基于模型预测控制的某救助船减摇鳍控制系统的仿真研究
2019-03-12徐硕
徐硕
摘 要:为更好地对减摇鳍进行控制,该文创造性地将模型预测控制引入减摇鳍控制系统中,并以“南海救118”轮减摇鳍控制系统为例,通过仿真研究,将PID控制和模型预测控制进行对照,得出模型预测控制效果要好于PID控制,从理论上对减摇鳍的设计进行指导。
关键词:救助船 减摇鳍 模型预测控制
1.引言
救助船往往都是在急难险重的情况下出动,在风浪中会有较大摇晃,为了保存救助人员的体能和精力,保障船舶设备特別是特种设备的安全性和可靠性,需要在船上安装有减摇鳍来减小船舶的横摇、纵摇等各种运动,其中,横摇是比较剧烈的一种运动,本文接下来的模型处理也只针对横摇运动。传统的减摇鳍控制系统主要采用PID控制,即接收陀螺仪和综合模块中的信号经过比例电路、积分电路、微分电路等对该信号进行处理,这种处理方式比较简单,而海上波浪变化万千,具有很强的随机性和非线性,为使得减摇控制更加高效,我们需要一种新的控制算法来优化控制性能。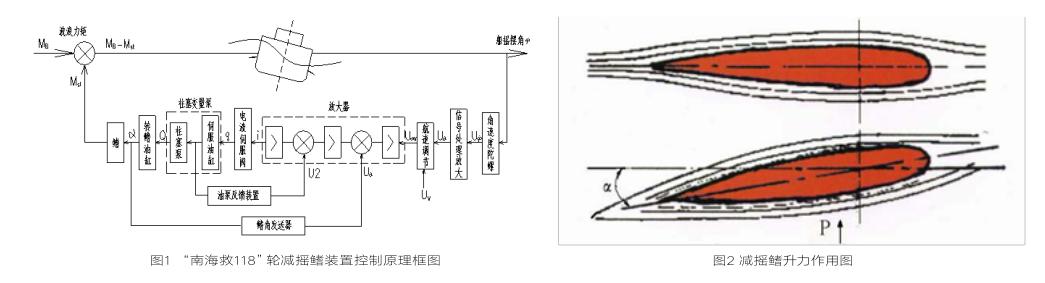
2.模型预测控制简介
模型预测控制是一种现代的先进控制算法,它克服了PID控制简单的反馈控制调节及单回路控制,可以从系统的角度进行全局控制,在确定了系统的预测模型后,在预测时域内对系统的动态进行预测,在每一个采样时刻进行优化,将优化解作用于系统,循环滚动进行,在线实时反馈。对于像船舶减摇鳍这种需要时时刻刻跟随波浪的变化进行动作的系统来说,模型预测控制是一种非常好的控制算法。

4.船舶减摇鳍系统仿真分析
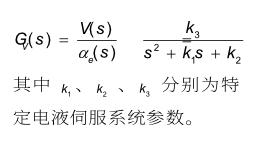
本文根据以上船舶横摇、减摇鳍模型及“南海救118”轮的相应参数运用MATLAB/Simulink软件进行仿真。仿真过程中,海浪模拟信号采用高斯噪声叠加正弦波为扰动信号,波浪扰动信号如图3所示。
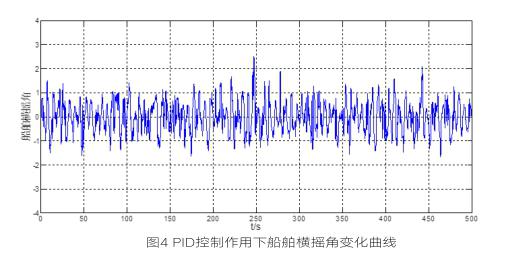
在仿真过程中使用PID控制器进行控制得到的船舶横摇角变化如图4所示:
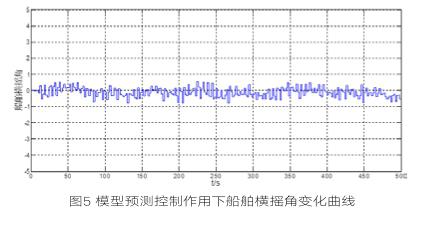
在这里,我们将上面PID控制中的传递函数通过计算转化为状态空间方程,运用MATLAB/Simulink工具进行仿真,运行后得到的船舶横摇角变化如图5所示。
通过对比上面的仿真响应曲线,我们可以明显地看到模型预测控制在减摇鳍控制中要远远优越于传统的PID控制,展现了较强的控制性能。
5.结束语
减摇鳍的控制需要较好的跟踪响应,模型预测控制所具有的滚动优化和前馈-反馈控制的结构特点可以帮助我们实现这一点。根据其控制原理,它可以在线实时优化,并且在优化问题中有针对波浪的变化进行的前馈补偿,还有基于船舶横摇角变化的反馈补偿。通过上面的仿真分析,证明了模型预测控制能够较好实现减摇效果,希望本文能够对减摇鳍设计及生产方在系统控制方面利用模型预测控制算法有所启发。
参考文献:
[[1]席裕庚.预测控制[M].北京:国防工业出版社,2013.
[2]王琳.非收放式减摇鳍控制系统的设计[D].大连:大连海事大学,2016.
[3]杨波.基于海浪谱的减摇鳍控制系统研究[D].哈尔滨:哈尔滨工程大学,2011.
[4]罗德红.BP神经网络应用于船舶减摇鳍控制系统的仿真研究[J].电气自动化,2011(2),25-27.
[5]于艳博.船舶横摇运动建模与控制仿真研究[D]. 大连:大连海事大学,2014.
