一种提高无线电测距定位精度的有效方法*
2019-03-05何世彪孙宝刚
何世彪,孙宝刚,张 力
(重庆人文科技学院 计算机工程学院,重庆 401524)
0 引 言
位置信息是一种特别重要的敏感信息,在工程实践和社会生活中具有广泛的应用,特别是在导航和敏感目标跟踪定位方面,更具有重要的意义。“万物智联”的物联网时代,利用无线电的导航定位技术,已经用于社会的各个方面。最典型的例子是全球卫星定位系统(Global Position System,GPS),而GPS在室内、坑道、丛林等遮挡环境中,由于接收不到卫星信号,而不能正常定位。在救灾、货物仓储、无线传感器网络中,对定位的精度要求很高,GPS的定位精度也达不到要求,因此研究高精度的无线电定位技术便成为研究的热点。对于无线电测距定位来说,定位建立在测距的基础上。提高定位精度,关键是提高测距精度。目前,利用超宽带无线定位技术,测距精度可达到厘米级。但是,理论的精度不等于实际的工程精度。由于无线电在传输过程中存在多种不确定因素,如噪声干扰、遮挡、收发两地的时钟不一致以及时钟漂移、处理带宽和信噪比等,因此一般的无线测距定位系统都存在着系统误差。系统误差是影响测距定位精度的主要因素,这也被大量的测试数据所证实。如何减小或消除系统误差,是无线电测距定位系统需要研究和解决的技术问题。在研究超宽带无线电通信、定位技术的过程中,提出利用已知位置锚点的测距数据估计出系统误差,再用该系统误差对未知位置的测距数据进行误差修正,从而大大减小测量的系统误差。试验证明,该方法可以明显提高测距精度。
1 无线电测距定位的原理
无线电定位是利用多个已知位置的基站对移动目标进行测距,再利用得到的距离值解出移动目标的位置。由于电波在空中的传播速度是已知的,只要测量电波在基站和移动目标之间的传播时间,则可以求出两站之间的距离。目前,基于传播时延的测量方法主要有到达时间(Time of Arrival,TOA)法、到 达 时 间 差(Time Difference of Arrival,TDOA)法和往返到达时间(Round Trip Time of Arrival,RTTOA)法[1]。
1.1 TOA法
TOA法使用信号传播时延的测量值计算从接收机到发射机的距离。从BSi到移动终端的信号传播距离可以沿着传播路径P进行积分,即通过对光速c在该路径(发送时刻T0和接收时刻Ti)上的积分得到,于是有:

对于双向测距来说,基站在T0时刻向移动终端发送测距报文,移动终端应答后在T1时刻返回,若移动终端的应答处理时延为ΔT,则两站之间的距离为:

假设信号采用的是LOS(Line of Sight,视距)传播,信号传播距离di决定了从移动终端MT到基站BSi的等距离点。如果考虑二维情形,则这是BSi周围半径为di的圆的定义。为得到唯一的位置,必须测量与多个基站之间的距离。对应圆的交点能够提供移动终端的唯一位置。图1演示了二维情形中的TOA原理。两个圆的交点会产生两个可能解,靠第3个基站的距离测量值解决歧义问题。

图1 二维情形中的TOA原理
从移动终端到N个基站的距离测量值包含N个非线性方程组。方程组的未知项是MT位置(x,y),即有:
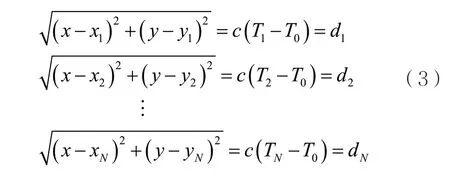
这里,(x1,yi)表示BSi的位置。Ti-T0对应于信号传播距离di的信号传播时延。
原理上,2个圆相交点便可确定移动站的位置。但是,由于2个圆的交点有2个,因此为了消除模糊,需要有3个圆相交来确定移动终端位置,即需要3个 基站对同一移动终端进行测距,从而确定3组方程,解出移动终端的位置(x,y)。
实际测量中,距离di的测量值通常包含噪声。因此,式(3)的解一般不存在,如图1所示的虚线。这里传播时延的测量值会受到误差ε的影响。从几何上看,提供了虚线圆。
即使方程组是超定的(即方程数大于未知量),无法求解的概率也会增加。通常的做法是考虑等价方程组:

每个方程引入了一个误差值εi,MT位置的估计值为:

通过最小化总平方误差得到。
1.2 TDOA法
将MT和BS的位置分别表示为(x,y)和(xi,yj)。
与TOA方法类似,ΔTi,j的测量值包含噪声。此外,可能存在方程数大于未知量的情况。与TOA原理类似,此类方程组可以使用最小二乘法来求解。
TDOA原理是另一种基于信号传播时延的方法。TDOA的基本思路是对信号传播时延差进行测量。假定在时间点T0两个信号分别从两个基站i和j发射出来,接收端分别在时间点Ti和Tj接收到来自基站i和基站j的信号。对应传播距离差为:
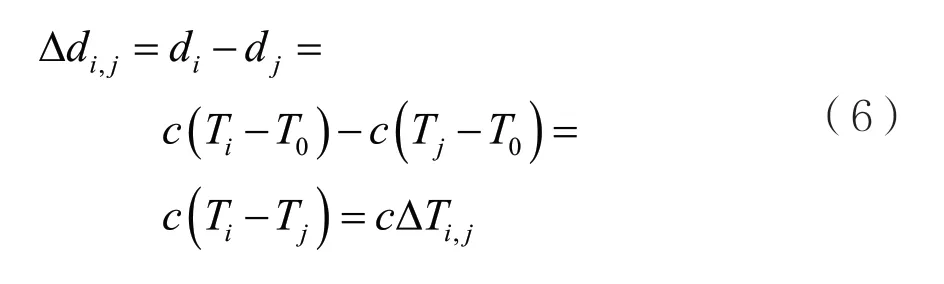
可根据传播时延进行计算。显而易见,传播距离差取决于信号传播时延差。考虑到构建差,除去信号传输的未知时间,且由于BS和MT处的时间尺度不同,因而不会面临任何问题。可用于计算信号传播时延差的这两个时间点都可以在MT处进行测量,并由同一时基产生。
TDOA的信号传播时延差测量值代表着所考虑BS的等价距离差对应点,这是二维情形中的双曲线或三维空间中的双曲面定义。因此,通常将TDOA方法称为双曲线定位。
包含的N-1个非线性方程组为:

1.3 RTTOA法
与TOA方法类似,往返到达时间是一种圆形定位方法。RTTOA对两个实体之间的信号往返时延进行测量,因而需要双向通信能力,流程如图2所示。
这里,RTTOA测量是由MT在时间点T0上启动的,并根据MT的时间尺度tMT进行测量。在时间点T1上,信号被第二个终端(即BS)所接收。假定MT和BS的时间尺度tMT和tBS不同,但具有恒定差,即tBS-tMT=Δt。于是,MT和BS之间的信号传播距离变为:

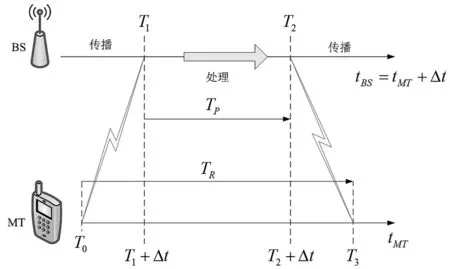
图2 二维情形中RTTOA原理
T1+Δt表示相对MT时间尺度的时间点T1。在相对于BS时间尺度的时间索引T2处,另一个信号开始从BS发回MT。在时间T3上,信号被MT所接收。
假设两次信号传输之间的几何形状不发生变化且信道具有互易性,这意味着d2,1=d1,2,且有:

它取决于两个时间差:往返时间TR=(T3-T0)可在MT处进行计算,TP=(T2-T1)是在BS处测量的信号处理时间。两个时间差都根据各自的时基来确定。因此,信号传播距离d与两个时间参考之间的未知差Δt无关。
2 测距误差和精度问题
诸如TOA和TDOA等基于传播时间的定位方法,需要来自于不同发射站的信号接收时间的精确估计值,而精确的时间估计受到噪声与干扰、传播遮挡、传输带宽、时钟漂移、时钟精度和同步精度等因素的影响。
2.1 克拉美罗(Cramer-Rao Lower Bound,CRLB) 理论限
文献[2]通过推导,给出了在加性高斯白噪声情况下的克拉美罗下限为:
显而易见,克拉美罗下限取决于噪声功率。此外,信号特性也会影响克拉美罗下限。
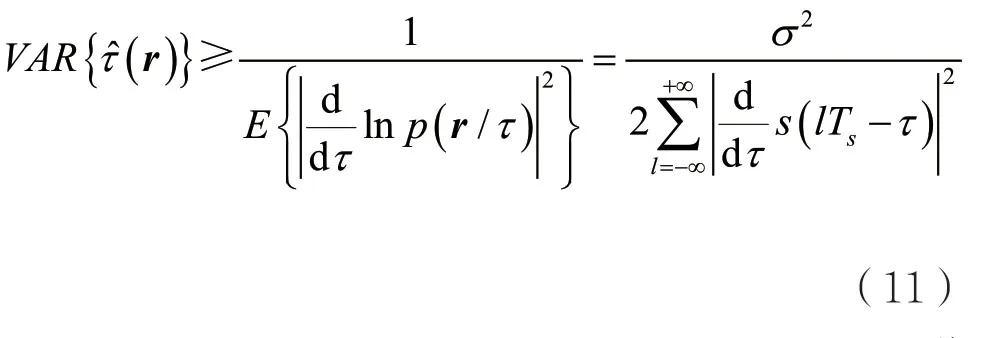
对于频域而言,使用抽样时间Ts=1/B对连续信号进行抽样,得到频域的克拉美罗下限为:
σ2为噪声方差,p(r/τ)为多元高斯概率密度函数,s(lTs-τ)为信号的时域抽样值,S( f )为信号的频谱。更进一步,经过简化得到高斯白噪声下的克拉美罗下限为:

其中,β是有效带宽,SNR为信噪比,测距误差为 c× σ (ˆτ),c为光速。
例如:对于具有脉冲宽度为1 ns的二阶微分的高斯脉冲,在SNR为5 dB时,TOA估计CRLB限小于1 cm,即测距精度为:

理论上,测距精度取决于信噪比和带宽。要想获得高的测距精度,需要更大的测距信号带宽,即信号的码元时间要非常小。这对于同步和同步精度的要求非常高。
对于无线测距定位来说,由于遮挡而出现的没有直视波的情况,是影响测距精度的最大因素,这方面也有一系列的研究成果。本文考虑的是存在直视波的情况。
从测量误差来说,主要有两类:一类是随机误差,一类是系统误差。对于随机误差,通过对多次测量求平均,可以消除随机噪声的绝大部分影响,而系统误差则需要通过一定的方式进行消除或者校正。
2.2 减小测距系统误差的有效方法
根据研究超宽带测距定位的经验和实测数据来看,不同的测距定位系统均存在系统误差,且系统误差是影响测距定位精度的主要因素。不同的应用场景,对于无线测距定位系统误差的消除或校准有不同的方法,但最基本的原理是利用已知坐标点的测量数据估计系统误差,从而在未知位置的测量数据中减去该系统误差。下面具体论述提出的减小测量系统误差的方法。
场景:在超宽带测距场景中布置一定数量的已知准确位置的锚点,利用这些已知位置的锚点,对待测目标进行测距定位。
系统误差修正原理:如图3所示,利用已知位置的锚点,对待测目标(S)进行测距定位,得出待测目标的初步位置。有了待测目标的具体位置,就知道该目标与系统中已知位置的锚点最近。图3中假设为F,利用系统中其他锚点(图中,A、B、C、D等)对这个已知位置的锚点(F)进行测距。由于锚点A、B、C、D以及F的位置已知,则可以计算出A-F、B-F、C-F、D-F的真实距离,那么测量的距离与真实距离的差值是已知的,即系统误差。
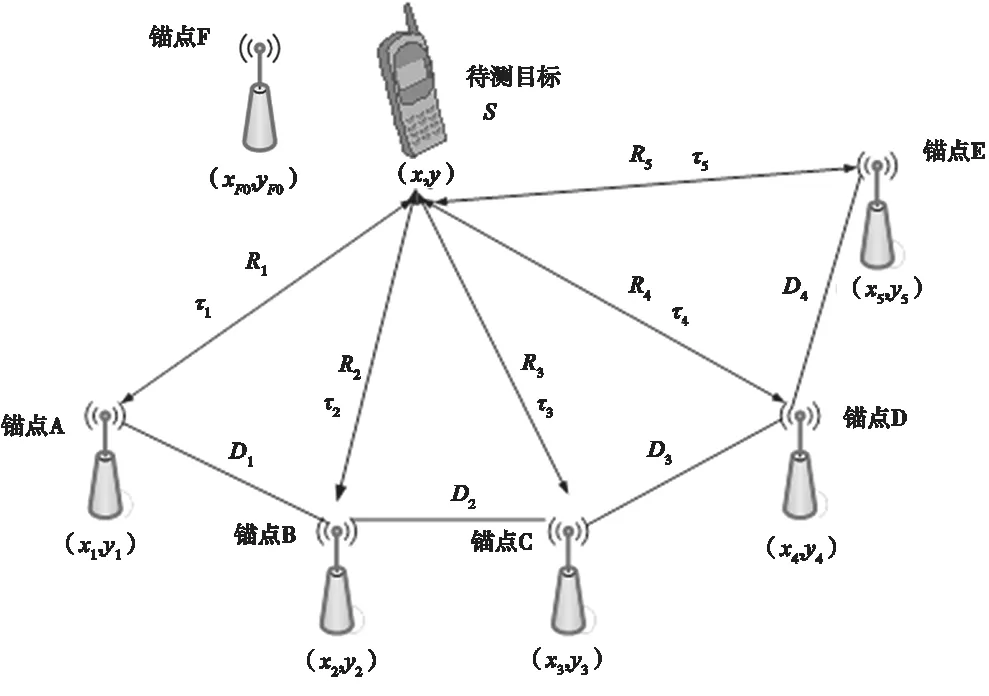
图3 利用已知位置锚点修正系统误差方法
以A-F为例,它的测距误差记为ΔRA-F,其相对误差为ΔRA-F/RA-F。在A对S的测量中,得出测量距离为RA-S。利用A-F测量得出的系统误差对该测量数据进行修正,修正公式如下:

同理,利用B-F的测量误差对B-S的测量数据进行修正,利用C-F的测量误差对C-S测量数据进行修正……从而大大提高了修正后的测距精度。究其原因在于,待测目标与锚点F的距离很近,它到各个测距基站(锚点A、B、C等)的传播环境与锚点F到各个测距基站的传播环境相同,因而其相对系统误差类似。
3 试验结果
超宽带技术[3]由于具有很宽的带宽、很窄的时间脉冲,具有极好的时间分辨率,是近距离、高精度无线测距定位的首选技术。利用超宽带进行测距定位,人们进行了大量研究[4-6]。利用DW1000FOLLOWER(带宽为500 MHz,中心频率为4 GHz)超宽带测距系统,在开阔地带进行测距试验,得到一组测距数据,发现存在明显的测距系统误差。同时发现,不同的基站对于目标进行测距,其相对系统误差基本相同,因此提出了利用已知位置的锚点测距误差,修正对未知目标测距误差的方法。实验场景如图4所示。

图4 超宽带测距定位系统试验场景
三个基站分别位于直角坐标系中的(0,3)、(5,0)和(0,0)的位置,坐标单位为m。待测目标放置于位置1(5,5)和位置2(4.5,5),利用三个基站分别对位置1和位置2的目标站进行测距。其中,位置1假设为已知坐标的锚点。位置2为待测目标,利用各个基站对位置1的锚点测距误差,修正各基站对待测目标(位置2)的测距误差。
测量的相关数据如下,其中绝对误差为距离真实值减去测量值的平均值。
(1)基站1对位置1锚点的测距绝对误差为-90.030 2 mm,相对误差为-1.67%;
(2)基站2对位置1锚点的测距绝对误差为71.168 5 mm,相对误差为1.32%;
(3)基站3对位置1锚点的测距绝对误差为-94.253 7 mm,相对误差为1.33%;
(4)基站1对位置2目标的测距绝对误差为-123.800 7 mm,相对误差为-2.51%;
(5)基站2对位置2目标的测距绝对误差为61.160 8 mm,相对误差为1.17%;
(6)基站3对位置2目标的测距绝对误差为-117.273 6 mm,相对误差为-1.74%。
从以上数据可以看出,基站1、基站2、基站3对位置1的锚点和位置2的待测目标测量的相对误差相近。
依照式(15)的方法修正基站1、基站2、基站3对待测目标的测距数据,得到的处理结果如 图5、图6、图7所示。
图中,r1、r2、r3分别为基站1、基站2、基站3 对待测目标实际测得的距离数值。
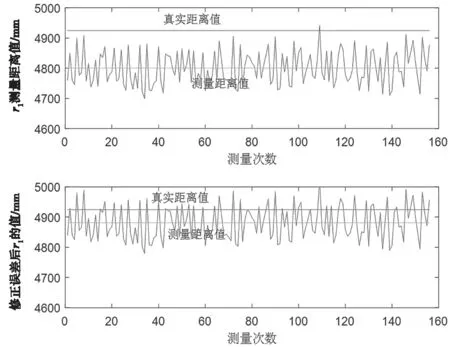
图5 基站1对目标测距数据修正前后的对比
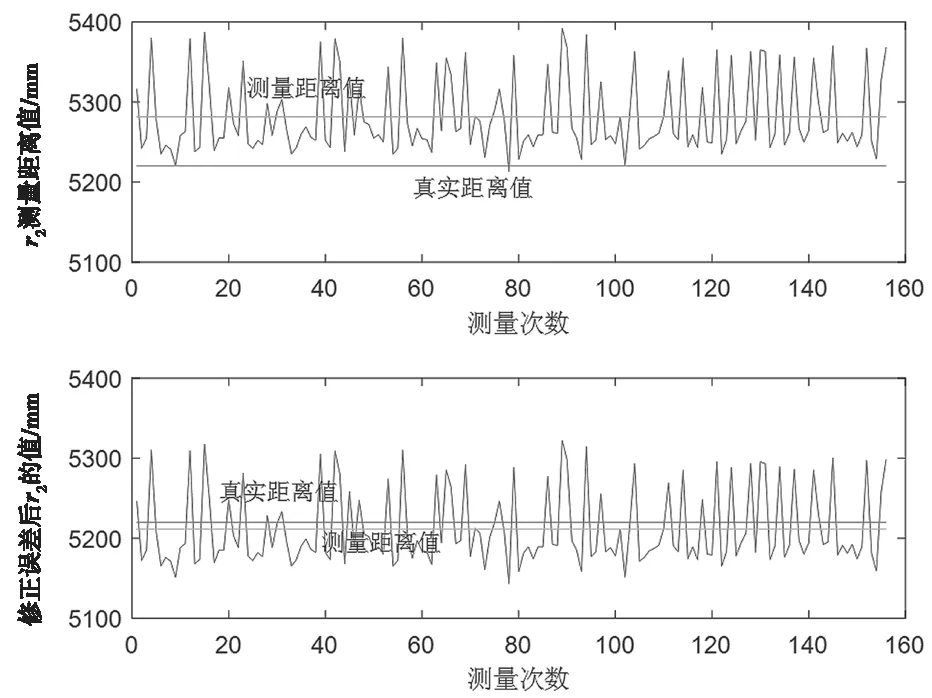
图6 基站2对待测目标测距数据修正前后的对比

图7 基站3对目标测距数据修正前后的对比
经误差修正后,基站1、基站2、基站3对待测目标的测量误差如下:
(1)基站1对待测目标的测量绝对误差为43.542 9 mm,减少误差64.8%;
(2)基站2对待测目标的测量绝对误差为 8.635 2 mm,减少误差85.6%;
(3)基站3对待测目标的测量绝对误差为29.171 8 mm,减少误差75.1%。
从图5、图6、图7和处理的数据来看,本文方法可以大大减少系统误差,从而大大提高测距精度。
4 结 语
本文提出的方法可以将测距的系统误差减小一半以上,从而大大提高了测距定位精度。本方法不限于具体的测距定位方案,无论是基于TOA的测距技术,还是基于TDOA的测距技术。其他的提高测距定位精度的方法,如扩大系统的带宽、消除系统的时钟漂移、提升同步时间精度等,均可以用本文的方法来减少或消除测量的系统误差。本文提出的方法有一个应用限定,就是要在待测区域布置一定数量的已知位置的锚点,而这一应用要求,对于仓储系统、近距离无线传感器网络是能够满足的。
