汽车防碰撞控制系统设计与实现
2019-03-05陶新武
陶新武
摘要:科学技术的飞速提升,为新时期汽车工业的发展提供了充足的动力。目前汽车已经成为人们日常生活中最常见的交通工具,如何保障汽车行驶安全一直以来都是人们关注的热点问题。对汽车防碰撞控制系统进行研究可以大幅度的降低交通事故发生的风险,避免生命财产损失。本文将就汽车防碰撞控制系统的设计和实现进行深入的探讨。
关键词:汽车防碰撞;系统设计;纵向;转向
近些年来,随着我国汽车数量的增加,交通事故数量也呈现出增长的趋势,据统计分析,绝大部分交通碰撞事故都是因驾驶人员反应不及时造成的,很多情况下,当驾驶员发现前方存在障碍物时已经无法做到有效规避[1]。基于此,有必要依托先进的科学技术,研发汽车主动避让系统,防止交通碰撞事故的发生,从而有效的保障人们的生命财产安全。
1汽车防碰撞控制系统设计方案
1.1明确设计目标
在进行汽车防碰撞控制系统设计的过程中,首先要做的就是对设计目标进行明确,这样才能有计划、有针对性的开展设计工作。结合汽车防碰撞系统的功能,其设计目标应该分为两个方面,首先在汽车安全行驶的情况下,通过控制车辆驶进的方式为驾驶员提供辅助,从而实现对驾驶员疲劳程度的有效调节[2]。其次在汽车危险行驶的情况下,自动控制车辆进行安全避让,提高行车安全性。
1.2规划设计思路
在汽车防碰撞控制系统设计目标明确后,要在此基础上对设计思路进行科学合理的规划,本文主要研究的是汽车防碰撞控制系统的纵向制动以及转换车道两种方式,因此需要基于这两种方式制定相应的决策机制,通过决策指标体系的建立为行车过程中合理避撞方式的选择提供依据。在驾驶员无法针对交通安全隐患做出及时有效的反应时,汽车的纵向制动避撞系统可以通过自动控制尽可能的避免碰撞,或是最大程度的减轻碰撞。在无法做到有效躲避障碍物的情况下,则选择换道的方式躲避障碍物。
1.3汽车防碰撞控制系统的整体结构设计
本文所研究设计的汽车防碰撞控制系统主要包括传感器、控制器以及执行器三个部分。其中传感器的功能是对汽车自身及外部信息进行获取,具体包括汽车行驶速度、车辆位置、前方障碍物距离等。控制器的功能是根据传感器获取到的相关信息,经过一定的处理分析后选择最合理的行驶路径。执行器的功能是执行相应的操作,同时将外部交通环境的变化情况反馈到传感器中[3]。
结合上述内容,汽车防碰撞控制系统所涉及到的技术环节主要有四个:其一,信息感知环节,即通过传感器对车辆自身及其周边的交通信息进行获取,对其所处的交通环境进行实时掌握。其二,信息判断环节,即传感器将获取到的交通信息传递到中央控制系统,通过车载计算机进行处理分析。其三,车辆建模环节,即综合车辆和障碍物相关信息参数,构建汽车动力学模型,为系统控制功能的实现提供依据。其四,控制系统设计环节,在汽车动力学模型的基础上,采用一定的控制算法对汽车转向和加速度进行控制。需注意的是,在本环节所选的控制算法应该尽可能的做到简单易行。
2汽车纵向避撞控制系统设计分析
2.1总体设计方案
在汽车纵向避撞控制系统设计过程中,首先要对系统功能进行明确。汽车防碰撞控制系统设计的总体目标是通过车辆运行的自动控制,实现驾驶员疲劳程度的有效调节,辅助驾驶员安全行驶,避免交通碰撞事故的发生,基于此,纵向避撞系统的功能即是通过控制汽车纵向的运动状态,使其和其他车辆之间始终保持安全距离,以此避免碰撞事故。汽车纵向避撞系统设计方案主要由传感器、中央控制器依据执行器三部分构成。传感器用于对车辆自身及前车行车信息进行的获取,现如今比较常见的传感器为车载雷达。该系统对汽车纵向运动状态的控制主要涉及到加速、减速以及匀速三个方面,具体是通过对车辆发动机节气门开度以及控制系统压力两个方面的控制来实现的。
2.2具体设计步骤
首先,构建精准的车辆动力模型。本文采用虚拟动力学仿真软件完成车辆动力学系统模型的构建,经检验其该模型具有较好的完整性和精确性,可以对非线性的车辆动力学系统进行良好的描述,通过对车辆发动机特性参数的分析以及制动力和制动轮缸压力之间的关系建立车辆逆动力学模型。
其次,构建车辆安全距离模型。综合考虑车头距离、舒适性、路面附着系数以及驾驶员特性等多项因素,建立安全距离模型。
再次,设计控制器。在进行控制器设计的过程中,本文采用分层方法,将其控制器分为上下两个层次,上层主要是结合汽车行驶情况对期望加速度进行计算。下层则是对车辆动力学系统进行控制,实现减速、减速、匀速等功能。
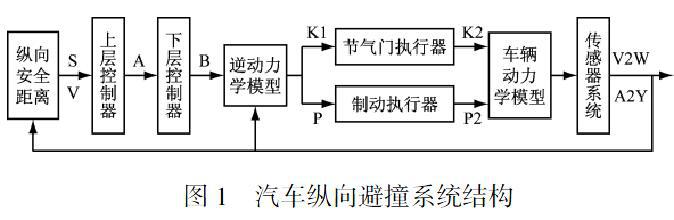
如下图所示,为汽车纵向避撞系统具体结构,它由多个子模块构成,通过多项功能的协调配合达到防碰撞的目的。其中S和Y分别代表着期望安全距离以及车辆和前车之间的实际距离,V和V2为车辆期望速度和实际行驶速度,A和A2分别为车辆期望加速度和实际加速度、B为下层控制器控制量、K1和K2分别代表着车辆的期望节气门开度和实际开度,P和P2分别代表着车辆期望制动压力和实际制动压力,W为车辆发动机加转速[5]。
在该系统下车辆行驶的过程中,系统会根据其前车的行驶状态,对自车安全状况做出分析判断,实时计算出期望安全距离,将其与实际距离进行对比,一旦后者低于前者,分层控制器就会作用于车辆动力学系统,通过节气门开度和制动压力的调节降低车辆行驶速度。
3转向防避撞控制系统设计
汽车转向防碰撞控制系统的功能是辅助驾驶员通过侧向运动进行换道,并保障这一过程中车辆行驶的稳定性,最终达到防碰撞的目标。该系统的设计步骤大体上和纵向防碰撞控制系统相同,具体包括以下内容:首先,构建转向换道动力学模型,具体是结合魔术轮胎动力学模型获得非线性车辆换到模型,在此基础上将动力学模型引入到控制器中。其次,构建换道最小安全距离模型。系統在控制车辆进行换道时,为了保障其安全性,必须保持在最小安全距离以上。本文参考纵向避撞系统最小安全距离,对多种道路条件下的最小安全距离模型进行了构建。最后,模型预测控制转向控制器。汽车转向避撞控制系统系统中采用模型预测控制转向控制器,基于控制器的计算结果制定转向控制器,保障车辆能够在保持稳定舒适的前提下通过转换车道达到防碰撞的目的。
在车辆行驶速度较高的情况下,一旦其前车出现紧急制动或是前方出现静止障碍物的情况,就需要采用换道的方式实现避撞。在系统判断需要进行换道避撞时,首先是通过安全距离模型进行计算和判断,在此基础上确定最佳的换道路径,之后通过换道控制器控制汽车实现换道。
结语:
综上所述,通过汽车防碰撞控制系统的设计和应用可以有效的降低交通碰撞事故发生的概率。本文基于设计目标和思路,从纵向避撞和换道避撞两个方面入手对系统设计进行了深入研究阐述,希望可以为实际设计工作提供一定的参考。
参考文献
[1]郭东晖.汽车行驶中防碰撞智能控制系统设计[D].兰州交通大学,2018.
[2]胡瑜.汽车防碰撞系统的应用与研究[J].机械工程与自动化,2010(04):214-216.
(作者单位:杭州锣卜科技有限公司)
