临近空间进行大范围的机动,与弹道导弹目标相比,预测其运动轨迹较为困难。然而,轨迹预测在预警探测系统交接班[3]、基于预测命中点的拦截制导[4]中具有广泛应用,研究该类目标的轨迹预测问题十分必要。
目前,关于高超声速滑翔飞行器轨迹预测的研究主要集中在制导控制领域,从防御视角研究轨迹预测的文献较少。现有关于轨迹预测的方法主要有两大类:一是数值积分法,二是曲线拟合方法。文献[5-6]研究了常升阻比条件下的轨迹预测问题,通过数值积分方法进行轨迹预测。文献[7-8]研究了飞行器最大升阻比飞行条件下的轨迹预测问题,同样采用数值积分法,认为计算飞行器的升阻比是轨迹预测的关键,且气动参数在半速度坐标系中呈线性变化。但气动参数,如升力系数、阻力系数,取值小且变化小,实验证明试图通过跟踪滤波准确辨识气动参数十分困难。文献[9]通过曲线拟合高超声速目标的加速度,再根据状态初值外推目标运动轨迹。如果飞行器规划的运动轨迹存在较大机动,采用拟合模型会有较大的预测误差。
现有轨迹预测方法主要针对某种特殊的情景,而对于机动的条件下的轨迹预测适应性较差。为此,将从运动特征、机动能力等方面分析高超声速滑翔飞行器的轨迹预测问题,分析飞行器运动的局限性、可能采取的轨迹预测方法及其可行性,为实现高超声速滑翔飞行器滑翔段的中期轨迹预测提供理论基础。
1 问题描述
1.1 轨迹预测内涵
轨迹预测是指根据目标历史运动轨迹和目标运动规律预测其未来的轨迹。从定义可以看出,轨迹预测的研究内容包含两个方面:一是目标状态估计;二是运动规律描述。状态估计是跟踪滤波的研究内容;运动规律描述是根据运动特性建立相应的预测模型。针对某个轨迹预测算法,如果没有过硬的证据支撑,那么预测结果会得到质疑。因此,寻找证据,即分析目标内在的运动规律和限制条件,十分必要。

图1 高超声速滑翔飞行器轨迹预测示意图
图1为高超声速滑翔飞行器轨迹预测示意图。高超声速滑翔飞行器的整个飞行过程包括助推段、再入变轨段、滑翔段以及下压段,考虑到轨迹预测的应用,将主要分析滑翔段的轨迹预测问题。在助推段和再入变轨段时目标距离防卫阵地较远,不便于部署防御力量;在下压段时飞行器过载高达40 g,拦截导弹相对于目标没有机动优势,因此,同样不具备拦截条件;而在滑翔段飞行器飞行时间长,拦截窗口较长,机动能力相对较弱,运动轨迹变化相对平稳,高速滑翔时目标无法采用复杂的欺骗式干扰,滑翔段是理想的拦截时机[10]。因此,将主要研究滑翔段的轨迹预测问题。
1.2 运动模型
高超声速滑翔飞行器在滑翔段主要受地球引力和气动力的作用,并通过调整攻角和倾侧角实现飞行器控制。为了描述方便,在半速度坐标系中建立运动方程,目标的质心运动方程如式(1)所示。

式(1)中,V为速度,θ为速度倾角,σ为速度方位角,r为地心至飞行器质心的距离,为经度,φ为纬度,这6个量描述飞行器的运动状态;ωe为地球自转角速度,g'r为地球引力加速度在地心距方向的分量,gωe为地心引力加速度在地球自转角速度分量,m为飞行器质量;L为总升力,D为阻力,与控制量攻角有关,υ为倾侧角,同样为控制量。气动升力和气动阻力的计算方法如式(2)所示。

式(2)中,q为动压,S为飞行器的有效面积,CLCD分别为升力系数、阻力系数,与飞行器攻角相关,ρ(h)为大气密度。数值计算涉及的飞行器参数以美国洛克希德-马丁公司设计的高超声速飞行器CAV-H为例[2]。
1.3 轨迹预测面临的问题
高超声速滑翔飞行器在临近空间飞行,飞行空域介于弹道导弹和航空飞行器的飞行空域之间,机动能力也介于两者之间,轨迹预测面临以下问题。
1)在滑翔过程中,受地球引力和气动力的共同作用,且可通过调整攻角和倾侧角实现机动。由于受力情况复杂,与弹道导弹目标不同,不能够根据关机点确定完整弹道,高超声速滑翔飞行器轨迹预测缺乏理论依据。
2)无论是预警探测系统的交接班,还是基于预测命中点的拦截制导,都需要中长时间的轨迹预测。考虑到飞行器的机动能力,能否实现较长时间的轨迹预测需要定量研究。
轨迹预测分析主要在受力分析的基础上采用数值计算方法,分析高超声速滑翔飞行器运动特性以及轨迹预测的可行性。
2 轨迹预测分析
2.1 运动轨迹特性
高超声速滑翔飞行器有两种弹道形式:一是钱学森弹道,采用几乎没有波动的平坦滑翔下降弹道,称为再入平坦滑翔弹道,也称为平衡滑翔弹道;二是Sanger弹道(桑格尔弹道),采用一种具有一定跳跃、波动幅度逐渐减小的滑翔轨迹[11],也称为再入跳跃滑翔弹道。
平衡滑翔是指在飞行过程中,纵向平面内飞行器在垂直方向受到的作用力处于平衡状态[12]。平衡滑翔时,认为速度倾角的变化率为零并且速度倾角是一个小量,即 dθ/dt=0,cos≈1,平衡滑翔条件一般用式(3)表示:

针对某一特定的飞行器,飞行器质量基本不变,如果升力系数保持不变,倾侧角υ为0,即飞行器在纵向平面内飞行,则满足平衡滑翔条件时,飞行速度与高度存在固定关系,如式(4)所示。

以CAV-H为例,计算平衡滑翔时速度与高度的关系,假设飞行器攻角恒为15°,即升力系数、升阻比保持不变。速度与高度的关系如图2所示。对于某一高超声速滑翔飞行器,在气动系数保持不变的条件下,为保持平衡滑翔状态,飞行器高度越高,所需的速度越高;当飞行高度为80 km时,速度接近7.9 km/s,即第一宇宙速度。

图2 平衡滑翔时速度与高度的关系
跳跃滑翔轨迹是由于飞行器在纵平面内不满足平衡滑翔条件。跳跃滑翔时,无法像平衡滑翔时那样推导出变量之间的关系式。与平衡滑翔相比,跳跃滑翔轨迹高度随时间的变化,呈现振幅逐渐降低的震荡曲线特征,跳跃周期随时间推移而减小,其对应的纵向平面内垂直方向的加速度也具有周期变化的特征。上述运动轨迹的特征可以运用到轨迹预测算法的设计中。
2.2 机动模式分析
为了增强飞行器的突防能力,进攻方通常规划多种突防弹道。文献[13-14]设计了多种突防模式,如单S机动、半圆机动、侧向蛇形机动、纵向蛇形机动等。将运动轨迹投影到二维平面内,不同的突防模式具有各自的几何特征。在纵向平面内,平衡滑翔与跳跃滑翔飞行高度随时间的变化,具有截然不同的几何特征;在侧向平面内,转弯机动和蛇形机动的几何特征也有较大差异。因此,基于运动轨迹的几何特征解决轨迹预测问题是一种重要处理思路。
以纵向蛇形机动时的高度预测为例,分析运动轨迹可能的几何描述方法。根据数值拟合理论可知,任何一条震荡的曲线均可由多个正弦曲线和直线的组合近似。高度随时间的变化可由公式描述。

式(5)中,h0i(t)为跳跃机动轨迹的基准高度,Ai为机动幅值,ωi(t)为机动频率,φi为初始相位,x(t)为射程。其物理含义是将机动轨迹描述为机动幅度、机动频率等参数表示的函数。
在轨迹预测应用中,根据前期大量的观测数据分析目标运动轨迹的几何特征,建立运动轨迹几何曲线与参数化函数之间的关系,用正交多项式或三角函数等基函数拟合运动轨迹,采用频谱分析方法剖析轨迹的频谱特征,并与正交多项式或三角函数频谱特征进行比较,从而确定拟合函数的类型和阶次。
2.3 转弯半径分析
高超声速滑翔飞行器通常采用BTT倾斜转弯技术进行横向机动,通过倾斜弹体,升力分力提供向心力,转弯较慢。同时飞行器还应满足过载约束,过载约束既要保证飞行器的机动性,又要防止过载偏大引起弹上设备、机体结构的破坏。
飞行器气动力过载是指飞行器所受气动力与重力的比。气动力在半速度坐标系中可以分解为升力、侧力以及阻力,在飞行器坐标系中可以分解为法向力、横向力以及轴向力,可根据气动力在不同坐标系中的分解方法去定义相应的过载。认为侧力提供飞行器转弯的向心力,气动力在半速度坐标系中的分解为:

式(6)中,X为阻力,也记作D,Y为升力,Z为侧力,升力和侧力的合力为总升力,记作L。
侧向过载约束可以描述为:

向心加速度为:

将总升力的计算公式代入向心加速度,进而得到转弯半径的计算公式为:

从式(9)中可以得出,高超声速无动力滑翔飞行器的转弯半径与攻角、倾侧角和高度密切相关。转弯半径与倾侧角、攻角反相关,即倾侧角越大,侧力(向心力)就会越大,转弯半径就会越小;由于升力系数的大小与攻角成正比,攻角越大,随着攻角增大升力也会增大,在相同倾侧角条件下提供的侧力(向心力)也越大,因此,转弯半径就会越小。同时,转弯半径与飞行高度正相关,即飞行高度越高,空气越稀薄,空气密度就更低,侧力(向心力)就会越小,转弯就会更加平缓,也就是转弯半径就会越大。需要特别强调的是,转弯半径随与飞行器速度无关,但速度要保持在能够使飞行器实施滑翔的范围内。
为了验证高超声速滑翔飞行器的最小机动半径的理论分析,设计仿真实验。仿真条件设置如下:飞行器仍然采用CAV-H模型,攻角取值为5°~20°,倾侧角取值为 10°~60°,高度为 20 km~60 km,大气模型采用拟合模型,分别计算不同条件下飞行器的转弯半径。图3、图4为转弯半径仿真实验结果。
图3是假设飞行高度为30 km时,转弯半径随倾侧角的变化情况。相同攻角条件下,转弯半径随倾侧角的增大而减小;相同倾侧角条件下,转弯半径随攻角的增大而减小。图4是假设攻角为15°时,转弯半径随倾侧角的变化情况。

图3 高度为30 km时转弯半径随倾侧角的变化

图4 攻角为15°时转弯半径随倾侧角的变化
表1为典型条件下转弯半径的变化规律,飞行器攻角为15°倾侧角为45°时大气密度、转弯半径与高度的关系。大气密度随高度增加成指数下降,以高度20 km的大气密度为基准,高度10 km的大气密度是其4.8倍,高度50 km的大气密度只有基准密度的百分之一;转弯半径随高度增加急剧增加,高度为20 km时转弯半径为111 km,而高度为60 km时转弯半径为31 037 km。
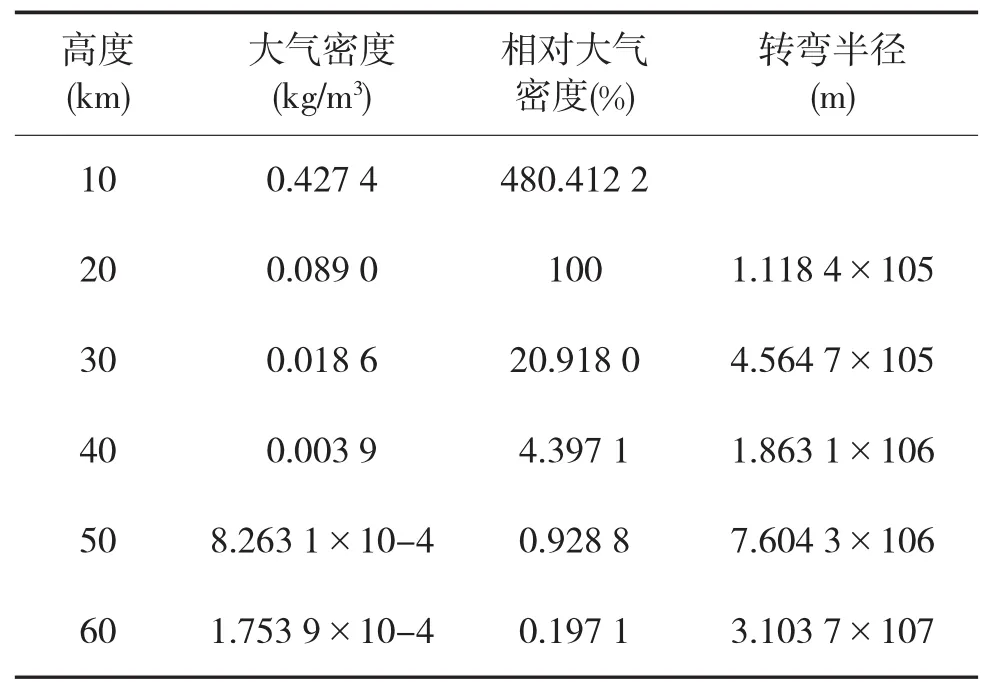
表1 转弯半径分析
总体而言,转弯半径相对比较大,横向机动能力比较弱,也就是说运动轨迹相对比较平直,这一特性对于防御方进行轨迹预测是非常有利的。横向位移可以建模为低阶的多项式模型,即可实现较高精度的轨迹预测。
2.4 最大射程分析
飞行器的射程越远打击范围就越广,对防御方来讲,意味着威胁就更大,高超声速滑翔飞行器的最大射程是轨迹预测的一个重点研究内容。
影响高超声速滑翔飞行器最大射程的主要因素有初始速度、初始高度、升阻比、初始弹道倾角。以CAV-H为例,分析初始速度、初始高度、升阻比以及初始速度倾角4个因素对射程的影响。标准初始状态设置为:初始速度为6 000 m/s,初始高度为65 km,初始速度倾角为0°,攻角恒定为15°,飞行终止条件为飞行高度小于20 km。升力系数、阻力系数、升阻比主要取决于飞行器的攻角,根据飞行器的气动数据,拟合攻角与气动力参数的关系。射程通过对飞行器运动方程数值积分计算射程,理论上可以选择滑翔段上任意一点作为初始时刻。仿真过程中,不考虑热流密度、过载和动压等过程约束的影响。
2.4.1 初始速度对射程的影响
为了分析初始速度对飞行器射程的影响,计算不同初始速度条件下的运动轨迹,初始速度为5 500 m/s、6 000 m/s、6 500 m/s。通过计算,当攻角为15°时,升阻比的大小为2.893 9。不同初始速度条件下,飞行高度关于射程的曲线如图5所示,射程随初始速度的增加而大幅增加,随着时间推移跳跃幅度逐渐收窄。

图5 初始速度对射程的影响
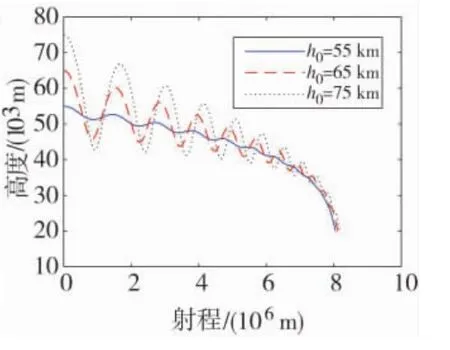
图6 初始高度对射程的影响
2.4.2 初始高度对射程的影响
假设初始高度分别设置为55 km、65 km、75 km,仿真计算不同初始高度条件的运动轨迹。图6为不同初始高度条件下飞行器的运动轨迹。不同初始高度条件下飞行器的射程基本相同,高度为75 km时,偏离平衡滑翔状态程度更大,轨迹跳跃幅度也更大。
2.4.3 升阻比对射程的影响
升阻比主要取决于飞行器的攻角,即通过对比不同攻角对升阻比的影响来体现升阻比对射程的影响。假设攻角恒定为 5°、10°、15°、20°,对应的升阻比分别为 1.486 8、2.884 1、2.893 9、2.554 2,仿真计算不同初始升阻比条件的运动轨迹。图7为升阻比对射程的影响,可见飞行器的射程和飞行时间与升阻比成正比,当升阻比为1.486 8时射程仅为4 000 km,而当升阻比为2.893 9时射程增加一倍,达到8 000 km。并且当攻角为10°、15°时升阻比相差不大,射程基本相同。

图7 升阻比对射程的影响

图8 初始速度倾角对射程的影响
2.4.4 初始速度倾角对射程的影响
假设初始速度倾角为 -5°、0°、5°,仿真计算不同初始速度倾角条件的运动轨迹。仿真结果如图8所示,可知适当增大初始速度倾角可以增加射程,但要保证飞行器在临近空间飞行,当初始速度倾角过大时,飞行器就会进入太空,飞行轨迹类似弹道导弹,此时射程将大幅减小。
高超声速滑翔飞行器最大射程与升阻比、初始速度、初始速度倾角正相关,其中升阻比能够显著提高射程。在预测滑翔段运动轨迹时,假设飞行器保持常攻角或者保持最大升阻比是合理的。
2.5 可达区域分析
高超声速滑翔飞行器采用大升阻比气动外形,能够实现大范围内机动,飞行器在地球表面可能到达的落点的集合称为可达区域。可达区域是横向机动能力与纵向机动能力的综合反映,对于轨迹预测时间分析具有重要意义。可达区域计算主要有两类方法:一是常值倾侧角方法;二是轨迹优化算法。
常值倾侧角方法假定飞行器飞行过程中倾侧角保持不变,通过数值积分外推轨迹,遍历倾侧角取值,则可获得可达区域的边界,选取最大的横程作为最大横向机动距离。常值倾侧角方法计算量小,运算速度快。
高超声速滑翔飞行器还受热流密度、动压、过载以及控制裕度等条件的约束,计算最大横向机动距离本质上可看作是以最大横程为优化目标的控制量参数优化问题[15-18]。
文献[19]讨论了常值倾侧角方法和轨迹优化方法两种升力式飞行器可达区域的计算方法,认为常值倾侧角方法与轨迹优化方法的结果类似。
利用常值倾侧角方法仿真高超声速滑翔飞行器的机动距离。以CAV-H为例,计算不同倾侧角条件下的机动距离。仿真假设条件为:初始高度65 km,初始速度6 000 m/s,初始速度倾角0°,攻角恒为15°,倾侧角分别为 0°、15°、30°、45°,数值积分的终止条件为飞行高度小于20 km。横向机动距离用横程表示,纵向机动距离用纵程表示。
不同倾侧角条件下横程变化如图9所示。相同初始条件下,横程随时间的而增大;当倾侧角为0°时,横程始终为0;同时,存在使横程最大的倾侧角,当倾侧角过大时终点横程反而会减小,倾侧角为30°时的横程比倾侧角为45°时的横程要大。
不同倾侧角条件下的纵程变化如图10所示。可见,倾侧角越大飞行时间越短;纵程随倾侧角的增加而减小。倾侧角越大,升力在纵向平面内的分力越小,在纵向平面内等效的升阻比相应减小,因此,滑翔飞行时间缩短,纵程也减小,这与提高升阻比能够增大射程的结论是相符合的。
仿真条件不变,图11为利用常值倾侧角方法计算的高超声速滑翔飞行器可达区域,近似扇形。以终点状态计算的可达区域范围大,对防御方的预警探测体系而言更多的是一种理论指导意义,难以形成作战应用价值。如果不以落点作为结束条件,缩短轨迹预测的时间区间,重点关注飞行器某一时段的运动路径,也就是说将计算运动管道作为轨迹预测的目标,则可达区域范围将与实际轨迹更加接近,也更具战术意义。

图9 不同倾侧角下横程随时间变化
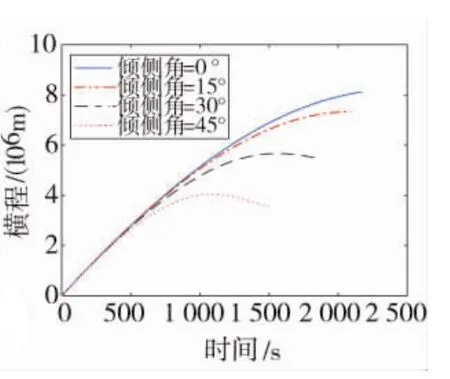
图10 不同倾侧角下纵程随时间变化
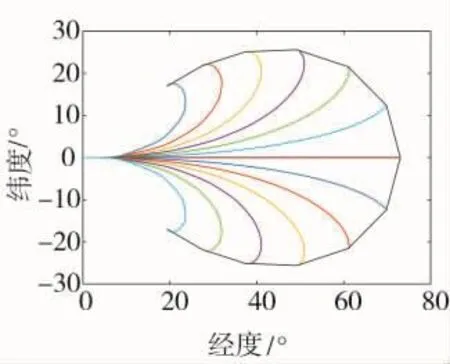
图11 高超声速滑翔飞行器可达区域
3 结论
在预警探测和拦截制导过程中,需要预测飞行器轨迹,达到为接班探测器提供指示信息和预测拦截弹命中点的目的。从运动轨迹特性、机动模式、转弯半径、最大射程以及最大横向机动距离5个方面分析了轨迹的可预测性,为高超声速滑翔飞行器的轨迹预测提供了理论依据。结论主要有:
1)拟平衡滑翔和跳跃滑翔是高超声速滑翔飞行器在滑翔段的两种基本运动轨迹形式。平衡滑翔时能够获得轨迹的解析形式;跳跃滑翔时轨迹呈现振幅逐渐降低的震荡曲线特征。
2)高超声速滑翔飞行器采用多种机动模式提高突防能力,运动轨迹具有显著的几何特征。
3)高超声速滑翔飞行器的转弯半径与攻角、倾侧角以及飞行高度有关,并且仅依靠气动力提供的向心力转弯半径大,横向机动能力弱。
4)高超声速滑翔飞行器的射程与初始速度、初始高度、初始速度倾角以及升阻比相关,其中升阻比能够显著提高射程,为使飞行器实现最大射程应保持较大升阻比。
5)高超声速滑翔飞行器可达区域大,难以实现全程轨迹预测。
