应用于电动汽车复合储能系统的升压型直流变换器控制策略
2019-03-11聂金泉吴华伟童晓辉任晔路
聂金泉,吴华伟,邝 勇,童晓辉,任晔路
应用于电动汽车复合储能系统的升压型直流变换器控制策略
聂金泉1,2,吴华伟1,2,邝 勇3,童晓辉3,任晔路3
(1湖北文理学院纯电动汽车动力系统设计与测试湖北省重点实验室,湖北 襄阳 441053;2湖北文理学院汽车与交通工程学院,湖北 襄阳 441053;3东风襄阳旅行车有限公司,湖北 襄阳 441000)
升压型直流变换器采用滑模变结构控制策略存在收敛速度较慢、抖振剧烈等导致的动态响应品质差问题。本文提出一种双幂次滑模趋近滞环控制策略,在电流跟踪误差估计值的基础上定义滑模面以实现电流跟踪控制,依据系统的未知扰动和负载变化建立自适应状态观测器,结合李雅普诺夫函数设计自适应律,并计算自适应占空比。提出一种双幂次趋近律,根据系统不同趋近过程的特点制定参数选择标准,对系统的动态响应品质进行目的性调节,并设计滑模滞环控制器以削弱由符号函数项所引起的抖振。对以上方法进行了仿真验证,结果显示可有效改善系统的动态特性和电流控制鲁棒性。
升压型直流变换器;双幂次趋近律;滑模控制;自适应观测器;滞环控制器
复合储能系统综合电池和超级电容的高比能、高比功率特性,可有效提升系统中电池的使用寿命,获得了广泛的关注[1]。升压型直流变换器广泛应用于要求输出电压高于输入电压的工程中,在复合储能系统中也得到了大量的应用。然而,开关特性使升压型直流变换器具有非线性,实际工作中输入电压、负载和系统参数变化等不确定性扰动随时可能发生,对系统稳定性造成威胁。因此,寻找一种针对该非线性系统在任意工况下抗扰动且快速收敛的控制策略尤为重要[2]。
滑模控制具有鲁棒性强、快速响应、对参数变化及扰动不灵敏等特点,已被广泛应用于直流变换器稳定性控制和工作模式切换等实际工程问题 中[2-4]。其主要缺点在于系统的不连续开关特性引起不可避免的抖振现象,抖振不仅影响控制精确性,增加能量消耗,而且易激发系统的未建模特性,使其产生振荡或失稳,损坏控制器部件。此外,滑模控制仅在滑模运动阶段对系统的不确定性和扰动具有不变性,因此,如何在减少滑模趋近时间的同时消除滑模运动阶段的抖振仍是目前研究的热点问题之一[5-6]。
国内外学者采用边界层法[7]、滤波法[8]以及趋近律法[9-10]等来削弱抖振。边界层法不能使状态收敛到滑模;滤波法存在稳定性分析的难点;基于趋近律的滑模控制可以有效改善趋近运动的动态品质,自提出以来便受到广泛关注[7-12]。常用的3种趋近律中,等速趋近律的趋近速度恒定,指数趋近律虽然加快了系统远离滑模面时的趋近速度,但这两种趋近律都不能从理论上消除抖振,单幂次趋近律可以平滑地进入滑动模态而削弱抖振,但在远离滑模面时存在趋近速度过小的问题[11]。上述常用趋近律的可调参数较少,在控制过程中仍然存在抖振及收敛速度有待提升的问题[12-13]。
外界干扰及不确定项是滑模控制中抖振的又一主要来源,对直流变换器而言,输入电压变化、负载变化以及系统参数变化等不确定因素均会对系统造成干扰,影响控制效果[14]。文献[15]设计了一种自适应滑模观测器对外界干扰和不确定性进行估计并加以补偿调整,达到削弱抖振的目的。直接对控制量进行滞环控制可以降低系统模式切换频率而减小抖振[3],但抖振削弱效果仍有待提升。
综上,本文提出一种升压型直流变换器的双幂次滑模趋近滞环控制策略。考虑电池内阻变化所引起的输入电压不稳定,以及负载变化所引起的系统扰动,建立自适应观测器,结合李雅普诺夫函数设计自适应律。提出一种双幂次趋近律,根据系统不同趋近过程的特点制定参数选择标准,从而对系统的动态响应品质进行目的性调节。设计滑模滞环控制器以削弱由符号函数项所引起的抖振。与指数趋近律相比,验证了双幂次滑模趋近滞环控制策略在系统启动阶段和负载突变情况下,在调节时间、抗干扰和电流鲁棒性控制等方面的优越性。
1 升压型直流变换器模型
升压型直流变换器的等效电路如图1所示。其理想状态模型见式(1)~(2)[16]


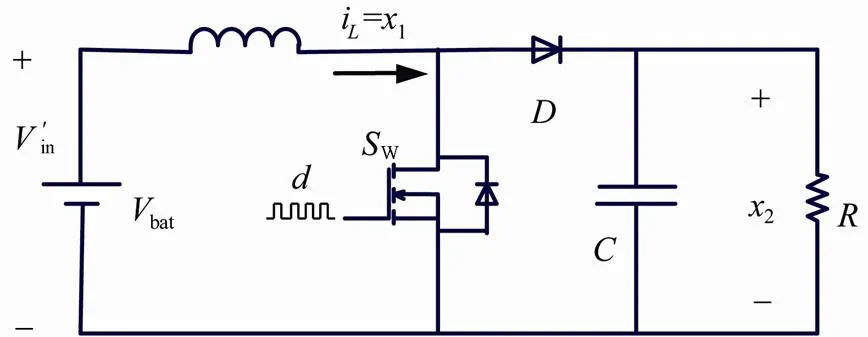
图1 升压型直流变换器等效电路

升压型直流变换器用于电动汽车复合电源系统中时,需要考虑电池内阻变化、负载变化和系统参数变化所引起的电流波动和输出电压波动,下文提出一种滑模控制,在跟踪电流误差的基础上,克服上述不确定性因素对系统造成的干扰,实现电流控制的鲁棒性以保证复合电源系统中电池组的安全和使用寿命。
2 滑模控制与滑模观测器
2.1 电流滑模控制



可求得控制量,即占空比为:
(7)

2.2 自适应滑模观测器





与文献[15]的不同之处在于,基于上述自适应观测器的滑模控制可以保证电流控制的鲁棒性。滑模控制因子(自适应占空比)计算为:


3 双幂次滑模滞环控制策略
3.1 双幂次滑模控制

本文提出一种针对系统不同趋近过程特点进行目的性调节的双幂次滑模趋近律,形式如下


3.2 滑模滞环控制器


图2 滑模滞环控制器
4 仿真研究


图3 双幂次滑模趋近滞环控制策略框图
4.1 参数分析及选择

图4 k不同取值对应的启动电流仿真结果


图5 幂指数不同取值对应的启动电流仿真结果
4.2 仿真验证
为了验证所提出的双幂次滑模趋近滞环控制策略对升压型直流变换器稳定性控制的有效性和优越性,首先测试启动时的响应情况,并与常用的指数趋近律进行对比,启动后要求电流稳定在10A,仿真对比结果见图6,详细仿真数据如表1所示。升压型直流变换器在启动时采用双幂次趋近律控制,其启动电流、输出电压、滑模面以及占空比的启动响应时间分别缩短约58.8%、54.3%、50%和66.7%,即在启动时可以更快进入工作状态并达到稳定无波动,且曲线抖振幅值更小,保证了电流控制的鲁棒性,有利于提升系统稳定性和高效性。

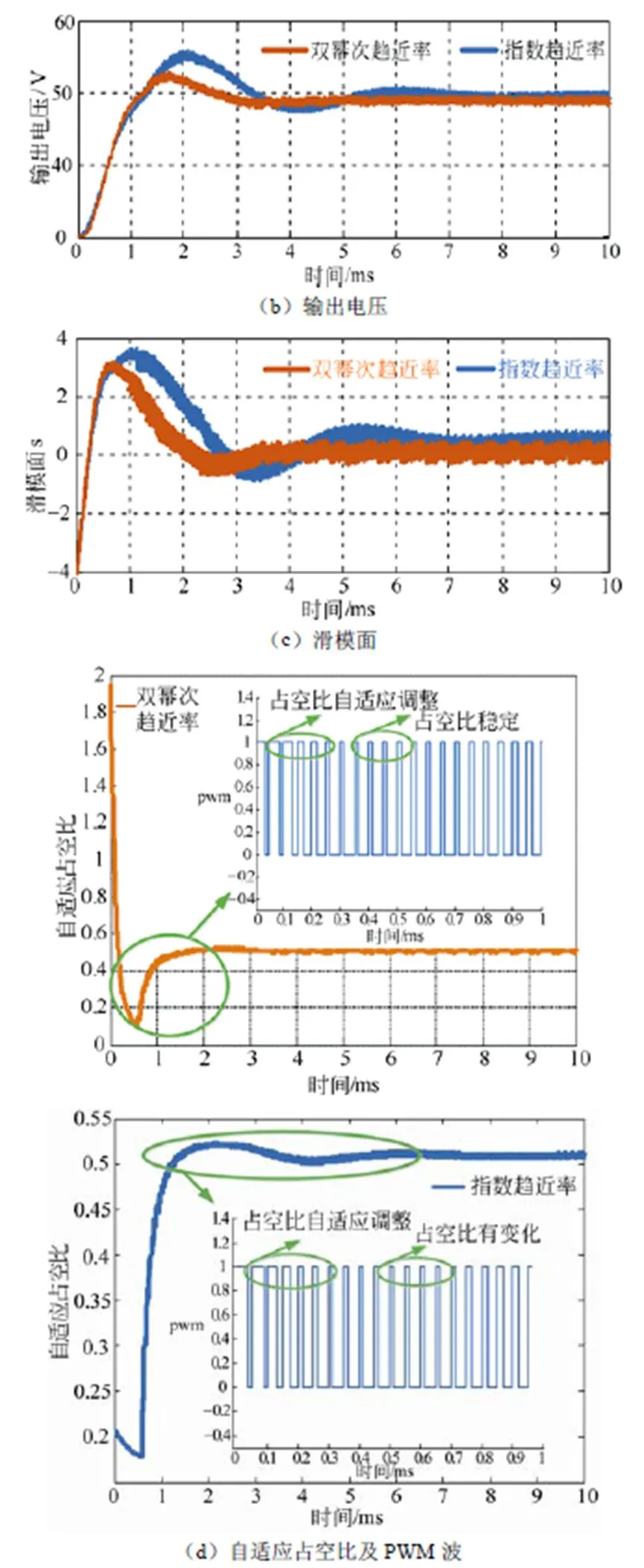
图6 恒定负载(10Ω)启动时两种趋近律对比仿真结果

表1 双幂次趋近律与指数趋近律的启动响应时间
为了模拟负载突变,分别对升压型直流变换器输出端进行加载和卸载操作,电流瞬时响应对比结果见图7。图7(a)为加载结果,0.05s时在输出端突然并入10Ω电阻,使得负载电阻由10Ω突变至5Ω,电感电流瞬间增大;图7(b)为卸载操作结果,0.05s时在输出端突然撤掉10Ω电阻,使得负载电阻由5Ω突变至10Ω,电感电流瞬间减小。详细仿真数据分别如表2和表3所示。升压型直流变换器在负载突变时采用双幂次趋近律控制,加载和卸载时瞬时电流响应时间分别缩短约45.7%和61%,且电流跳变峰值更小,稳定后不波动,即双幂次趋近律在升压型直流变换器负载突变情况下的稳定性控制更为有效,且瞬时响应能力更强。

图7 负载突变时两种趋近律对应的瞬时电流仿真结果

表2 加载时两种趋近律的电流瞬时响应时间和峰值

表3 卸载时两种趋近律的电流瞬时响应时间和峰值
5 结 论
本文提出一种双幂次滑模趋近滞环控制策略,通过考虑未知扰动和负载变化,建立了升压型直流变换器的等效电路和平均状态空间模型,设计了自适应状态观测器。提出了一种双幂次趋近律并进行参数选择,设计了滑模滞环控制器以削弱由符号函数项所引起的抖振。
仿真结果显示采用双幂次趋近律控制,启动时可使电流、输出电压、滑模面以及占空比的响应时间分别缩短约58.8%、54.3%、50%和66.7%;加载和卸载时可使瞬时电流响应时间分别缩短约45.7%和61%,且各项指标跳变峰值更小,稳定后不波动,验证了双幂次趋近律在升压型直流变换器启动和负载突变情况下,瞬时响应能力更强且电流控制的鲁棒性更优。
[1] 郭亮, 贾彦, 康丽, 等. 一种蓄电池和超级电容器复合储能系统[J]. 储能科学与技术, 2017 , 6 (2): 296-301.
GUO L, JIA Y, KANG L, et al. The composite storage system using lead storage battery and EDLC[J]. Energy Storage Science and Technology, 2017, 6 (2): 296-301.
[2] KOMURCUGIL H. Non-singular terminal sliding-mode control of DC-DC buck converters[J]. Control Engineering Practice, 2013, 21(3): 321-332.
[3] WANG B, XU J, WAI R J, et al. Adaptive sliding-mode with hysteresis control strategy for simple multi-mode hybrid energy storage system in electric vehicles[J]. IEEE Transactions on Industrial Electronics, 2017, 64 (2): 1404-1414.
[4] SHEN L, LU D C, LI C. Adaptive sliding mode control method for DC-DC converters[J]. IET Power Electronics, 2015, 8 (9): 1723-1732.
[5] FU J, WANG L, DU Y, et al. A robust sliding mode control for nonlinear system with adjustable chattering phenomenon[C]// Variable Structure Systems (VSS), 2016 14th International Workshop on IEEE, 2016: 34-38.
[6] SWIKIR A, UTKIN V. Chattering analysis of conventional and super twisting sliding mode control algorithm[C]//Variable Structure Systems (VSS), 2016 14th International Workshop on IEEE, 2016: 98-102.
[7] SURYAWANSHI P V, SHENDGE P D, PHADKE S B. A boundary layer sliding mode control design for chatter reduction using uncertainty and disturbance estimator[J]. International Journal of Dynamics and Control, 2016, 4(4): 456-465.
[8] GUZMAN R, VICUNA L G D, MORALES J, et al. Sliding-mode control for a three-phase unity power factor rectifier operating at fixed switching frequency[J]. IEEE Transactions on Power Electronics, 2015, 31(1): 758-769.
[9] 姚中华, 孙跃, 唐春森, 等. 连续时间系统滑模趋近律的改进[J]. 重庆大学学报, 2013, 36(4): 51-55.
YAO Z H, SUN Y, TANG C S, et al. An improved sliding mode reaching law for continuous-time system[J]. Journal of Chongqing University, 2013, 36(4): 51-55.
[10] ZHANG L, CONG D, YANG Z, et al. Robust tracking and synchronization of double shaking tables based on adaptive sliding mode control with novel reaching law[J]. IEEE Access, 2016, 99: 1.
[11] 李慧洁, 蔡远利. 基于双幂次趋近律的滑模控制方法[J]. 控制与决策, 2016, 31(3): 498-502.
LI H J, CAI Y L, Sliding mode control with double power reaching law[J]. Control and Decision, 2016, 31(3): 498-502.
[12] 张瑶, 马广富, 郭延宁, 等. 一种多幂次滑模趋近律设计与分析[J]. 自动化学报, 2016, 42(3): 466-472.
ZHANG Y, MA G F , GUO Y N , et al. A multi power reaching law of sliding mode control design and analysis[J]. Acta Automatica Sinica, 2016, 42(3): 466-472.
[13] WANG H, ZHAO X, TIAN Y. Trajectory tracking control of xy table using sliding mode adaptive control based on fast double power reaching law[J]. Asian Journal of Control, 2016, 18(6): 2263-2271.
[14] LIU J, VAZQUEZ S, WU L, et al. Extended state observer-based sliding-mode control for three-phase power converters[J]. IEEE Transactions on Industrial Electronics, 2017, 64(1): 22-31.
[15] 王斌, 徐俊, 曹秉刚, 等. 升压型电池-超级电容复合电源的自适应滑模控制[J]. 西安交通大学学报, 2016, 50(10): 36-41.
WANG B, XU J, CAO B G, et al. An adaptive sliding-mode control strategy for hybrid power sources of battery-supercapacitor with a boost converter[J]. Journal of Xi’an Jiaotong University, 2016, 50 (10): 36-41.
[16] WAI R J, SHI L C. Adaptive fuzzy-neural-network design for voltage tracking control of a DC-DC boost converter[J]. IEEE Transactions on Power Electronics, 2012, 27(4): 2104-2115.
[17] MOZAYAN S M, SAAD M, VAHEDI H, et al. Sliding mode control of pmsg wind turbine based on enhanced exponential reaching law[J]. IEEE Transactions on Industrial Electronics, 2016, 63(10): 6148-6159.
[18] MA H, WU J, XIONG Z. A novel exponential reaching law of discrete-time sliding-mode control[J]. IEEE Transactions on Industrial Electronics, 2017, 99: 1.
[19] KOMURCUGIL H. Adaptive terminal sliding-mode control strategy for DC-DC buck converters[J]. ISA transactions, 2012, 51(6): 673-681.
[20] REPECHO V, BIEL D, OLM J M, et al. Switching frequency regulation in sliding mode control by a hysteresis band controller[J]. IEEE Transactions on Power Electronics, 2017, 32(2): 1557-1569.
Study on the control strategy for a boost converter used in hybrid energy storage system of electric vehicles
1,2,1,2,3,3,3
(1Hubei Key Laboratory of Power System Design and Test for Electrical Vehicle, Hubei University of Arits and Science, Xiangyang 441053, Hubei, China;2School of Automotive and Traffic Engineering, Hubei University of Arits and Science, Xiangyang 441053, Hubei, China;3Dongfeng Xiangyang Touring Car Co., Ltd., Xiangyang 441000, Hubei, China)
The boost converter suffers the low convergence speed and chattering phenomenon in the scheme with sliding mode variable structure control. A double power reaching law-based sliding mode hysteresis control strategy is proposed. To achieve the current tracking control, a sliding surface is defined based on the estimated tracking current error. By considering the unmodeled dynamics and the unknown disturbances, the adaptive state observer is established. The adaptation laws are designed based on the Lyapunov function and the adaptive dutyratio is calculated. A double power reaching law is proposed, which can set the parameter selection standard according to the different features of system approaching process and purposefully adjust the dynamic response quality. A sliding mode hysteresis controller is designed, which aims at reducing chattering phenomenon caused by the sign function. Simulation results show that the dynamic response performance and robustness of current control are improved effectively.
double power reaching law; sliding-mode control; adaptive state observer; hysteresis controller; boost converter
10.12028/j.issn.2095-4239.2018.0180
TP 212
A
2095-4239(2019)02-379-07
2018-09-05;
2018-11-16。
湖北省技术创新专项重大项目(2017AAA133);“机电汽车”湖北省优势特色学科群开放基金(XKQ2018002)。
聂金泉(1987—),男,博士,研究方向为测试与控制技术,E-mail: niejinquan_hbuas@163.com;
吴华伟,副教授,研究方向为机电系统设计故障诊断与健康管理,E-mail:whw_xy@163.com。
