一种用于月面着陆的知识辅助单脉冲前视成像方法
2019-03-07陈洪猛鲁耀兵孙晗伟易晓丽穆贺强
陈洪猛,鲁耀兵,刘 京,孙晗伟,易晓丽,穆贺强
(北京无线电测量研究所,北京 100854)
1 引言
月球探测是人类进行宇宙探索的开始,可以大大丰富人类对外太空世界的认识。特别是月球自身蕴含的丰富矿产以及得天独厚的地理优势,使得科学家们对于月球的研究和开发表现出极大的兴趣[1-3]。早在20世纪60年代到70年代[4-5],美国和前苏联这两个超级大国就开展了激烈的太空军备竞赛,并极大地促进了探月技术的发展。近年来我国陆续开展了载人航天工程和探月工程,并且在相关方面进行了大量的研究工作[6-8]。
月面具有月海和高地两种典型月貌,其中月海约占全月面的17%。由于外天体撞击及太阳辐射,月海和高地中还分布着壑谷、陡坡以及陨石坑,这给月球车等探测器的安全着陆带来了很多挑战。月面地形是影响载人着陆安全的关键因素之一,可能引起着陆器倾斜、结构损坏甚至倾覆。因此选取平坦安全的着陆区,进行实时在线的地形探测和障碍规避是月面着陆的一项关键技术。早期的月球着陆探测任务主要通过航天员的观察和操纵实现着陆[9],激光扫描仪可以实现对着陆区域的成像,但在其工作时刻需要满足着陆器稳定悬停的条件。光学敏感器可以实现对着陆区域的障碍物识别,其中立体视觉法和纹理分析法是常用的技术[10]。Horn等[11]提出一种利用单幅图像的地貌重构方法(Shape from Shading, SFS) 求解像素点的相对高程,吴伟仁等[12-14]利用单幅图像进行月面着陆障碍识别与安全区域选取。雷达作为一种对地观测的重要传感器系统,具有全天候、全天时、高分辨的特点[15]。由于着陆器在着陆过程中主要工作在前视或下视探测的模式,因此,我们拟将雷达前视探测技术用于着陆器的月面着陆过程中。
针对传统的单脉冲雷达系统前视分辨率不高的问题[16],本文提出一种适用于月面着陆的知识辅助单脉冲前视成像方法,该方法可以提高对月表信息的成像精度和分辨率,从而着陆器在着陆过程中能避免月表的壑谷、陡坡和陨石坑等区域,实现月面的安全着陆。
2 知识辅助的单脉冲前视成像
假设着陆器相控阵雷达与地面杂波块之间的几何构型如图1所示。着陆器以速度V沿y轴正方向水平飞行,高度为H;天线波束的斜视角为θ,相对水平方向的俯仰角为φ。假设雷达有两个接收通道,A和B为等效的两个子孔径天线的相位中心,阵元间距为D。设A和B组成的全孔径相位中心为C,O是天线波束照射区域的中心,波束照射范围内地面某一杂波散射体用P表示,则用R0表示全孔径相位中心C到天线波束照射中心O的距离,R1表示全孔径相位中心C到点目标P的距离,R2和R3分别为子孔径A和B到点目标P的距离。

图1 机载雷达观测几何构型 Fig.1 Geometrical configuration of airborne radar
假设雷达发射线性调频信号(LFM),如式(1)所示:
(1)
其中τ为快时间,fc为发射雷达信号的载频,γ为线性调频率,Tp为脉冲持续时间,rect(τ/Tp)表示归一化的矩形函数,经过距离压缩和距离走到校正之后,两个天线接收到的回波信号可分别为式(2)、(3):
(2)
(3)
其中si(τ,t)表示第i个天线接收到的回波信号,Ta=Na·Tr表示相干积累时间(CPI),Tr表示脉冲重复周期(PRT),Na表示方位向的相干积累脉冲数。
在理想条件下,考虑到R3-R2=Dsinθ,以场景中心参考点O所在的距离做运动补偿。设波束控制信号决定的电线波束指向为θ0,目标位置在θ=θ0+δθ处,δθ小于半个天线波束半功率点,此时通道1与通道2之间的相位误差φ可以写成式(4):
(4)
通常情况下φ0经过天线阵中移相器相移的补偿之后,实际上送到和差比较器去的两个接收单通道的相位差为δφ,因此经过移相器补偿之后的和差两路信号变为式(5)、(6):
散射点目标的达到角度估计(Direction of Arrivals, DOA) 通常采用归一化单脉冲曲线来测得,即差通道信号与和通道信号的归一化比值曲线如式(7)所示:
(7)
此时,散射点的到达角为式(8):
(8)
其中Kim表示K的虚部。从上面的分析可知,我们可以绘制每个可能目标的波达方向(DOA)的单脉冲曲线(Monopulse Curve, MPC),即可求得空间所有点目标的位置。然而,在实际情况下,MPC曲线是非理想的,直接采用测得的MPC曲线进行单脉冲成像,会致单脉冲成像性能大大降低。接下来,我们将具体分析由于接受通道1和2的不一致性所引起的单脉冲成像误差下降的问题。
由于雷达接收机通道间的不一致性,很难满足和差通道矢量正交的条件。假设雷达接收机两个通道的不一致性可以建模为式(9)~(10):
(9)
(10)


图2 不同的矢量合成示意图对比结果Fig.2 Comparison of different dual-channel vector synthesis results
因此,以场景中心参考点O所在的距离做运动补偿,并作化简,我们可以得到实际情况下的MPC曲线如式(13)所示:
(13)
进行欧拉展开,如式(14)所示:
(14)


为了具有通用性,我们只对最终的和差通道信号进行补偿,而不考虑和差通道合成之前的情景,对式(14)进行合并化简,可得式(15):
(15)
其中,
然后,我们将进行相位补偿,如式(16)所示:
(16)
其中,φcom是相位补偿因子,可得式(17):
(17)
最后经过相位补偿之后,相位条件满足式(18):
(18)
经过相位补偿后,最终的MPC曲线为式(19):
(19)
由于本文方法与传统方法的主要区别在于考虑了接收通道之间的相位误差,而相位误差的估计可以利用微波暗室的测量结果进行估计,相位误差的补偿主要是对数据进行一个相位因子的相乘操作,这个相位因子可以提前以正弦、余弦表的形式存储在处理芯片的内存中,并且单纯的乘法操作对处理芯片而言占用时间很小,相较于每次的单脉冲成像处理时间可以忽略,因此本文方法与传统方法的计算复杂度近似相当。
3 实测数据结果与分析
为验证本文算法的有效性,我们采用一组地球上的机载实测数据进行分析,系统参数如表1所示,雷达工作在前视成像模式。
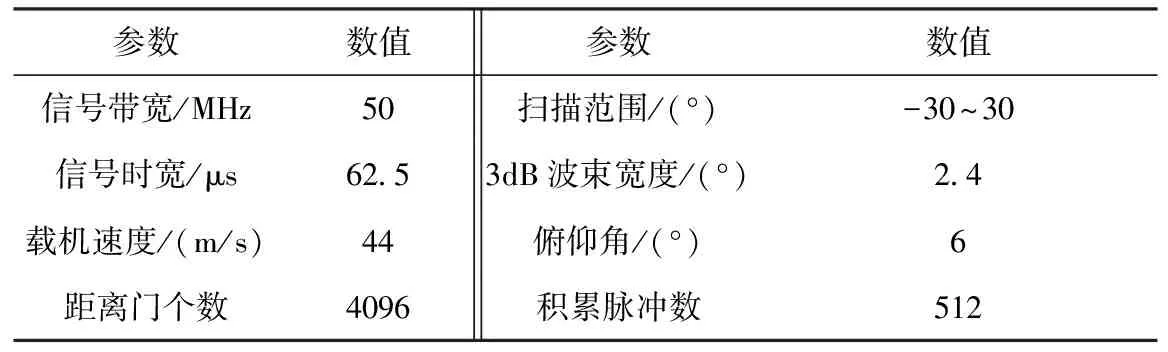
表1 系统参数
该组实验数据在录取时由于天线通道间幅相误差的影响,在前视成像时存在成像结果模糊的问题。采用本文所提出的方法,首先基于式(18)对雷达系统的天线相位误差进行估计,然后基于式(16)进行补偿,得到如式(19)所描述的通道误差补偿后的MPC曲线,最后再进行前视成像。
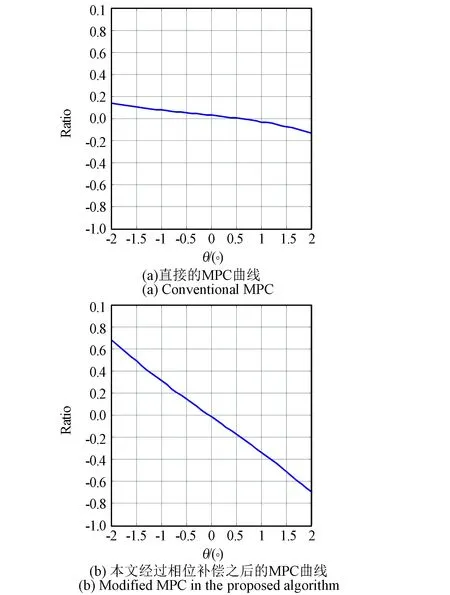
图3 天线相位误差补偿前后的MPC曲线对比Fig.3 Comparison of MPC before and after phase compensation
图3给出了实际天线系统相位补偿前后的MPC曲线对比结果。从图3(a)可以看出,由于通道误差的影响,实际的单脉冲测角曲线斜率很小,这说明单脉冲测角曲线的很大一部分能量泄漏到了实部分量,如果直接用此单脉冲测角曲线对目标进行定位势必会引起定位精度的下降。但经过相位补偿后,图3(b)的单脉冲测角曲线斜率变大,这样会改善单脉冲前视成像的结果,有利于提升着陆器月面着陆时获得高分辨的月面场景信息。
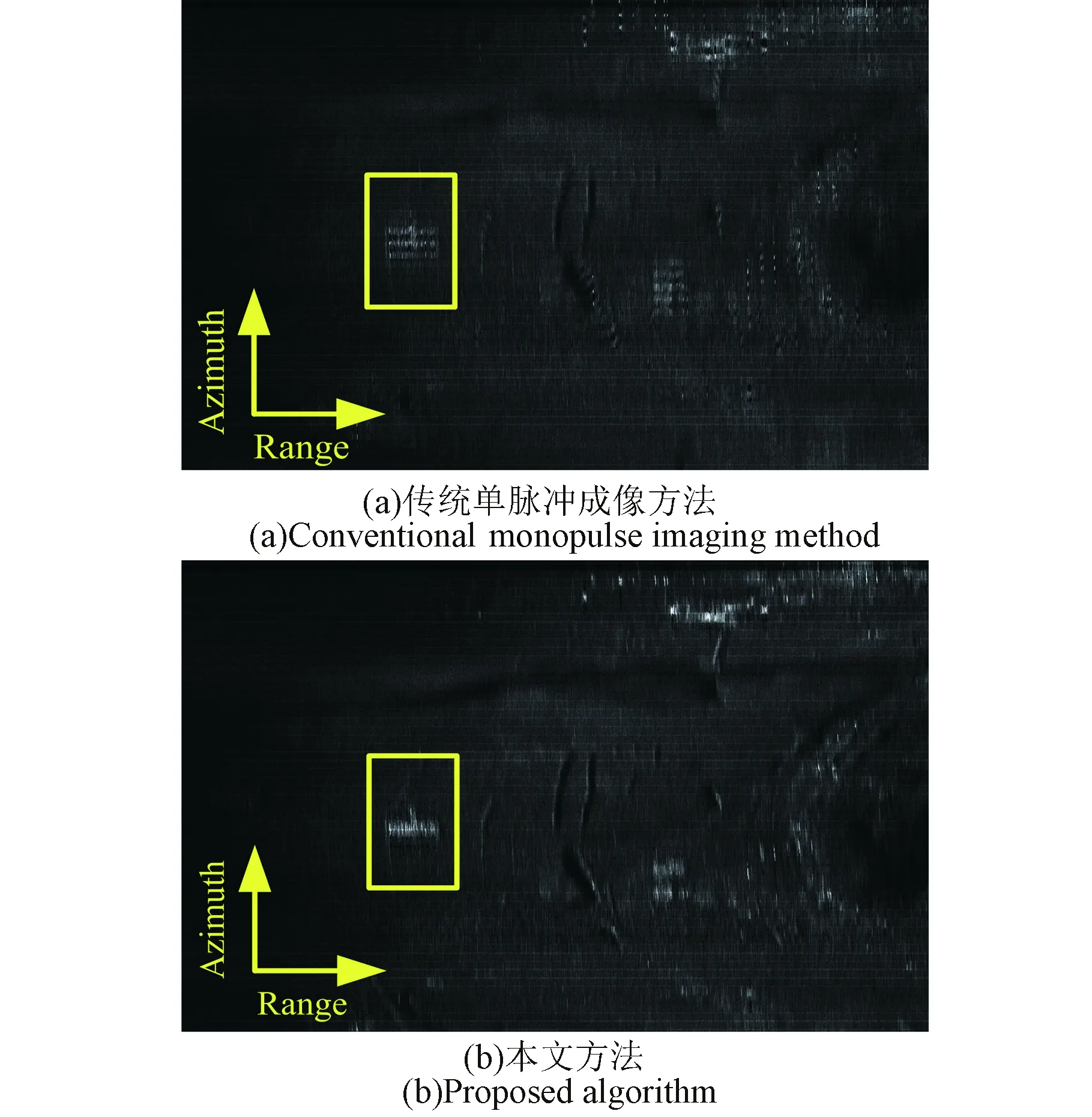
图4 传统单脉冲成像与知识辅助单脉冲成像效果对比图Fig.4 Comparision of imaging results between conventional and proposed algorithms
图4分别给出了传统的单脉冲成像结果和本文方法对比图,可以看出,虽然传统方法也可以实现对地面场景的成像,但成像场景比较模糊。特别是对于一些强散射点区域,由于测角曲线的不准确,会出现许多“鬼影”,这大大影响了对地面场景信息的识别。但对于本文方法,不仅可以对地面场景进行高分辨成像,还可以抑制强散射点的“鬼影”现象。为了进一步对比这两种方法的单脉冲成像效果,我们将成像场景中的同一个区域进行局部放大,局部放大结果如图5所示。

图5 传统单脉冲成像与知识辅助单脉冲成像效果局部对比图Fig.5 Comparision of locally imaging results between conventional and proposed algorithms
从图5(a)可以看出,传统单脉冲成像方法虽然可以实现对地面场景的成像,但是强散射区域的成像结果容易产生“鬼影”模糊。从图5(b)可以看出,知识辅助方法对地面场景的成像结果中几乎没有“鬼影”模糊现象,说明其对地面场景的成像效果更好,这主要是由于经过天线信息的辅助信息的相位补偿之后,改进的MPC曲线对复杂的成像环境更加稳健。
基于实测数据的处理结果表明,本文方法的成像效果要优于传统的单脉冲成像方法,理论上可以用于着陆器着陆过程中的月面信息实时成像。在接下来的工作中,我们将对具有月海和高地两种典型月貌的月面场景进行研究,在模拟月面的实验室环境中进行着陆器月面着陆实时成像的验证。
4 结论
针对月面着陆过程中的高分辨前视成像问题,本文将单脉冲前视成像方法引入到月面着陆过程中,并在此基础上提出了一种基于知识辅助的稳健前视成像方法。基于地球上的机载挂飞数据对该高分辨前视成像方法进行了实验验证。在地球实验中,基于知识辅助前视成像算法是在专用的信号处理平台上运行的,可以满足时性要求,理论上其分辨率可满足月面信息实时成像的要求,可应用于月面自主软着陆。
