2019新款捷豹路虎极光新技术介绍(三)
2019-03-13北京王继东
◆文/北京 王继东
(接上期)
三、动力传动系统(四轮驱动系统AWD)
1.概述
新极光有多种传动系统选项可用:①配备第2代标准传动系统的四轮驱动(AWD);②配备第2代主动传动系统的AWD。
传动系统新技术包括:①更新型动力传递单元(PTU);②具备传动系统断开功能的第2代标准传动系统;③适用于标准和主动传动系统的全新后驱动单元(RDU)。
2.配备第2代标准传动系统的AWD
新极光现在采用了第2代标准传动系统,该系统适用于200马力(1马力=0.7354987kW),249马力汽油发动机的动力总成系统。配备第2代标准传动系统的车辆使用传统机械差速器,用于将前后扭矩输出到半轴。前差速器位于自动变速器内,后差速器位于RDU内。
第2代标准传动系统部件如图22所示。第2代标准传动系统包括:①前差速器;②PTU;③两件式传动轴(整件更换,不可分开);④带单离合器组件的RDU。
第2代标准传动系统配有一个PTU,它连接至变速器,用于以机械方式断开和重新连接供应至传动轴的驱动力。这就实现了传动系统断开功能,本节的后面将会详述这一功能。PTU是一个通用部件,可与第2代主动传动系统共用。在AWD模式下,第2代标准传动系统将会利用RDU中的湿式多片式离合器组件持续改变前/后扭矩分配。前差速器和PTU由变速器的输出轴驱动。然后通过两件式传动轴,将扭矩传输至RDU。接下来,传动轴驱动RDU中的后差速器,后差速器然后通过离合器组件将扭矩传输至后轮。
3.配备第2代主动传动系统的AWD
第2代主动传动系统仅适用于300马力汽油发动机。配备第2代主动传动系统的车辆的传动系统布局与配备第2代标准传动系统的车辆基本相同,不同之处在于带双多片式离合器组件的RDU的安装。前差速器位于自动变速器内。PTU是一个通用部件,可与第2代标准传动系统共用。第2代主动传动系统RDU没有差速器,至左右侧后轮的动力传输由单个离合器组件控制。
第2代主动传动系统部件如图23所示。第2代主动传动系统包括:
①前差速器;②PTU;③两件式传动轴(整件更换,不可分开);④带双离合器组件的RDU。

图22 第2代标准传动系统部件
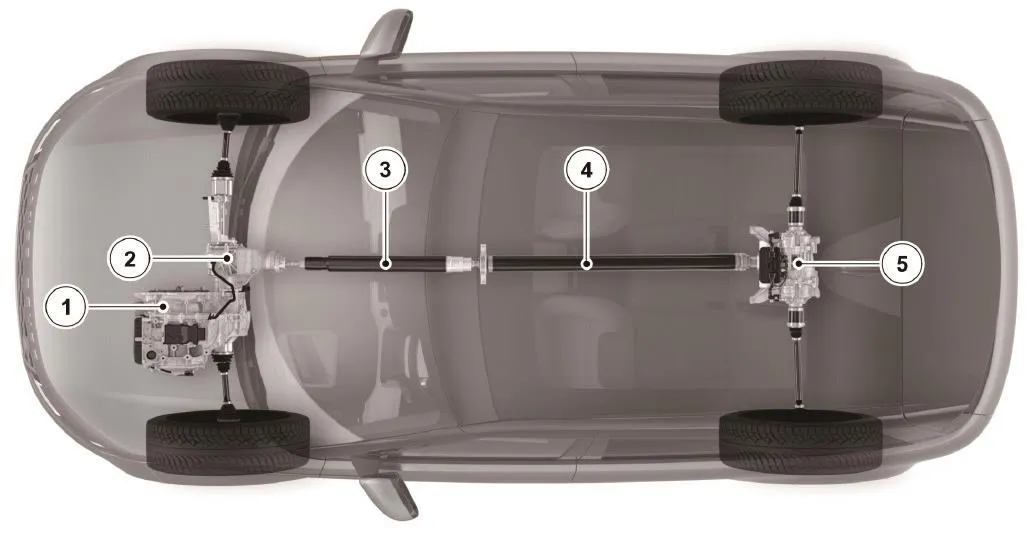
图23 第2代主动传动系统部件
在AWD模式下,第2代主动传动系统利用RDU中的离合器组件持续改变前/后扭矩分配以及后轮的左/右扭矩平衡。前差速器和PTU由变速器的输出轴驱动。然后通过两件式传动轴,扭矩将被传输至RDU。接下来,传动轴驱动与RDU中的托架相连的冠状齿轮,该托架连接了两个独立的湿式多片式离合器组件,每个后轮使用一个组件。离合器组件独立地将驱动力传输至每个后轮。
4.传动系统断开系统
传动系统断开系统是一个电动机械系统,能够完全接合和分离传输至传动轴的驱动力,因而也能完全接合和分离传输至后轮的扭矩。该系统提高了燃油经济性并增强了车辆的公路/越野行驶操控性和驾驶性能。
若要启用传动系统断开系统,需要使用以下部件:
①PTU;②RDU;③AWD控制模块(AWDCM);④AWDB控制模块(AWDBCM)-仅限第2代主动传动系统;⑤传动系统断开控制模块(DDCM)。
当符合相关条件时,PTU以机械方式断开传输至传动轴和RDU的驱动力。此外,RDU中的离合器组件将会分离以进一步减少传动系统阻力。
若要重新接合AWD系统:①对RDU离合器施加高达50N·m的闭合扭矩以提高传动轴的转速;②当传动轴转速与前轴转速相匹配时,RDU离合器将会移回咬合点;③然后,PTU爪形离合器将会接合,RDU离合器的扭矩将会升高至所需的后轴扭矩。
当需要使用AWD时,PTU爪形离合器将会闭合,并且:
①在第2代标准传动系统中,RDU中的离合器组件将会通过机械开放式差速器控制两个后轮的扭矩分配。
②在第2代主动传动系统中,RDU中的离合器组件将会控制单个后轮的扭矩分配。
传动系统连接正时:
①150ms-RDU离合器达到同步扭矩;
②350ms-PTU到达已连接位置;
③450ms-RDU离合器向后轴应用请求的扭矩。
传动系统断开系统先决条件:在全地形反馈适应系统设置为“舒适”或“Eco”的情况下,如果在以下情况下驾驶车辆,则传动系统将会断开:
①从静止加速到15km/h。
②以超过15km/h的恒定速度行驶5s。
注意:如果车速降到5km/h以下,则传动系统将自动重新连接。
在以下情况下,传动系统将保持连接或重新连接:
①关闭了DSC(客户手动关闭或由于ABS模块中存在故障而关闭);
②环境温度低(低于-10℃);
③发动机扭矩需求高;
④选择了“动态”、“沙地”或“泥泞地面/车辙地”全地形反馈适应系统模式;
⑤检测到车轮打滑;
⑥检测到高横向加速度/偏航力矩;
⑦检测到路面不平;
⑧选择倒车挡。
如果存在与AWD系统操作有关的DTC,则传动系统将会断开并进入2轮驱动状态。
全地形反馈适应系统不同模式下的传动系统断开功能如表4。

表4 全地形反馈适应系统不同模式下的传动系统断开功能
5.动力传递单元(PTU)
动力传递单元(PTU)如图24所示,内部部件如图25所示,部件分解图如图26所示。在旋转凸轮环和驱动电机的驱动下,PTU通过爪形离合器机构以机械方式连接/断开供应至传动轴和RDU的驱动力。随着凸轮环旋转,凸轮环上的斜面作用在弹簧加载式爪形离合器的斜面上,从而分离从变速器传输至RDU的驱动力。在斜面顶部,在电机没有承受持续加载的情况下,一个平坦部分允许爪形离合器保持在分离状态。所以,如果在爪形离合器打开时PTU电机发生故障,则传动系统将会陷入永久性FWD状态。PTU由DDCM控制。传动系统连接/断开策略由AWDCM控制,它会持续监测主要的车辆和环境参数。当达到传动系统断开条件时,AWDCM会指示DDCM断开PTU。当需要使用AWD时,AWDCM会指示DDCM重新连接PTU。PTU由DDCM控制。传动系统连接/断开策略由AWDCM控制,它会持续监测主要的车辆和环境参数。当达到传动系统断开条件时,AWDCM会指示DDCM断开PTU。当需要使用AWD时,AWDCM会指示DDCM重新连接PTU。PTU电机是可更换的。更换后无需执行校准例行程序。

图24 动力传递单元(PTU)

图25 PTU内部部件

图26 PTU部件分解图
6.后驱动单元(RDU)
RDU负责传输和断开供应至后半轴的驱动力。有两种版本可用:①第2代标准传动系统-单离合器组件;②第2代主动传动系统-双离合器组件。
两种版本均采用了无需保养的“终生不用换油”设计。
第2代标准传动系统RDU如图27所示,内部部件如图28所示。配备第2代标准传动系统的车辆有一个传统的机械后差速器,其差速器壳体上装有一个集成的离合器组件。从传动轴至RDU的驱动力通过输入法兰传输至小齿轮上,该小齿轮然后驱动安装在开放式差速器上的冠状齿轮。离合器组件安装在差速器壳体的左侧。离合器组件的一半以物理方式连接至差速器中的左太阳齿轮。离合器组件的另一半有一个供左后半轴使用的花键输出装置。右太阳齿轮也有一个供右后半轴使用的花键输出装置。一个三相电动驱动电机将会旋转凸轮环,而凸轮环将会旋转离合器组件内的滚珠斜面机构。这就会将可变扭矩施加到离合器组件上,离合器组件进而改变传输至后轮的扭矩量。随着驱动电机旋转凸轮环并将扭矩传输至离合器组件,差速器能够正常工作,将驱动力传输至后轮。当传动系统断开系统工作时,离合器组件完全打开,从而与PTU中打开的爪形离合器一起减少传动系统阻力。
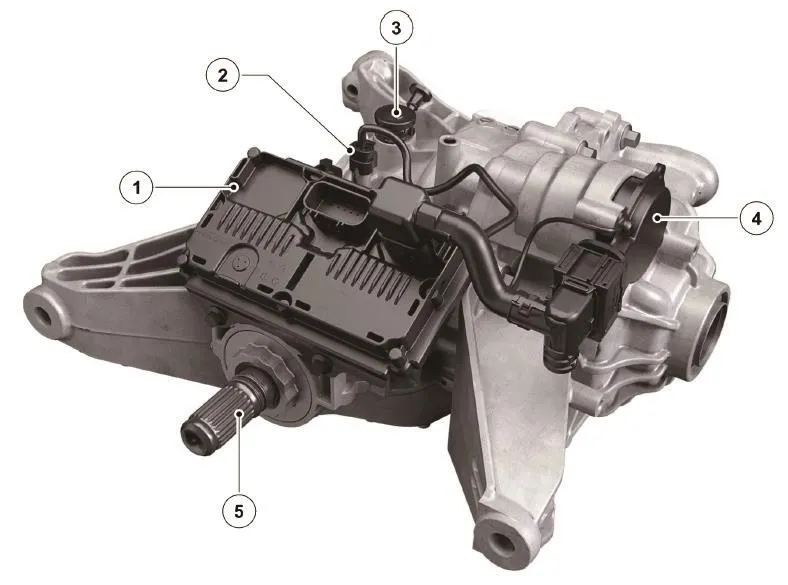
图27 第2代标准传动系统RDU

1.冠状齿轮;2.左RDU离合器驱动电机;3.左离合器组件;4.来自传动轴的输入;5.小齿轮;6.差速器。
7.第2代主动传动系统RDU
第2代主动传动系统RDU如图29所示,内部部件如图30所示。第2代主动传动系统中的RDU没有差速器。每个半轴都通过独立的离合器组件驱动,其工作方式与在标准传动系统RDU中的方式相同。来自传动轴的驱动力通过输入法兰传输至小齿轮和冠状齿轮,这些齿轮然后驱动安装了每个离合器组件的托架。每个离合器组件的一半都安装在托架上。另一半有一个供对应半轴使用的花键输出装置。一个三相电动驱动电机将会旋转凸轮环,以便旋转每个离合器组件内的滚珠斜面机构。这就会将可变扭矩施加到每个离合器组件上,离合器组件进而改变传输至每个后轮的扭矩量。当传动系统断开系统工作时,离合器组件完全打开,从而与PTU中打开的爪形离合器一起减少传动系统阻力。RDU电机是可更换的,在更换后需要执行校准例行程序。从AWDCM/B至RDU电机的接线线束也是可更换的。
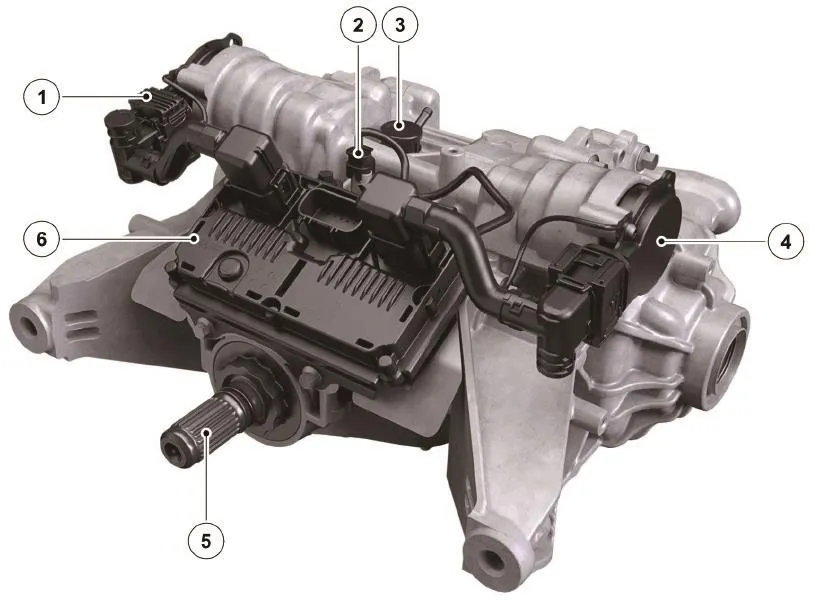
图29 第2代主动传动系统RDU
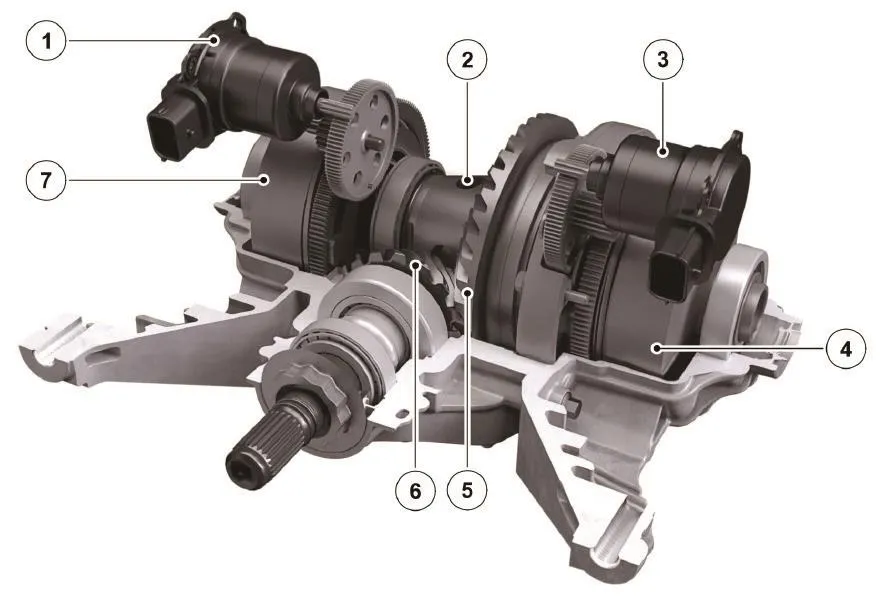
图30 第2代主动传动系统RDU内部部件
8.传动系统控制
全轮驱动(AWD)控制模块(AWDCM)负责传动系统高级控制策略,包括扭矩传递和断开策略。AWDCM如图31所示,AWDCM控制RDU和PTU(通过DDCM),并且位于RDU的前上部。AWD系统控制框图如图32所示。AWDCM通过FlexRay连接至车辆上的其他模块。有两种版本的AWDCM可用,它们共用一个类似的壳体:
①第2代标准传动系统-AWDCM;
②第2代主动传动系统-带AWDBCM的AWDCM。
注意:AWDCM和AWDBCM是两个独立的控制模块。但是,AWDBCM与AWDCM位于同一个壳体内。对于配备第2代主动传动系统的车辆,当使用JLR认可的诊断设备时,设备上会同时显示AWDCM和AWDBCM。
在第2代主动传动系统中存在相同的左驱动电机和霍尔传感器,它们均由AWDCM控制,但是AWDBCM控制用于驱动右离合器执行器环的驱动电机。与AWDCM一样,驱动电机中的霍尔传感器直接监测电机的位置以确定所需的离合器耦合扭矩。
两个版本都通过RJB中由BCM控制的继电器提供电源。此外,在第2代标准传动系统和第2代主动传动系统中,AWDCM还监测传动轴转速传感器。传动轴转速传感器位于RDU的前上部,也就是AWDCM/B的正后方。传动轴转速传感器属于霍尔型传感器,可以单独更换,并且更换后无需执行校准例行程序。
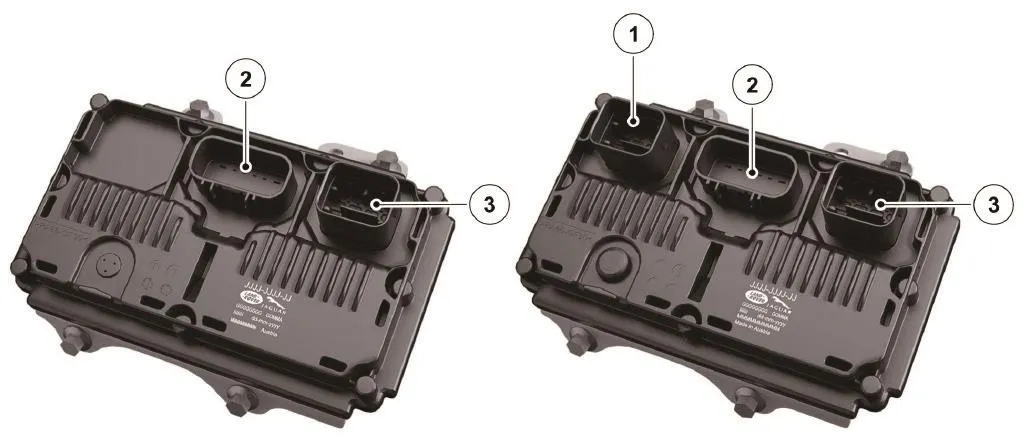
图31 全轮驱动(AWD)控制模块(AWDCM)
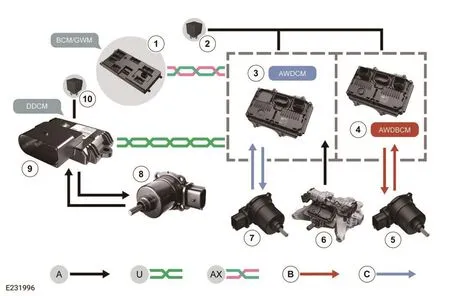
图32 AWD系统控制框图
传动系统断开控制模块(DDCM)如图33所示,PTU由DDCM控制。DDCM控制一个三相电机,该电机用于驱动爪形离合器执行器环以连接/断开PTU。电机中的霍尔传感器用于监测驱动电机的位置。DDCM是一个从属单元,由AWDCM通过专用AWDCAN总线进行控制。DDCM通过EJB中由BCM控制的继电器接收电源。

图33 传动系统断开控制模块(DDCM)
(未完待续)