离散多智能体系统中分布式事件触发的H∞滤波①
2019-03-11李嘉豪高金凤
李嘉豪,高金凤
(浙江理工大学 机械与自动控制学院,杭州 310018)
近年来,多智能体系统已成为众多研究领域的前沿课题,在车辆编队控制[1],传感器网络[2],机器人技术[3],群集运动[4]等方面存在广泛的应用.其中,一致性问题[5]最为热门.然而,有关滤波的问题却较少提及.传感器网络可以看作为一类特殊的多智能体系统,而滤波问题是传感器网络最基本的课题之一.由于传感器节点通常分布的很广,因此,在现实中多采用分布式滤波或估计.在过去的几十年中,分布式滤波问题主要采用的是Kalman滤波理论[6].但是,Kalman滤波需要知道外部扰动噪声,对数学模型的精确要求非常高.与传统的Kalman滤波相比,H∞滤波的抗干扰性非常高,不需要知道噪声信息,只需要滤波误差满足给定的H∞性能指标.因此,对H∞滤波的研究与分析有着积极的意义,学者们也取得了大量的科研成果[7,8].
众所周知,通信网络的带宽和资源是有限的,相比于有线网络,无线网络对带宽的要求更是严格.而周期触发方式把所有的采样信号都传输到滤波器,造成不必要的网络资源的浪费.因此,学者们为了解决这一问题,提出了基于事件触发机制的滤波器设计方法[9-11].文献[9]建立了一个结合事件触发机制和网络诱导时延的模型,利用滤波误差系统的方法解决H∞滤波问题.文献[10]提出一类具有事件触发机制和量化的神经网络系统H∞滤波器设计.文献[11]研究了传感器网络中的分布式H∞一致性滤波问题,其中每个传感器的传输由事件触发.由于文献[11]研究的传感器网络拓扑结构是固定不变的,然而在实际应用中,由于链路故障、丢包和信道衰落等因素,网络拓扑结构可能会发生变化,因此,我们在此基础上扩展到具有马尔科夫切换拓扑和基于事件触发策略的带有网络诱导时延的离散时间多智能体系统滤波的研究.
受上述讨论的推动,本文研究了具有切换拓扑的离散时间多智能体系统的事件触发H∞滤波问题.考虑到网络诱导时延的存在,利用马尔可夫过程对网络拓扑的切换进行建模,采用事件触发控制方案并结合所提的H∞滤波器,将分布式滤波误差系统建模成一个时变时滞的闭环系统.基于Lyapunov稳定性理论和线性矩阵不等式方法,得到了保证误差系统实现具有H∞性能指标渐近稳定性的一些充分条件.在本文中,采用Jensen不等式来处理积分项,这样不但可以减少计算量,而且还降低保守性.最后,通过仿真例子验证了所提方法的有效性.
1 问题描述
1.1 预备知识
Rn表示n维 的欧式空间,Rn×m表示n×m阶实矩阵集合.IN表示n维单位矩阵,0表示具有适当维数的零矩阵.上标 - 1和 T 分别表示矩阵的逆和转置.符号 ⊗ 和 ∗分别表示Kronecker积和对称矩阵的对称部分.(A⊗B)T=AT⊗BT,(A⊗B)(C⊗D)=AC⊗BD.
用G=(V,E,A)表示一个n阶有向加权图,其中V={v1,v2,···,vn}表示图G顶点集合,E⊆V×V表示图G的有向边集合.一条从节点vi到节点vj的有向边表示为.用表示节点vi的邻居集.邻接矩阵,其中矩阵元素aij表示为节点vi与节点vj的连接权重.如果vj∈Ni,则aij>0,否则aij=0.定义度矩阵D=diag{d1,d2,···,dN},其中对角元素表示节点vi的出度.图G的Laplacian矩阵定义为.其中,,且lij=-aij,i≠j.
1.2 系统描述
考虑含有N个智能体的离散时间多智能体系统:

其中,xi(k)∈Rn、yi(k)∈Rm和zi(k)∈Rp分别表示第i个智能体的状态、测量输出和带估计信号;wi(k)∈Rl表示系统的外部扰动,并且wi(k)∈L2[0,∞);A,B,C,D和E是已知的常数矩阵.

转移概率矩阵可以定义如下:
考虑到随机切换拓扑,系统(1)可以重新写成:
为了便于书写,在本文接下来的内容里,我们令r(k)=r.同时,离散多智能体系统的滤波器设计如下:

为了节约网络资源,我们采用了分布式事件触发传输策略和切换拓扑的结合,通过它来判断是否需要把信号传输给滤波器.事件触发机制设计如下:

注释1.从式(4)可以看出,事件触发阈值由参数σr确定.较大的σr允许采样数据的较大变化,这意味数据传输的数量减少.当阈值参数 σr接近于零时,几乎所有的采样数据都可以触发事件状态.也就是说,事件触发机制退化为周期采样机制.
注释2.由于每个智能体都是周期采样的,采样时间序列为{0,1,2,···},我们可以发现事件触发时间序列是采样时间序列的一个子序列,即⊆{0,1,2,···}.因此,事件触发策略(4)能够自动排除Zeno现象.
由于零阶保持器的作用是用来存储最新传送过来的数据,滤波器输入可以表示为:

将式(6)带入式(3),我们可以得到:
运用文献[12]中的延时方法,将系统(2)建模成等价的时间滞后系统,我们可以得到误差向量ei(k)=,时延函数其中,0≤ τ(k).
因此,我们可以将事件触发条件(4)重新写成:

滤波器(7)可以重新写成:

定义以下向量:

结合式(2)和式(9),我们可以得到以下的闭环系统:
其中,

为了简述上述系统,定义一些新的增广变量:
因此,可以将滤波误差系统(10)改写为:
2 主要结果
定理1.假设系统的系数矩阵A,B,C,D,E和滤波器参数Fr,Gr已知,同时给定H∞性能指标 γ和 σr>0,如果存在适当的正定对称矩阵Pr>0,Q>0,R>0,φr>0(r∈S),满足以下的线性矩阵不等式:

其中,
证明:我们构造如下的Lyapunov函数:

其中,

那么,

其中,
根据Jensen不等式,我们可以得到:
结合事件触发策略(8),我们可以得到:

其中,

根据 Schur补定理,式 (12)确保 Ω <0,因此闭环系统(11)渐近稳定且具有H∞性能指标 γ.证毕.
由于以上的分析是假设滤波器参数已知的情况下,但在实际的情况中滤波器的参数是未知的,因此接下来我们在定理1的基础上设计H∞滤波器.
定理2.假设系统的系数矩阵A,B,C,D,E已知,同时给定H∞性能指标 γ和 σr>0,如果存在适当的正定对称矩阵Pr>0,Q> 0,R>0,φr>0Wr>0(r∈S),满足以下的线性矩阵不等式:
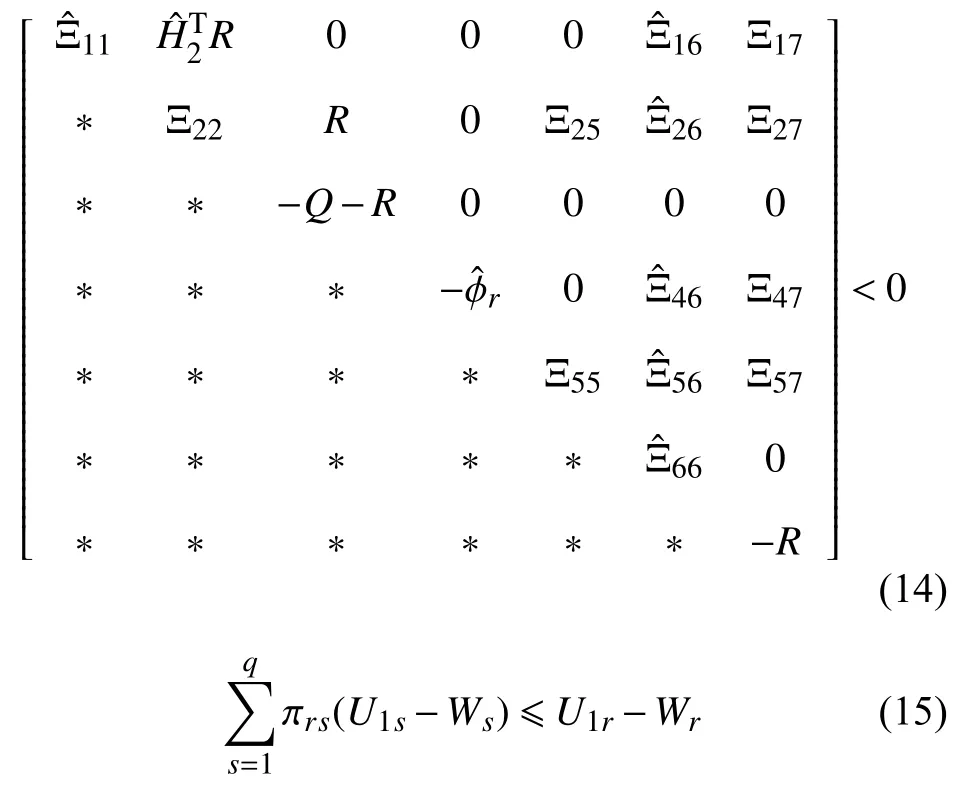
其中,
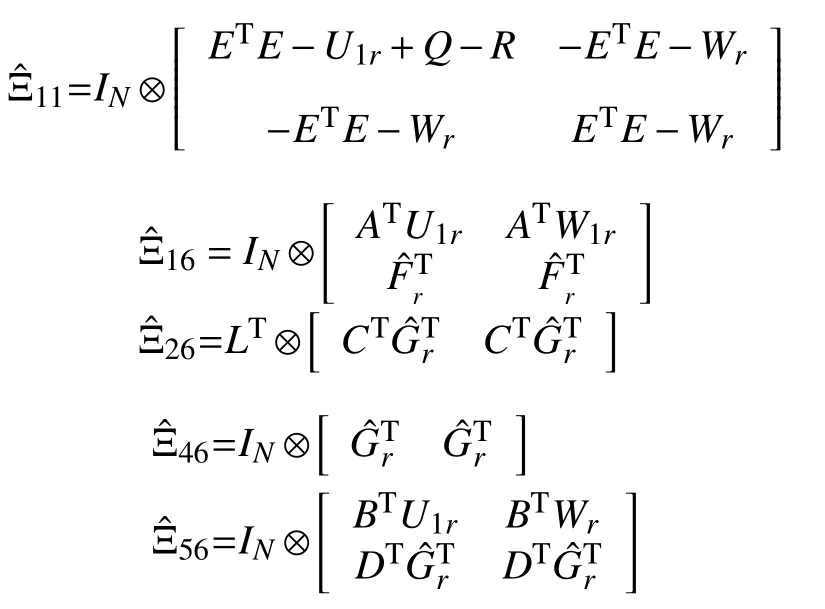

那么滤波误差系统是渐近稳定的,并且H∞扰动抑制水平为 γ.如果上述条件下是可行的,那么滤波器的参数为:

证明:令Pr=IN⊗Ur,Ur可以被拆分为:
其中,U1r>0,U2r和U3r是非奇异矩阵,满足Wr=U2r,根据 Schur补引理,我们可以得到U1r-Wr>0.定义可逆矩阵,同时在(12)左右乘以,其中,


通过简单的线性转换,我们可以很容易得到式(14).不难发现,式 (12)等价于式 (14),因此,滤波误差系统 (11)渐进稳定,并且具有H∞性能参数 γ.同时,我们也可以得到滤波器参数(16).证毕.
3 数值仿真
在这一节中,给出两个例子来说明所提出的方法的有效性.第一种情况考虑文献[11]中网络拓扑结构是固定不变的.考虑一个由4个智能体组成的多智能体系统,其参数变量为:

其中,外部扰动w(k)=0.4×e-0.15k×sin(k),图1代表固定的有向拓扑结构图.不失一般性,假设所有的权重都为1,其对应的Laplacian矩阵如下:

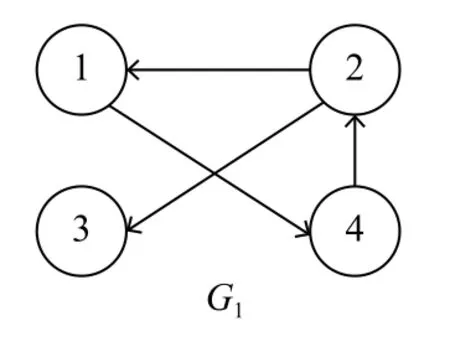
图1 网络通信拓扑图
令初始条件x1(0)=[0;3],x2( 0)=[5;2],x3( 0)=[10;5],x4(0)=[4;3].假设最大时延上界 τM=2,触发系数σ1=0.25,γ= 3 ,根据定理2,我们可以得到触发矩阵变量φ1=3.4749,滤波参数:

图2描绘的是每个智能体的滤波误差信号ei(k),从图中可以看到设计出的滤波器误差一开始震荡幅度偏大,但随之时间的变化滤波误差渐近为零,表明滤波器设计有效.图3描述了事件触发时刻和相邻两次触发时刻之间的时间间隔.在区间[0,100]之间,智能体1、2、3和4的采样数据的传输量为70、71、69和65次.这些结果表明事件触发机制能够减少采样信号传输的次数,避免网络资源的浪费.
第二种情况考虑网络拓扑结构是切换的.我们选取系统参数变量跟第一种情况一样.图4代表两种有向的网络通信拓扑结构图.不失一般性,假设所有的权重都为1,其对应的Laplacian矩阵如下:
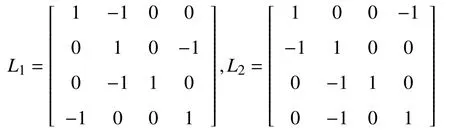
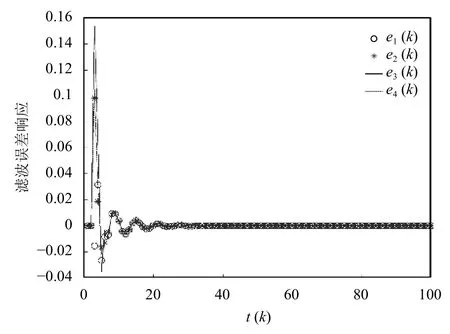
图2 每个智能体的滤波误差
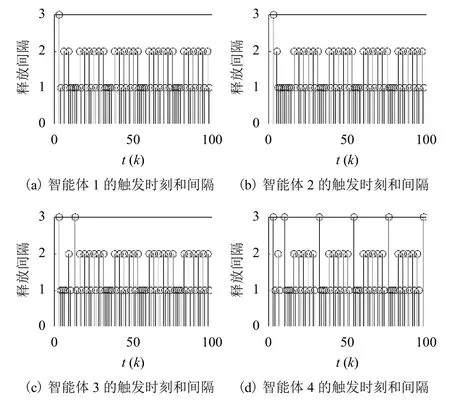
图3 每个智能体的触发时刻和触发时间间隔
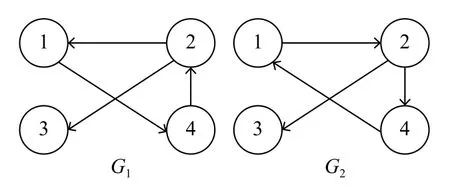
图4 网络通信拓扑图
图5表示马尔可夫链中两种模式的切换.其中,状态转移概率矩阵为:
假设最大时延上界τM=2,触发系数 σ1=0.35,σ2= 0.45,γ=3,根据定理 2,我们可以得到触发矩阵变量φ1=8.8393,φ2= 1.6012,滤波参数:
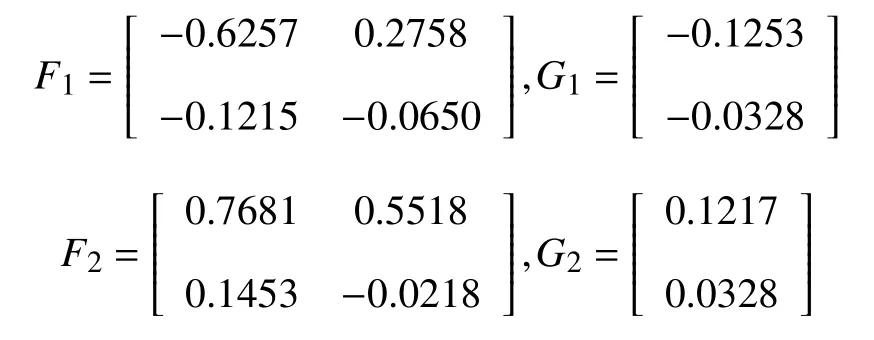
图6描绘的是每个智能体的滤波误差信号ei(k),从图中可以看到设计出的滤波器误差一开始震荡幅度偏大,但随之时间的变化滤波误差渐近为零,表明滤波器设计有效.图7描述了事件触发时刻和相邻两次触发时刻之间的时间间隔.在区间[0,100]之间,智能体1、2、3和4的采样数据的传输量为57、56、55和55次.这些结果表明事件触发机制能够减少采样信号传输的次数,避免网络资源的浪费.

图5 切换信号
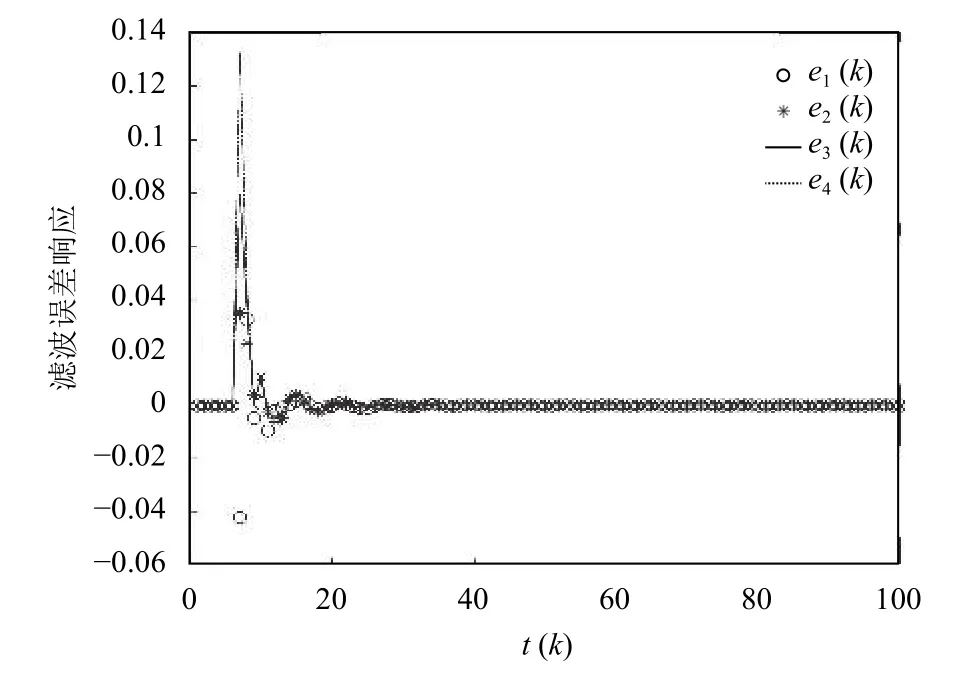
图6 每个智能体的滤波误差
注释3.虽然事件触发机制能有效减少网络信号的传送,节省网络带宽资源的占用率,但是相对于周期触发方式,事件触发方式需要复杂的数学计算与分析,由于目前大部分结果仅关注事件触发网络控制系统的稳定性分析,无法设计事件触发网络化系统的滤波器.因此,为弥补已有结果的不足,我们引入相应的事件触发机制,提出对应的事件触发滤波器联合设计的方法.
4 结论
本文研究了具有切换拓扑的离散时间多智能体系统的事件触发H∞滤波问题.通过构造包含多区间上下界信息的Lyapunov-Krasovskii泛函,采用Jensen不等式的方法,同时利用线性矩阵不等式技术和时延法,得出了滤波误差系统渐近稳定性的充分条件和滤波器设计方法.最后,通过仿真例子验证了所提出的方法的有效性.
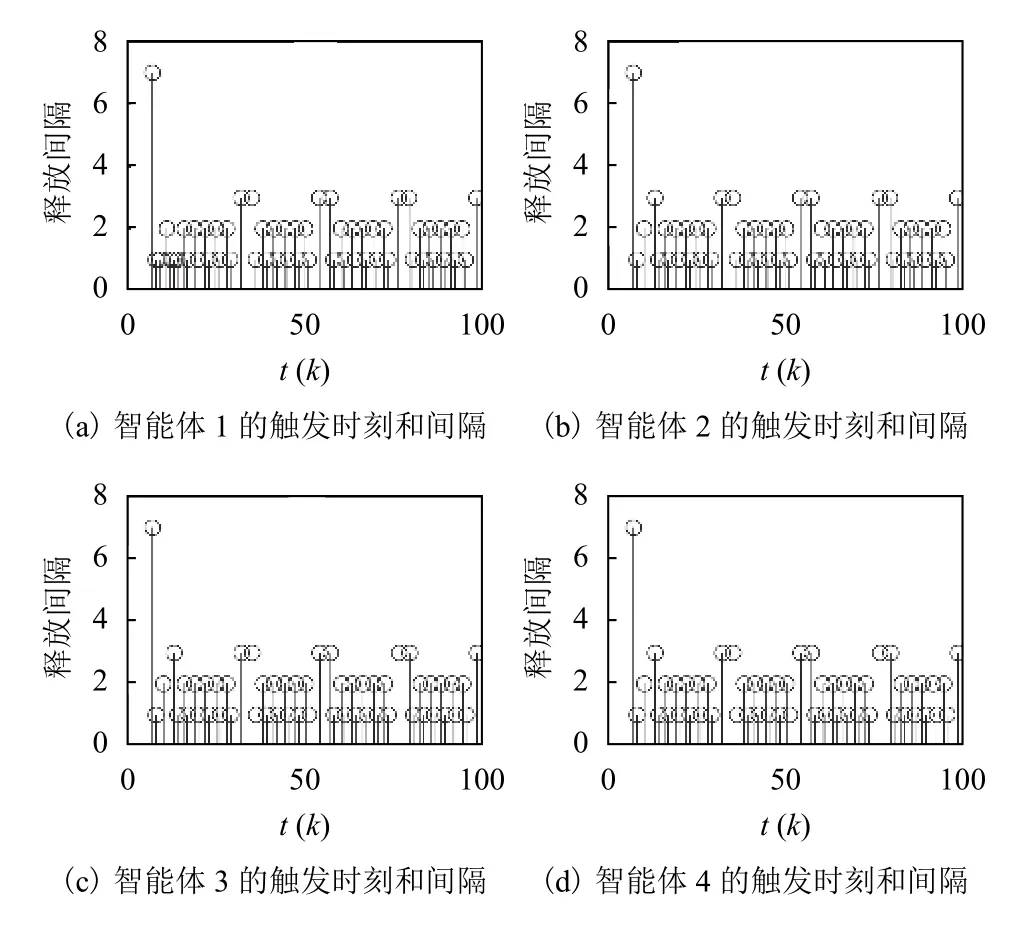
图7 每个智能体的触发时刻和触发时间间隔
本文主要是对4个智能体组成的多智能体系统进行了研究与实验仿真,由于智能体的数量相对较少,测试场景也相对简单,因此,在接下来的工作中主要会对复杂情形的多智能体系统进行建模与分析.