底盘衬套对整车平顺性影响灵敏度分析
2019-03-11王彬
王彬
(湖南湖大艾盛汽车技术开发有限公司,湖南长沙 410205)
0 引言
平顺性是指汽车在行驶过程中产生的振动和冲击环境对乘员舒适性的影响保持在一定界限之内的能力[1]。通过研究平顺性,可以控制汽车振动系统的动态特性,使振动的输出在给定的工况下不超过一定界限,以保持乘员的舒适性。
车辆通过不平整路面时,路面引起的振动通过底盘悬架上的衬套传递给车身,最后通过车身地板、座椅以及方向盘传递至车上乘员,从而影响整车振动和平顺性。
橡胶衬套作为悬架铰链处的缓冲元件,发挥着减振降噪和弥补制造公差的作用,有利于衰减路面激励对车身的振动与冲击,特别是衰减来自路面的高频激励,因此橡胶衬套在汽车结构上的隔振作用不容忽略。
本文作者应用ADAMS软件建立包含柔性体车身的刚柔耦合整车多体动力学模型,结合仿真分析和试验测试来研究底盘衬套对平顺性的影响。选取底盘衬套Z向刚度作为试验因素,对整车进行随机不平路面下的低频振动测试,并根据试验结果进行极差分析,得出各衬套对整车平顺性的灵敏度结果。
1 建立刚柔耦合整车多体动力学模型
文中以某车企MPV(Multi-Purpose Vehicles)为原型,利用有限元法将车身变成柔性体,应用ADAMS/Car软件建立刚柔耦合整车多体动力学模型。建立的整车刚柔耦合平顺性模型主要包括柔性车身、前悬架子系统、后悬架子系统、转向子系统、发动机子系统、制动系统、横向稳定杆、轮胎以及沥青路面(四柱试验台)。
根据该公司设计部门提供的整车主要参数,如表1所示。
根据整车主要参数建立各子系统模型,并装配成整车平顺性模型,如图1所示。

图1 整车刚柔耦合多体动力学模型
建立整车动力学模型后,通过与实车试验对比的方法对模型进行验证。为了使仿真结果与实车试验有较好的可比性,采用实车试验数据作为仿真模型的输入,对虚拟样机进行仿真分析。通常需要进行的验证试验包括悬架刚度特性分析、K & C分析、方向盘角阶跃试验、方向盘角脉冲输入试验等,如图2—图3所示。

图2 前悬架刚度特性分析

图3 角脉冲输入试验车身侧倾角对比
2 整车平顺性仿真分析
ADAMS/Car Ride是ADAMS/Car中即插即用模块,它是一个专门为平顺性开发的汽车平顺性虚拟环境。在ADAMS/Car Ride中用虚拟四柱试验台对ADAMS/Car轿车模块进行仿真试验,通过对试验台输入力或位移的RPC III格式数据文件,模拟汽车行驶在粗糙路面和碰撞石块时的响应特性。该研究应用ADAMS/Car Ride模块,通过对四柱试验台施加RPC III格式位移激励,模拟整车在满载状态下以60 km/h速度通过沥青B级路面的试验。
为了进行整车平顺性仿真,通过ADAMS/Car Ride插件所提供的路面轮廓发生器建立道路模型。路面轮廓发生器是ADAMS/Car Ride提供的一个基于Sayers数字模型的路面生成工具,该模型是一种经验模型。在路面谱生成器中,通过设置路面空间功率谱密度幅值、速度功率谱密度幅值和加速度功率谱密度幅值等参数生成RPC III格式路面谱文件。根据表2国际路面粗糙度标准中沥青路面的参数,在路面谱生成器中进行设置,得到沥青路面RPC III格式的路面谱文件。

表2 国际路面粗糙度标准
正交试验设计是试验优化技术中常用的试验方法,它是通过应用数学工作者编制的正交表来安排多因素试验,并用数理统计方法来分析试验数据,从而以较少的试验次数获得全面信息的方法。
文中主要研究悬架衬套对整车平顺性的影响,由于悬架衬套数量较多,为了尽量减少试验次数,缩短试验周期,因此采用正交试验设计来进行试验。
整车采用的是前麦弗逊、后多连杆悬架系统,由于悬架左右衬套对称且特性一致,只需选取一侧衬套进行试验即可。因此选取底盘前、后悬架17个衬套Z向刚度曲线作为试验因子,依据GB/T 4970-2009《汽车平顺性试验方法》,驾驶员座脚地板处3个方向加速度总加权均方根值为响应目标,使汽车在满载条件下,以60 km/h速度通过沥青路面进行试验。
前、后悬架17个衬套Z向刚度曲线作为试验因子如图4所示。

图4 前、后悬架17个衬套Z向刚度曲线作为试验因子
由于试验因子较多,试验次数也较多,因此将试验仿真在ADAMS/Insight中进行,根据试验设计矩阵自动完成一系列的试验仿真。在ADAMS/Insight中将前、后悬架17个衬套Z向刚度曲线作为试验因子,如图4所示。
考虑到试验因子比较多,为了减少试验次数,每个试验因子均选取2水平,分别是原来衬套曲线的70%和130%。正交试验所需的参数由设计矩阵提供,根据试验设计矩阵,完成一系列的试验仿真。该研究通过ADAMS/Insight中Screening法创建试验设计矩阵,如表3所示,共进行32次试验。

表3 试验方案表
仿真试验中,从测试点得到驾驶员脚地板处X、Y、Z向加速度曲线,图5是试验方案Trial01中,车辆以60 km/h速度通过沥青路面时测得的3个方向加速度振动曲线。

图5 驾驶员脚地板处在60 km/h速度时X、Y、Z向加速度振动曲线
3 仿真结果处理
根据GB/T 4970-2009《汽车平顺性试验方法》,将驾驶员座脚地板处3个方向总加权加速度均方根值作为平顺性评价指标,总加权加速度均方根值包含驾驶员座脚地板处X、Y、Z向的加权加速度均方根值。对测试点的加速度时间历程按式(1)计算测试点各轴向加权加速度均方根值:
(1)
式中:aw为轴向加权加速度均方根值,m/s2;aw(t)为加权加速度时间历程,m/s2;T为统计持续时间,s。
由于人体各部位对各方向的加速度敏感程度不一样,所以需要按式(2)对各轴向的加权加速度均方根值进行加权处理:
(2)
式中:av为总加权加速度均方根值,m/s2;awx为X向加权加速度均方根值,m/s2;awy为Y向加权加速度均方根值,m/s2;awz为Z向加权加速度均方根值,m/s2;kx、ky、kz为各轴轴加权系数[2]。
其中kx、ky、kz按照表4取得。 并根据式(2)计算得出各试验脚地板处总加权加速度均方根值,如表5所示。
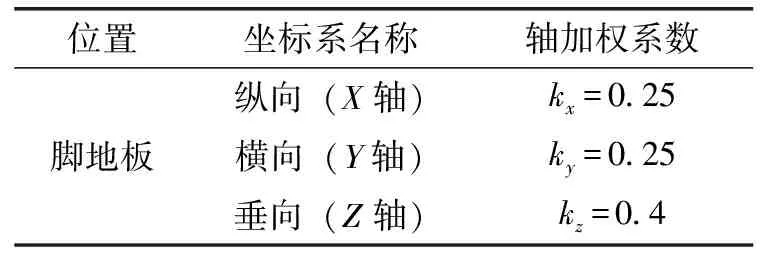
表4 脚地板位置轴加权系数表

表5 各试验脚地板处总加权加速度均方根值 m/s2
结合表3和表5,对试验结果进行极差分析,找出对整车低频振动影响较大的因子,如表6所示。
对试验结果进行极差分析,极差越大,说明该因子对评价指标影响越大。根据极差分析的结果显示:灵敏度较高的因子是F01、F15、F16、F06、F02,分别对应的是前悬减振器上端衬套、后悬副车架后端衬套、后悬副车架前段衬套、后悬减振器上端衬套以及前悬副车架后端衬套,其余衬套影响不显著。
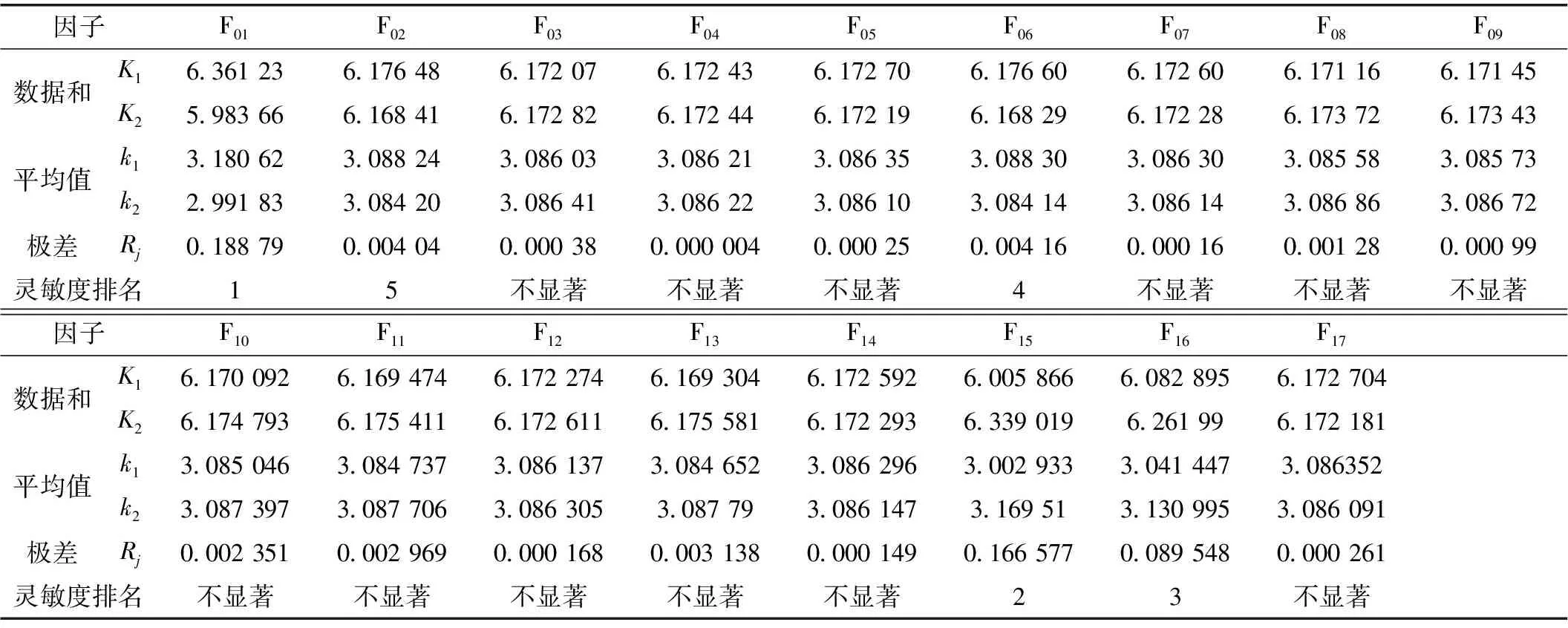
表6 对试验结果进行极差分析
4 结束语
(1)对整车低频振动影响较大的衬套分别是前悬减振器上端衬套、后悬副车架后端衬套、后悬副车架前端衬套、后悬减振器上端衬套以及前悬副车架后端衬套,其余衬套影响不显著。
(2)根据极差分析的结果,除了可以确定因子的主次,还可以分清各因子的水平优劣,并且可以确定进一步的试验方向及较优参数组合。在该研究中,可以对整车低频振动影响较大的因子再做优化分析,划分更多水平,同时固定灵敏度较低的因子,从而找出较优底盘衬套参数组合水平。