5 G-V 2 X应用场景和通信需求研究
2019-03-11丁启枫吕玉琦
丁启枫,杜 昊,吕玉琦
(国家无线电监测中心检测中心,北京 100041)
1 引言
随着近些年我国车联网产业的迅猛发展,关键技术的突破频率日益加快,作为当前解决道路安全研究热点的C-V2X技术,已然伴随着加速到来的5G时代从LTE-V2X进化为5G-V2X,利用5G低时延、高可靠、容量大的特点,5G-V2X将会在更多应用领域给C-V2X带来新的技术革新和功能需求。
2 5G-V2X通信特点及应用场景
5G-V2X的通信模式具有五大特点:一是可以根据场景需求自适应控制通信可靠性和覆盖范围;二是支持广播、组播和单播工作;三是支持有效的资源分配和高密度场景下的有效连接;四是能够支持亚米级高精度定位(<0.1m);五是支持不同的3GPP无线接入网络技术,支持不同的覆盖范围和复杂网络类型。
基于3GPP TS22.886文件内容描述,5G-V2X将支持四大领域共计22个场景。4个主要领域分别为编队驾驶、先进驾驶、远程驾驶和传感器共享。同时根据需求分析,5G-V2X也将能为L1-L5的自动驾驶提供全方位的网联化信息。
3 编队驾驶领域主要应用场景
3.1 eV2X技术下的编队驾驶
编队驾驶就是让车辆犹如整厢火车般形成编队并保持动态行驶,编队车辆之间需实时保持其行驶速度、方向、车辆动作(包括加速、制动等)等信息共享,因此车辆间仿佛用一条无形的绳索连接起来,通过这样排列方式,就可以极大缩短车辆间距,削减燃料消耗,并且所需的驾驶司机数量也可以减少。编队驾驶技术包含三个方面:
(1)组建或离开:车辆间要想组建成一个编队驾驶,需要他们彼此交换想要编队的意图,以及确定编队的领队和跟随者。当某辆车到达了目的地或者想要离开编队时,它要将意图及时传达给编队中的其他车辆。在编队正常驾驶时,须保持车辆间的动态信息随时进行交换共享。
(2)通告或警告:在编队正常驾驶时,其他不属于该编队的车辆应意识到编队的存在,否则这个车辆可能会误入到编队之中并打断了编队的正常驾驶。因此,驾驶编队应当让编队通信范围之外的车辆感知。
(3)队内通信:编队正常驾驶时,编队内的车辆需要将到达目的地、是否或何时作出加速或制动的举动等信息进行上传。此外,由于编队领队要比其他跟随车辆消耗更多的燃料,所以在需要的时候领队车可以要求另一辆车来担当领队,并且这种类型的通信仅需在两辆车之间进行,无需惊动其他队内车辆。
为预防隐私数据外泄等潜在威胁,编队驾驶时的通信数据应当加密并且只能由编队中的车辆来进行解密。此外,由于信息的私密性,编队的通信范围应在车头与车尾之间,而且要保持在视频范围内,这是因为编队的长短可能会随着编队的移动而发生改变,因此为了分布有效的资源信息,以便对编队中信息的分发区域进行动态控制。[1]具体通信参数要求如表1所示:

表1 部分通信参数要求
3.2 编队驾驶内部的信息交换
行驶在道路上的车辆,可以随时随地组成编队进行驾驶,编队的创建者将负责整个编队的管理。创建者须实时将编队成员提供的周边交通数据进行更新并上传到路边单元(RSU);同时,创建者也要实时从路边单元接收路况及交通信息,并分享至其他编队成员。所有编队成员也可以自行通过V2V分享最新信息。
编队成员可以通过两种方式获取信息。一种是通过V2V方式,另一种是接收来自编队创建者获取的路边单元信息,这两种获取的信息都将被用作建立完善高精密度动态驾驶地图。车与车之间的信息交换将被称作新的Q&A模式。具体通信参数要求如表2所示:

表2 部分通信参数要求
4 先进驾驶领域主要应用场景
4.1 自动驾驶连接协同避撞(CoCA)
为了让车辆更准确地评估事故隐患概率并启动相应协同操作,除了通常需要用到的CAM技术、DENM安全信息、传感器数据、一系列的诸如刹车加速等指令外、车辆间也需要通过3GPP V2X通信技术将横向和纵向控制信息在道路交通应用中进行交换分享。具体通信参数要求如表3所示:

表3 部分通信参数要求
4.2 自动驾驶下的信息共享
有限自动驾驶情景可以理解为处于SAE2级和SAE3级的自动驾驶水平,假设其车辆间距离较宽(例如大于车辆速度*两秒),并且具备初级的数据交换能力。完全自动驾驶情景可以理解为处于SAE4级和SAE5级的自动驾驶水平,假设其车辆间距离较宽(例如大于车辆速度*两秒),并且具备高分辨率的数据交换能力。[2]具体通信参数要求如表4所示:
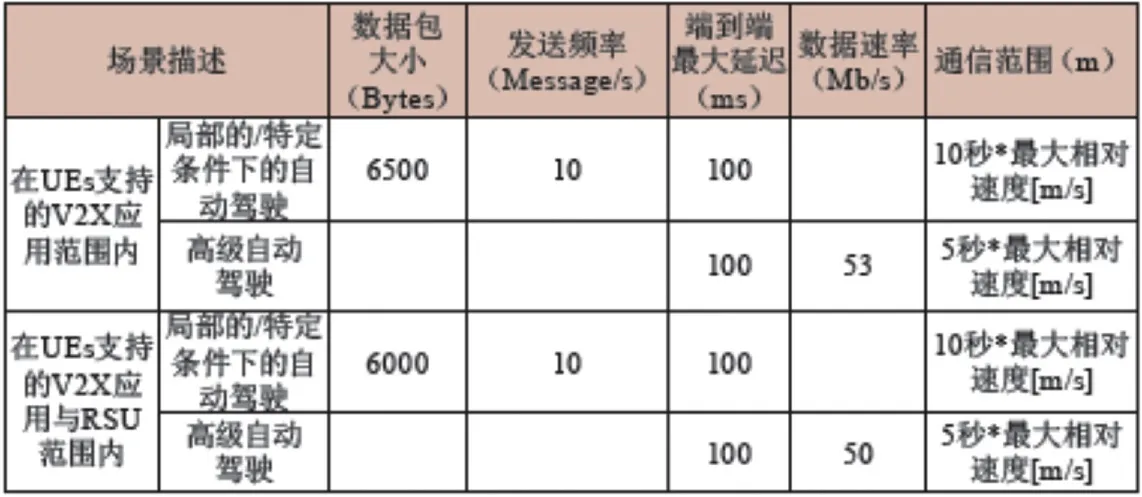
表4 部分通信参数要求
5 远程驾驶领域主要应用场景
5.1 eV2X技术下的远程驾驶
远程驾驶是由人或者云计算对车辆进行远程操作的驾驶模式。由于自动驾驶需要使用大量的传感器和诸如目标识别等复杂的算法,而利用人为的进行远程操作便可大大减少传感器及算法的数量。例如,当车辆通过车载摄像头将实时视频传送给远程操控者,操作者无需进行任何复杂的机器运算便轻松了解车辆的潜在危险,同时基于这些实时视频,远程操作者还可以随时向车辆发送指令。远程驾驶相比自动驾驶可以运用在更多特定的场景,比如在公共汽车场景中,公共汽车会遵循预先设定好的静态路线及特定车道行驶,因此运营公共汽车所需的要求就会和自动驾驶不同,对于这类情况,远程驾驶所提供的实时视频流不仅包括车辆外部图像,还有车内图像,这样在运营公共汽车时利用远程遥控就可以针对乘客上下这种多样化的场景及时作出判断。此外,当云计算取代人工操作后,更可以对多个车辆进行统筹协调。假如所有的车辆都提供他们的时刻表和目的地,云计算就可以协调每辆汽车的出行路线,通过统筹协调技术将大幅减少潜在出现的交通拥堵情况,缩短车辆出行的整体时间,并间接地提高了燃油效率。
5.2 远程监控技术(TeSo)
虽然保障交通安全及无障碍驾驶是每一辆自动驾驶汽车的职责所在,但是远程监控技术可以帮助人们在短时间内远程控制自动驾驶汽车。远程监控技术可使像除雪等道路建设(通过一个人远程操纵多辆自动驾驶汽车)应用方面变得更有效率。具体通信参数要求如表5所示:

表5 部分通信参数要求
6 传感器共享主要应用场景
6.1 自动驾驶下的传感器及状态图共享
自动驾驶下的传感器及地图共享(SSMS)能够去共享未经处理或者已处理的信息来建立整体环境感知。该技术是针对ETSI和ISO技术报告及标准中提出的本地动态地图扩展技术概念的呈现,相对于概念,该技术主要变化在于更精确的时空度、更低延迟以及拥有从超本地化的运输链接过渡到“状态图”区域网络的感知能力。传感器及状态图共享将会利用到可靠性传输及系统弹性等性能。该技术能够对精密定位及控制下的低延迟通信提供服务,也可以对像编队驾驶、道路交通安全信息及人车紧急通信等关键任务程序提供技术支持,对于之前应用中所用到的高分辨率传感器图像,虽然在使用过程不一定需要进行传输,但是由于过多的各式传感器需要进行连接,所以可预计传感器及状态图共享技术需要消耗很大的数据带宽。具体通信参数要求如表6所示:

表6 通信参数要求
6.2 集体环境感知技术
车辆可以在邻近区域实时交换来自用户类型路侧单元(UERSU)的传感器信息或者传感器数据,通过这种类型的信息交换方式形成了环境集体感知。该技术可以增强汽车间的环境感知能力从而避免事故隐患。具体通信参数要求如表7所示:
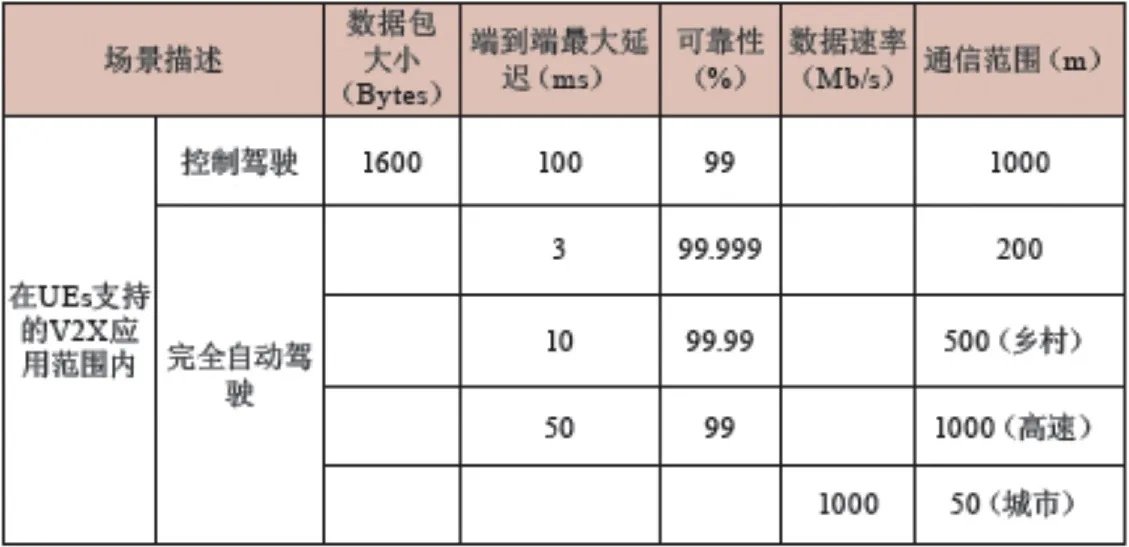
表7 通信参数要求
6.3 自动驾驶下的视频数据共享
驾驶员的视野范围在某些交通道路情况下会受阻,比如前方有辆驾驶中的大型卡车。在这些安全关键的情景下,受阻车辆可以通过从其他车辆发送来的视频数据得到有利的技术支持。视频数据也可以通过某一个具备条件的用户类型路边单元收集并发送至车辆。然而仅共享预处理数据是不够的(比如通过自动目标检测提取),驾驶员的驾驶判断还取决于他们的驾驶能力和安全偏好(车距、迎面驶来的车辆速度)。高分辨率的视频数据共享可以更好地根据驾驶者安全偏好来进行操作决策支撑。反之,低分辨率视频数据的效果并不出色,因为其低分辨率会让一些障碍变的模糊,进而有可能会让驾驶者忽略。此外,也要避免对传输的视频数据进行压缩,因为这个行为会导致传输延迟增高。具体通信参数要求如表8所示:

表8 通信参数要求
7 结束语
随着近日工业和信息化部关于《车联网(智能网联汽车)直连通信使用5905-5925MHz频段管理规定(暂行)》的出台,LTEV2X所需的无线电工作频段已被正式确定,这将无疑为LTEV2X的发展提供了定心丸,而伴随着5G技术的加速发展,5GV2X 3GPP应用场景和通信需求的基本敲定,结合芯片厂商的车联网芯片均匹配LTE和5G技术下的V2X应用,未来5G-V2X将代替LTE-V2X成为主流,智能网联汽车的加速也成为推进汽车产业的首选。
