亚龙YL-335B型自动生产线机械手控制系统改进
2019-03-08王治学
王治学
(天津工业职业学院,天津300400)
0 引言
亚龙YL-335B型自动生产线装备由机械手单元、供料单元、装配单元、加工单元和分拣单元5个单元组成。各单元的基本功能为:机械手单元通过伺服驱动精准地找到目标工件抓取并运送到指定地点;供料单元向系统提供原料;装配单元对供料单元提供的工件进行镶嵌工作;加工单元将镶嵌好的工件放到冲压机构下面,完成一次冲压加工动作;分拣单元将已加工、装配的工件进行分拣,使不同颜色和材质的工件从不同的料槽分流[1]。
传统控制系统为:机械手每经过一个单元,待该单元执行完所有的动作之后,才执行下一步动作。在这期间,机械手一直是在该单元等待,严重影响生产线整体的效率,从而影响经济效益。为彻底解决这一问题,我们要打破原有的流程顺序,使机械手一直不停的工作,需要它停止时它才能停止运行。
1 自动化生产线工艺流程
1.1 传统机械手运动操作过程
传统机械手运动操作过程如下:系统启动后,机械手由伺服驱动前往供料单元;供料单元检测到机械手到来的信号,由气缸带动驱动机械装置推出原料工件,并发送推料完成信号给机械手;机械手进行抓取动作,然后前往装配单元;待其停止,机械手对工件进行放置动作,然后机械手收回,并给装配单元发送信号;装配单元对放置好的工件进行镶嵌工序,完成之后给机械手发送信号命令其抓取工件;机械手抓取完成前往加工单元进行放置;同理,加工完成后再由机械手送到分拣单元根据不同的材质和颜色来进行分类;分类完成后机械手前往供料单元开始下一周期工作。
可以看出,机械手在装配、加工、分拣甚至供料过程中浪费了大量时间,且同一时间只有一个单元在工作,这是第一个问题。另外,在实际运行中,运动控制在停止时由于惯性作用可能会导致伺服驱动脉冲的丢失,影响位置的精确度,可能会出生产事故,这是第二个问题。因此对控制系统的改进势在必行。
1.2 改进后机械手运动操作过程
从更高效的方面来考虑,在其他单元工作时,如果时间允许,可以驱动机械手再次从供料站抓取更多次的工件。这样既保证了多个单元同时工作,也减少了机械手的等待时间,一举两得。改进后机械手运动操作如下:首先,机械手从供料单元抓取工件1,经过装配单元,再到加工单元。放下工件1后直接回到供料单元,接着取工件2放在装配单元,然后去加工单元将刚刚加工好的工件1送到分拣单元进行分拣。在放置到分拣单元后,再前往装配单元把工件2放到加工单元,之后继续回供料单元取工件3,通过来回往复运转,解决了第一个问题。整个工艺流程的循环过程是机械手从第二次在供料单元抓取工件开始的,其工艺流程如图1所示。
2 电气控制系统分析
2.1 机械手电气控制分析
控制机械手所用的PLC为西门子200系列226型CPU,晶体管输出模式,选择的输入信号共有15个,包括10个传感器信号、4个开关信号和1个伺服报警信号,如表1所示。输出信号共有11个,包括6个电磁阀输出、3个指示灯和2个高速脉冲输出控制信号,如表2所示。这两高速脉冲信号其中一个控制脉冲的输出个数,另一个控制方向[2]。
机械手的动作均由相应的电磁阀推动气缸完成,每完成一个动作,相应的传感器会收到完成信号。当机械手收到抓取信号时,首先令伸出电磁阀线圈通电,机械手伸出;伸出到位传感器检测到信号时,会令夹紧电磁阀通电,执行夹紧动作;夹紧到位后执行上升动作;上升到位后机械手缩回,如图2所示。当机械手收到放置信号时,执行伸出、下降、松开和缩回这4个动作,如图3所示。如果运动目标是分拣单元时,在4个动作进行完后会多执行一个向左或者向右的动作。

2.2 机械手的运动控制分析
为了方便控制机械手的运动速度,运行信号采用MAN指令,机械手的运行速度会按照VD710中的数值,十分方便。停止信号采用CTRL指令,当满足STOP条件时,机械手会逐渐停止。位置控制采用LDPOS指令,VD610里记录着关于位置的实时脉冲信号,程序如图4所示。

表1 PLC控制机械手输入点分配表
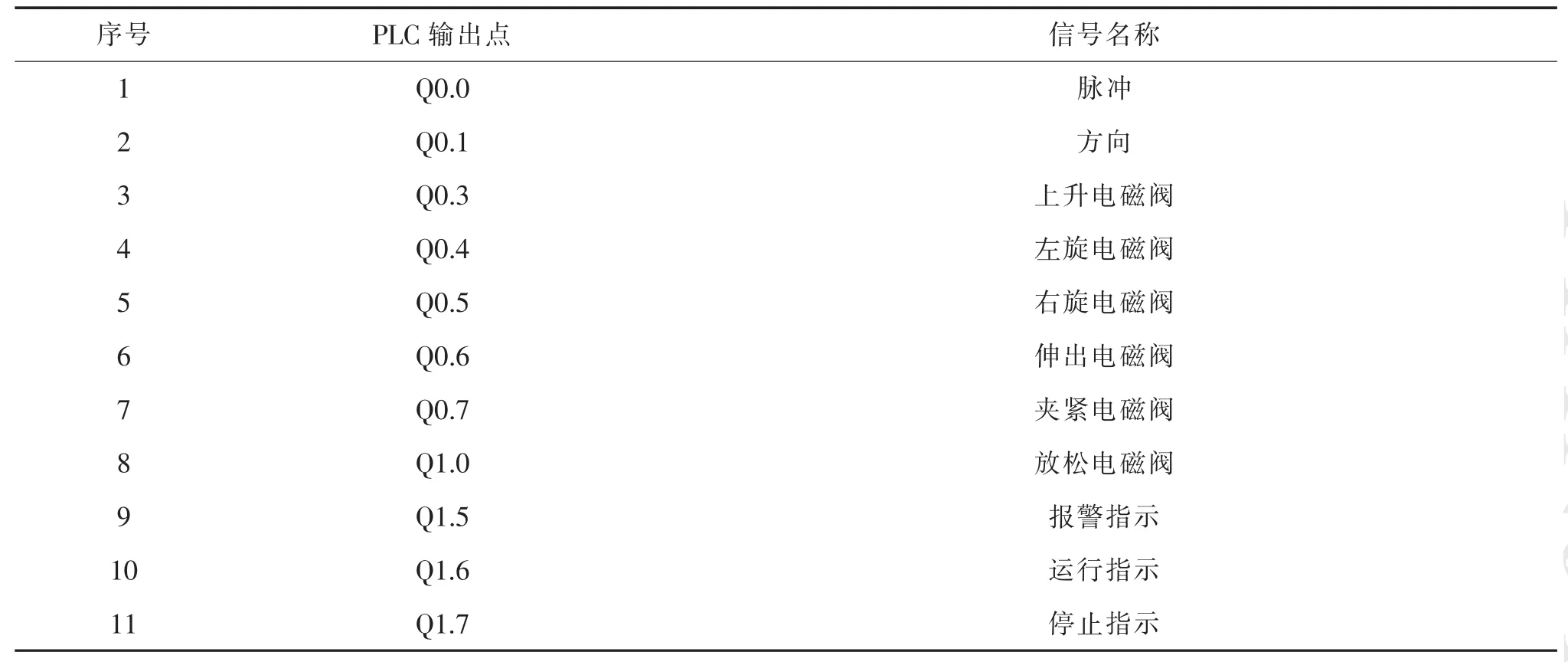
表2 PLC控制机械手输出点分配表

图2 机械手抓取动作程序

图3 机械手放置动作程序
2.3 机械手减速停止分析

图4 机械手启停和位置控制程序
为解决机械手由于惯性作用停止时导致脉冲丢失的问题,我们采用的策略是∶在机械手离目标还有一定位置时开始减速,随着离目标越来越近,速度逐渐变慢,到达目标位置时速度恰好降到0,如图5所示。VD610是机械手实时位置的脉冲数,VD810是目标位置的脉冲数,当两者距离减小到10000个脉冲以内时,开始以线性比例减速,直到速度降为0,如图5所示。这样就解决了第二个问题。

图5 机械手减速程序
3 结束语
目前,PLC控制的自动化生产线是制造业生产设备中的发展趋势,其中机械手更是不可或缺的。如何控制好机械手的运行速度、位置、可靠性等是必须考虑和解决的问题,生产安全和生产效率俩者是和经济效益紧密相关的。实验证明,新的工艺流程和降速停止功能的加入,能够使原有生产线的生产效率提升30%以上,运行安全保障也得到了提升,值得推广。