空间站运行控制任务规划体系方案研究
2019-03-07邹雪梅
李 剑,邹雪梅,王 成
(北京航天飞行控制中心,北京 100094)
1 引言
空间站作为寿命大多长达10余年的在轨航天器,其运营管理任务的顺利实施需要在其全寿命周期内进行不间断的任务规划[1]。空间站运行控制任务规划是指针对空间站某一任务周期内的飞行任务(空间站平台操作、有效载荷试验和航天员驻留等),根据飞控任务需求,通过一定的规划手段,获得空间站在轨运行的飞控计划和操作指令序列。
自上世纪80年代起,美国就展开了空间站运营任务规划概念模型的相关研究,并经过一系列的工程论证,初步形成了任务规划概念体系框架[2-3],包括载人航天任务的分布式规划概念[4]、基于空间站运营任务规划基准规划周期的分层规划概念[5]及各层规划的具体规划内容及执行流程[6]等。
经过40余年的空间站建造发展[7],美、俄等国已掌握了相对成熟的空间站任务规划技术,研制出功能较为完善的任务规划系统[8-9],并经过长期实际在轨运营的应用检验,其工程实用性和可靠性都已达到领先水平,为空间站运营管理提供了强大的技术支撑。
国际空间站运行控制任务规划由分布在全球的各合作国规划机构共同协作开展,其运行控制任务规划流程如图1所示[5],主要体现了“分层规划、分布式协同、集中式管理”的思想。
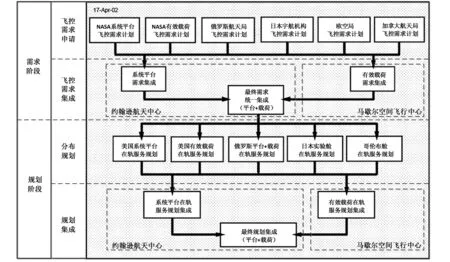
图1 国际空间站任务规划流程[5]Fig.1 The mission planning process of International Space Station[5]
我国经过神舟飞船系列任务以及空间实验室任务,已经掌握了载人航天短周期集中式任务规划技术,并形成了基于“计划工作模式”的任务规划方法[11]。根据我国载人航天工程战略布局,将于2020至2022年完成空间站建造任务[10],之后进入空间站运营管理阶段。在空间站运营管理阶段,将会面临航天员长期在轨驻留、多航天器协同飞控、多领域载荷统筹规划、飞控需求快速迭代以及在轨资源优化配置等新需求,目前亟需研究面向未来空间站任务的运行控制任务规划体系,并在统一体系架构指导下推进相关系统建设。
2 规划体系总体设计
2.1 规划需求
从我国空间站任务特点出发,其运行控制任务规划需求应主要包括以下6个方面:
1)在轨航天器多、协同控制复杂,存在多种组合体飞行模式,需要对在轨航天器实施多目标整体规划。
2)地面参试系统和专业领域多,需要运控中心与各支持中心开展高效协同规划,并建立多边协调机制,完善分布式协同技术手段。
3)飞控资源有限、飞控需求多样,需要优化配置资源、合理安排约束,在满足飞控需求的基础上,充分发挥空间站应用效率。
4)天地往返和货物补给常态化后,任务准备周期缩短、规划任务繁重,需要提高任务规划准备和验证效率。
5)针对空间站应急响应需求及各类测控网和平台故障等突发情况,提高快速实施应急处置的能力,需要快速重规划,保障空间站安全稳定运行。
6)空间站在轨试验任务的控制需求多样、方式灵活,需要拓展传统计划遥控方式,探索基于闭环实时控制的遥控作业,发展基于远程授权控制的载荷遥操作技术。
2.2 建设目标
借鉴国际空间站成功的运营管理经验,我国空间站运营管理可初步划分为四个层次:战略规划、中期规划、任务规划和实施规划,其中空间站运行控制任务规划属于实施层规划,为了满足上述空间站运行控制任务规划需求,其体系架构及其系统建设可设定为以下6项目标:
1)满足空间站四层规划体系中实施层规划的任务要求;
2)满足空间站任务的飞控组织指挥和操控模式要求;
3)满足空间站任务长寿命周期内的多样性、扩展性任务需求;
4)提高任务规划效率和自动化水平,降低人工成本;
5)提高任务规划的正确性和可靠性,降低风险成本;
6)提高任务规划的灵活性和兼容性,降低维护成本。
2.3 体系结构
空间站运行控制任务规划体系如图2所示,包括:分布式任务规划工作模式、分布式任务规划接口规范、运行控制信息管理平台以及分布式任务规划系统(1+N)等4个部分。
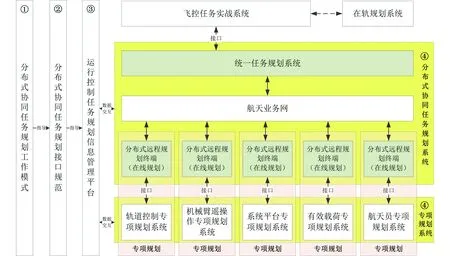
图2 空间站运行控制任务规划体系结构Fig.2 The mission planning architecture for operation control of the CSS
1)分布式任务规划工作模式(图2中①):明确了运控中心和各支持中心(分布式专项规划系统)在运行控制任务规划中的职责分工和工作流程。
2)分布式任务规划接口规范(图2中②):明确了任务规划过程中各参与单位数据交互的标准规程、数据类型、接口定义和交互关系。
3)运行控制信息管理平台(图2中③):该平台提供基于Web服务和实时数据分发服务的信息化网络环境。
4)分布式任务规划系统(图2中④):该系统由空间站运控中心的“分布式协同任务规划系统”和各支持中心的“专项规划系统”共同组成。
上述工作模式与接口规范是顶层的指导性文件,信息管理系统和分布式任务规划系统是需落地的建设项目。
3 任务规划工作模式
3.1 工作阶段划分
空间站运行控制任务规划需要对有限飞控资源进行优化配置,对各类飞控事件进行统筹安排,最终获得满足飞控任务需求的飞控计划安排。空间站运行控制任务规划业务流程上承任务层规划,下接飞控实施,需要在工作计划、规划粒度、迭代周期上做好上下游业务衔接。
任务层规划由空间站运营规划与管理中心组织编制,对单次载人飞行任务周期内的在轨事件进行编排,以月为单位明确主要在轨操作,从任务前18个月开始制订,前12个月发布基线方案,并根据需求更新,发射前6个月明确任务状态。
运控中心结合上述任务层规划的迭代周期以及飞控任务特点,将一个任务周期的规划过程划分为三个阶段:规划建模阶段、射前规划阶段和实施规划阶段,如图3所示。射前规划阶段和实施规划阶段基于“分层规划”思想,包括事件层规划和操作层规划。
1)事件层规划
事件层规划将飞控事件作为整体,统筹协调各领域飞控需求与可用资源和环境约束之间的关系,以及各飞控事件之间的资源竞争关系,明确各飞控事件的资源配置和日程安排。事件层规划需要对有限资源进行优化配置,对冲突事件进行优化排解,是任务规划的关键环节。
2)操作层规划
操作层规划将飞控事件模型中的具体飞行程序和操作逻辑进行展开,在指令和操作层面进行优化编排和冲突消解。操作层规划结果面向飞控实施的最终可执行文件,包括指令计划、注入安排、遥控作业、在轨操作程序以及协同工作程序等。
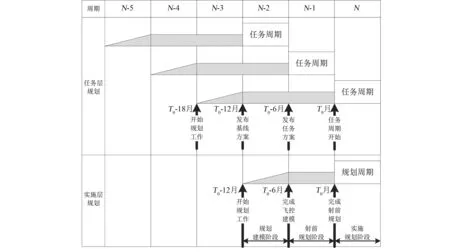
图3 空间站任务层和实施层规划周期示意图Fig.3 The planning period for pre-increment planning and increment execution planning of the CSS
3.2 规划建模阶段
规划建模工作一般在一个任务周期开始前1年启动(此时任务层规划第一版基线方案已经发布,各项在轨试验安排已经初步明确),任务开始前6个月结束(此时任务层规划最终任务方案已经发布),为期半年。空间站运控任务的规划模型主要包括飞控基础模型和飞控事件模型。
3.2.1 飞控基础模型
飞控基础模型用于描述各类飞控资源和约束条件的数学和物理特性,包括航天器能源模型、测控资源模型、链路带宽模型、航天员人时资源模型、平台设备负载能力模型以及轨道约束条件模型等。飞控基础模型一般是空间站系统、航天员系统以及测控通信系统的内在固有特性(客观能力),具有一定的稳定性,一般在规划系统的建设阶段完成相关建模工作。
3.2.2 飞控事件模型
飞控事件是空间站运行控制的基本任务单元,是飞行控制任务过程中为了达到一定的飞行试验目的而采取的一个在时间上连续、在过程上完整、在功能上独立的一系列操作或活动,飞控事件模型即是对一段相对独立飞控过程的逻辑封装。
飞控事件模型具有树形数据结构,如图4所示。一个飞控事件由多个动作和子事件组成,动作是针对某类资源占用或状态约束的封装,其内部具有统一的资源占用和约束依赖性。动作与动作之间,具有一定逻辑关系和时序关系,同时也具有较大的优化调整空间。动作则由一系列指令和操作组成,一般具有固定的时序逻辑,具有很小的优化调整空间。因此,事件层的规划粒度是“动作”,操作层的规划粒度是“指令/操作”。
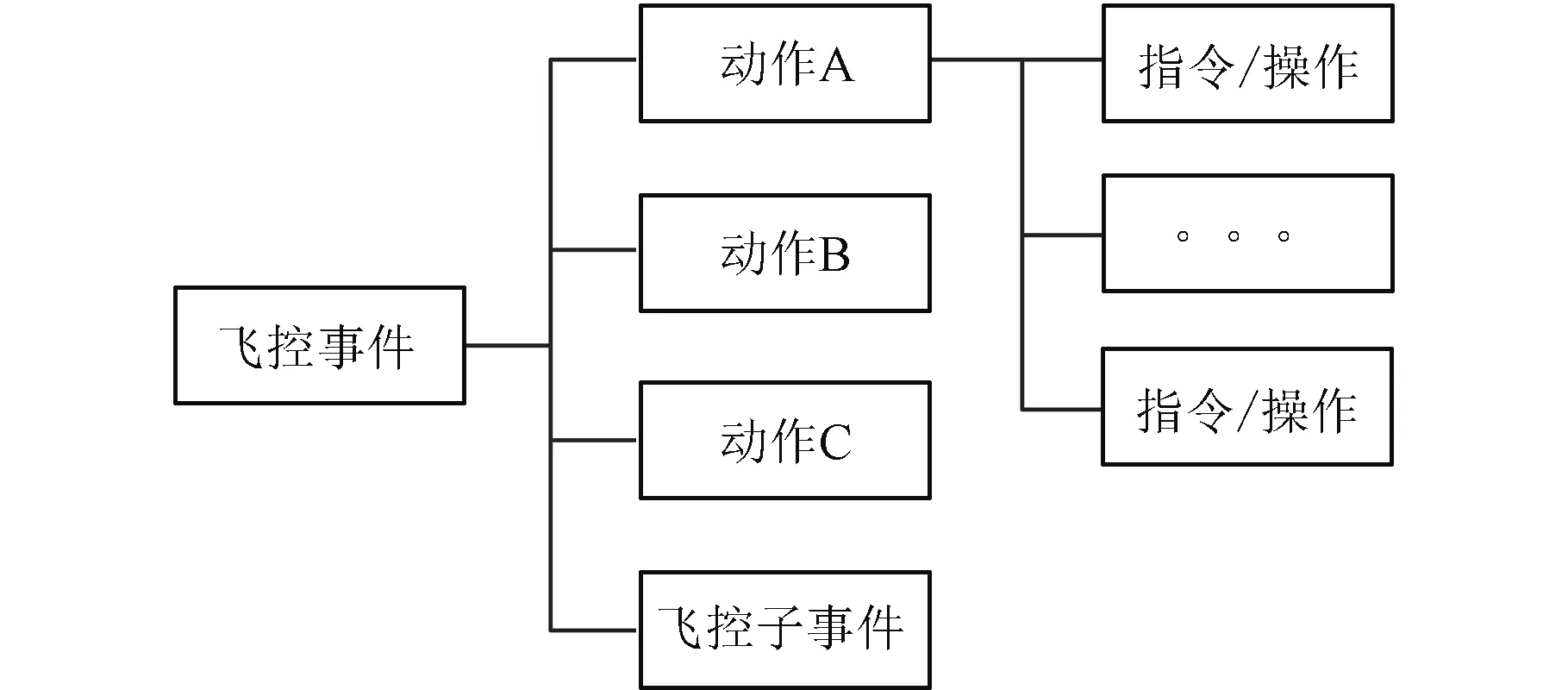
图4 飞控事件概念模型Fig.4 The conceptual model of flight control events
一般情况下,一类飞控事件只对应一个飞控事件模型,模型需要对飞控事件内部稳定部分进行封装,对外部变化部分开放接口。在任务规划的“飞控需求申请”中,各支持中心只是通过数据接口明确相关模型的参数设置,从而将某一飞控事件模型实例化。
3.2.3 规划模型会签确认
完成上述飞控基础模型和飞控事件模型建立后,运控中心与各支持中心需对各类模型进行测试、评审、会签和最终确认,确保模型的正确性和权威性。

图7 空间站日常运营管理期间任务规划时间安排Fig.7 The time arrangement for mission planning during the space station daily operation management
3.3 射前规划阶段
射前规划阶段一般在任务开始前6个月启动,在任务层规划结果(已经明确了所有飞控事件的月计划安排)的指导下开展,在任务开始前完成规划,其工作流程如图5所示。
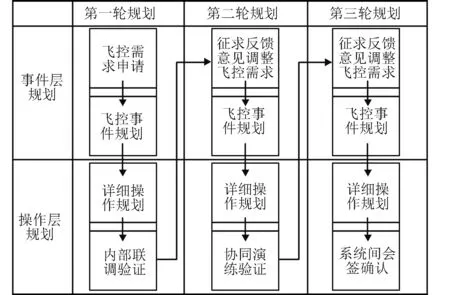
图5 射前预规划阶段工作流程示意图 Fig.5 The workflow of the pre-launch planning
3.4 实施阶段规划
在空间站日常运营管理期间,运行控制任务规划采用短周期迭代更新的方式实施。为了匹配测控资源申请周期,该阶段规划周期设定为一周;考虑规划准备期间的系统间迭代交互工作,需提前3周启动规划工作,其工作流程如图6所示。一次典型的空间站日常运营管理期间任务规划时间安排如图7所示。

图6 实施规划阶段工作流程示意图Fig.6 The workflow of increment execution planning
4 系统间接口规范设计
空间站分布式任务规划接口规范主要包括数据传输规程、接口形式定义和数据交互三个方面。
1)数据传输规程
数据传输规程描述了数据传输的协议约定,在链路层采用以太网协议,在网络层采用IP协议,在传输层采用TCP和UDP协议。对于应用层,需要基于传输数据类型选择不同的数据交互协议,Web业务数据采用HTTP协议,实时业务数据采用PDXP协议(包数据交换协议),非实时业务数据采用FEP协议(文件交换协议)。
2)接口形式定义
系统接口形式包括三种类型:一是模型接口,该接口既是系统软件集成接口,也是模型设计的人机接口,采用结构化的专用模型描述语言作为接口规范;二是算法封装接口,该接口仅是系统软件集成接口,采用软件组件技术作为接口规范;三是数据交互接口,该接口是数据的结构化定义,采用XML作为接口描述标准。
3)数据交互关系
系统数据交换关系包括三个方向:一是分布式任务规划系统之间的数据交互;二是任务规划系统与飞控实战系统的数据交互;三是任务规划系统与运营管理任务层规划系统的数据交互。
5 运行控制信息管理平台
空间站运控任务信息管理平台是分布式任务规划系统互联互通的基础,用于承载业务流程流转、任务数据传递和状态确认管理,并应具备开放扩展能力,能够兼容基于标准接口接入的国际合作机构的规划子系统。信息管理平台的系统构成设计为两个部分:
1)基于C/S架构的传统试验任务数据实时分发系统,确保各系统之间业务数据流转的可靠性和实时性。
2)基于B/S架构的Web系统,为业务数据管理、状态确认、审批放行等有人参与环节提供便捷管理手段。
6 分布式任务规划系统
基于“分布规划、集中管理”的思路,运控中心的分布式协同任务规划系统设定为主要负责飞控需求集成和最终规划发布工作,分布式部署在各支持中心的专项规划系统主要负责各自业务领域的任务规划工作。
6.1 运控中心分布式协同任务规划系统
运控中心分布式协同任务规划系统包括部署于运控中心的本地终端(图2中,统一任务规划系统),以及分布部署于各支持中心的远程终端。各终端通过信息管理平台进行数据同步,实现实时在线协同规划设计。为了提高任务规划系统的灵活性和可扩展性,运控中心统一任务规划系统划分为4个功能层,如图8所示。
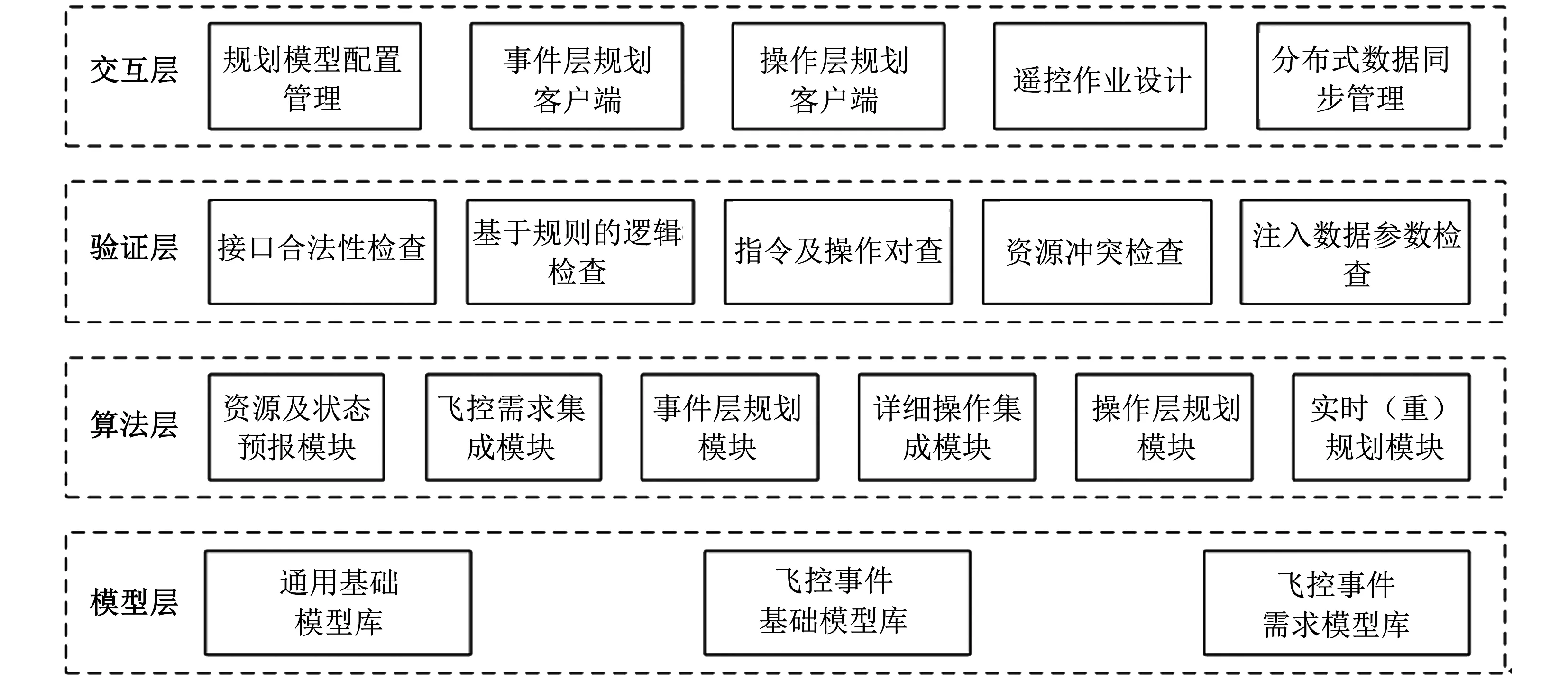
图8 空间站运行控制分布式协同任务规划系统结构Fig.8 Architecture of distributed collaborative mission planning for the space station operation control
1)模型层
包括3个规划模型库:针对飞控资源和状态约束进行建模的通用基础模型库,针对具有实时重规划需求的关键平台控制事件的基础模型库,针对各支持中心提交的飞控事件需求建立的模型库。三种模型库均基于标准接口设计,具备可扩展性,能够集成第三方规划模型。
2)算法层
包括6个算法功能模块,分别解决某一方面的规划求解问题。
3)验证层
包括5个检查验证模块,对外部输入数据、算法层产品进行合法性、正确性验证,并提供的日志信息和调整建议。
4)交互层
包括5个人机交互模块,同时实现本地与远程终端的数据同步。
6.2 支持中心专项任务规划系统
空间站任务各支持中心需要根据各自专业领域建设各自的专项任务规划系统,并基于标准接口规范和信息管理平台与运控中心任务规划系统实现数据交互和协同规划。
主要业务领域的专项任务规划系统设定如下:
1)轨道控制专项规划系统:主要完成空间站轨道控制策略的规划计算,并将轨道控制策略封装成统一的飞控需求和约束模型。
2)空间站平台专项规划系统:主要完成空间站平台各分系统的在轨管理和控制的任务规划,如平台巡检、热控管理、环控管理、GNC状态维护以及在轨维修等任务。
3)航天员专项规划系统:主要完成航天员相关的事务规划,如航天员作息起居、航天员医学试验等。
4)有效载荷专项规划系统:主要完成所有在轨有效载荷的工作计划和操作安排,并根据空间应用系统的接口约定,在资源约束包络内对各类载荷工作进行规划。
5)机械臂遥操作专项规划系统:主要完成空间站机械臂地面遥操作相关的控制事件规划,形成基于标准接口的飞控需求模型和详细操作序列。
6)空间站在轨规划系统:该专项规划系统部署在空间站,通过天地IP业务数据接入分布式协同任务规划系统,航天员可通过该系统参与部分飞控需求和规划结果的调整与确认。
7 结束语
本文提出了一种我国空间站运行控制任务规划的基本体系架构方案,相对于载人航天传统“计划工作模式”任务规划方法[11],在分布协同、智能规划、开放兼容和信息化管理等方面有一定突破,可为我国空间站运行控制任务规划系统建设提供参考。
