动力电池管理系统的设计与仿真研究
2019-03-05,,
,,
(许昌智能继电器股份有限公司,河南 许昌 461000)
0 引言
目前在新能源产业中电动汽车无法大面积推广的主要原因就是续航里程差并且针对不同的环境适应性差,这两个问题能否解决取决于电动汽车的电源系统和电源管理的优劣[1],电源管理系统是限制电动汽车前进的核心技术之一,电源管理技术的研发直接关系到电动汽车是否能称为汽车发展的前景产业。
现有的电源管理系统电池成组方式是一种固定模式,并且电池组的单体电池连接形式多为串联模式,不能随外界对电源需求的变化而切换电池成组方式[2];电动汽车在不同工况、不同的运行阶段,由于行驶速度不同,对电源的功率需求不同,即对电池组的电流和电压要求不同,电池组固定的串并联方式会造成单体电池过放,所以造成对不同工况的适用性差并且会对电池造成损害[3]。例如温家鹏目前针对动力电池供电问题采用电池更换模式的做法,但是采用的是软件设计调节,硬件部分仍然是被动地均衡,徐顺刚等[7-8]采用的方式仍然是没有在数据采集后能实现部分的电池供电控制问题,但是仍然会增加电池的能耗,更加容易加速电池的老化,缩短使用寿命。
针对上述问题采用了一种新的电池成组方式,即根据环境需求不同电池组在多种连接方式之间灵活的切换,同时也解决了电池组充电的不均衡性,并对这种具有此类成组方式的电池组进行电源管理系统[4]。本文设计了实现对锂电池在线控制和监视的电池管理系统,提出了一种实用于磷酸铁锂电池的等效电路模型,采用扩展卡尔曼滤波[5]的方法进行SOC估算,建立了Matlab数学仿真模型模拟单体电池在不同工况下的电压曲线,通过将一般电池成组和可切换电池成组方式的仿真对比验证了可灵活切换电池成组方式具有更强的供电动力,将仿真曲线与电池实际输出曲线对比,验证了电池成组技术的可靠性和SOC估算的准确性。
1 动力锂电池管理系统硬件设计
电动汽车电源管理是对充电过程和电动汽车行驶过程中电池组的监测,充电过程中对电流、电压、温度等数据采集,并进行剩余电量的估算,提醒使用者电池是否已充满[6];放电过程中对相关数据采集、电池剩余电量的估算,所有的数据通过上位机显示,方便用户查看。
1.1 系统功能框架
通过对功能分析和单片机C8051F040芯片的引脚使用明确了系统的外围电路。电源管理系统需要采集的模拟量有电流、电压、温度三个数据,状态识别需要通过按键电路作为控制芯片的输入;单片机输出有保护电路、充放电过程管理电路、电池成组电路等;控制器将采集的数据作为控制算法的输入,最终得出电池剩余电量的估算值;同时方便使用者直观的了解控制系统的实时运行状态,需要设置人机交互功能,即通过通讯电路实现单片机与上位机的联系,整体方案如图1所示。
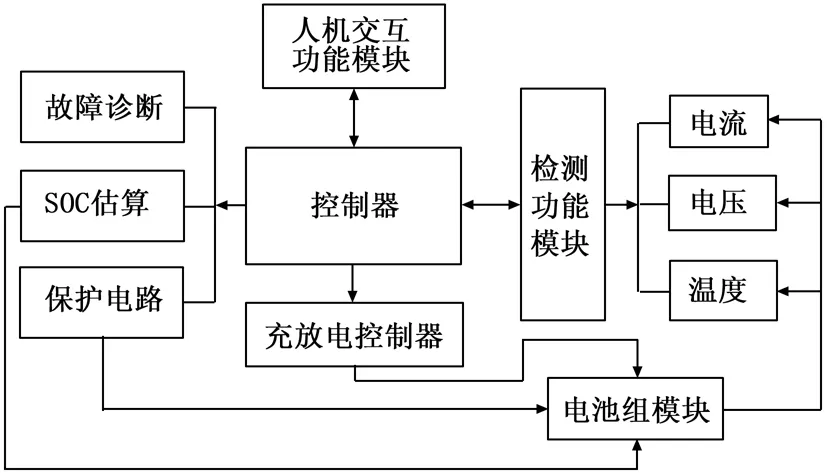
图1 电源管理系统功能需求框图
电池成组控制,为了适应电动汽车不同工况下对电源电压和电流的不同需求,电池组在几种不同成组方式之间灵活切换,避免电池组使用过程中过放,有利于增加电池组循环使用的次数。不同工作模式之间的切换可以通过开关电路实现,开关电路由单片机控制,首先核心控制芯片接受指令,判断电动汽车处于哪种运动状态,之后做出判断,控制对应的开关电路,将电池组切换到正确的模式下。
1.2 电压检测电路设计
基于精密电阻分压方式,此方案虽然实现成本低,但是分压会造成利用率低并且电池组中每一个单体电池都要对应一个AD检测端口,不实用于电池组串联多的电源管理系统,造成AD检测的浪费。
对于本系统,电压采集频率要求较低,所以适用于共享A/D轮流采集的方案。基于继电器和轮流采集的方式采集,原理如图2所示,其中B1-Bn为电池组中的单体电池,S1-Sn为光继电器,通过切换光继电器实现对不同单体电池两端电压检测。此方案克服了电阻分压法的AD检测口浪费的缺点,只需要两个AD检测端口,检测模式设置为差分模式,所有单体电池共享AD端口,单体电池电压范围在AD检测范围以内,不需要设置分压电阻,避免分压电阻带来的能量损失。Sa1-Sa4是切换正负极的继电器控制开关,所有继电器采用常开,不进行电压采集时,继电器处于断开状态,不会造成额外电量损失和单体电池之间的不均衡,保证了检测精度。
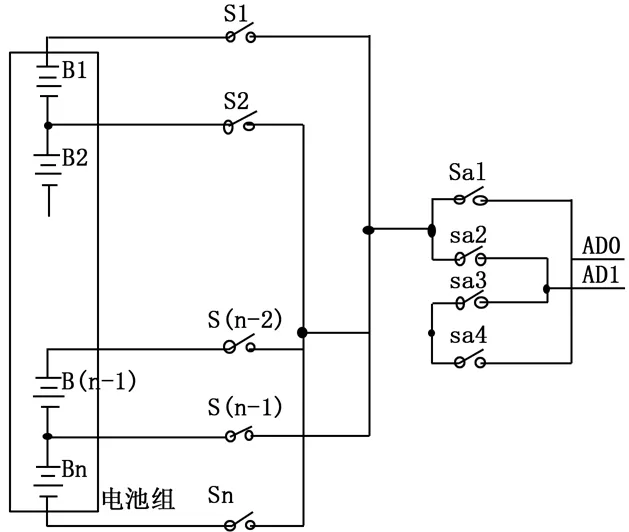

图2 基于继电器和共享A/D轮流采集方式
1.3 电流检测电路设计
本系统电池组工作模式有多种,串并联方式不固定,要想检测充放电电流,需要为每个单体电池配置一个霍尔传感器,检测对应单体电池充放电电流,选定的霍尔传感器的额定输出电压4 V,电源电压为±15 V。传感器将电流转换为电压,电压可以通过模/数转换直接被检测,采用片内集成的12位转换器ADC0,由于传感器输出电压超过了ADC0普通端口电压检测范围,所以需要在传感器和单片机之间加放大器。充电和放电通过传感器的电流方向相反,两个过程得到的电压值有正值也有负值,因为单端输入,检测电压范围是0~2.4 V,为了既能检测充电也能检测放电过程电流,需要将ADC0设置为差动模式。
选择四则运算芯片LM324,内部集成了4个独立和具有内部补偿功能的放大器。采用反向比例输入法,令R14=R12=20 K,R13=10 K,输出电压Vout与输入电压Vint的关系满足:Vout=Vint(-R13/R12),即放大倍数为1/2,通过放大器后电压范围为0~2 V,满足检测范围,原理如图3所示。
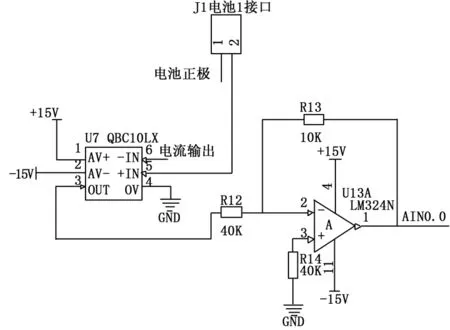
图3 电流采集电路原理图
2 电池成组技术的研究
本文提出一种适用于多种工况的可灵活切换电池成组方式的电源管理系统。首先,分析电动汽车在不同工况和运行速度过程中电机对电源电流、电压的要求,然后以此为依据,使得电池组在几种不同的成组方式之间灵活的切换,保证电池充放电电流、电压都在安全范围以内,增加了电池组的循环使用次数,同时也提高了管理系统的精度和效率[7]。
2.1 不同工况下对电源系统的需求分析
本文主要分析电动汽车在行驶过程中对电源电流、电压以及功率的要求,参照北京某纯电动公交汽车行驶过程中不同时间段电源总电流和总电压的变化,相关数据如表1所示;表2所示数据是电动汽车在不同的行驶状态下即加速、匀速、滑行、制动等过程中,电机对功率和速度的需求。
分析表中数据可知电动汽车行驶过程中电压和电流成反比,速度和功率、电流成正比。其中制动过程电流和功率为负值,说明此阶段是能量回收过程,制动过程类似于电池组充电过程。制动原理如图4所示,即将一部分机械能通过发电机/电动机转换为储蓄能,完成对电池组的充电
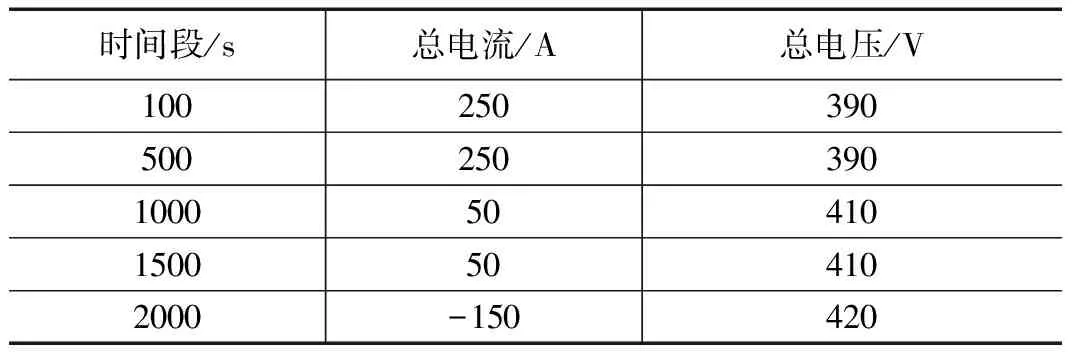
表1 不同时间段电流、电压分布

表2 不同速度段电流、功率分布
过程。而加速过程相对于其他行驶过程,电机对电源电流需求较大。

图4 制动过程
基于电动汽车行驶过程的分析,电动汽车行驶在不同的阶段对电源的需求不同,将电池组对应的分为三种工作模式[8]。模式一:制动和充电过程;模式二:均速行驶过程;模式三:加速行驶过程。根据每一种工作模式的实际需要,对应切换电池组成组模式。
2.2 电池成组电路设计
电池组充电方式分为两种,即串联或并联方式。在并联充电过程中,单体电池的端电压不停升高,其值U1高于电池的电动势E,他们之间的差值即为电池的内阻压降,充电时满足的关系式U1=E+△U1,放电时,端电压U2低于E,满足的关系式U2=E-△U2,对两节并联电池充电时,只有端电压差大于2△U时,才会出现其中一节单体电池对另外一节单体电池充电的现象,然而这种情况只会出现在某只电池出现短路时。所以在并联充电过程中不会出现其中一节单体电池对另外一节充电现象,更不会加剧并联电池组之间的不均衡性。本系统选择并联充电方式。
为了达到一定的电压和电流,电池组中存在串并联混合成组方式,现有的串并联成组方式有两种,方式一:先并联后串联,如图5所示;方式二:先串联后并联,如图6所示。
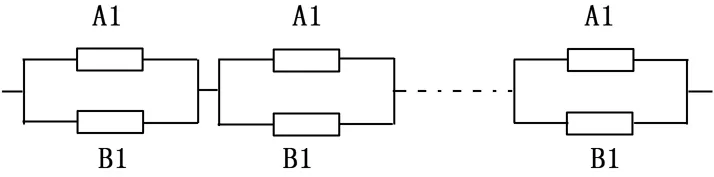
图5 先并后串联
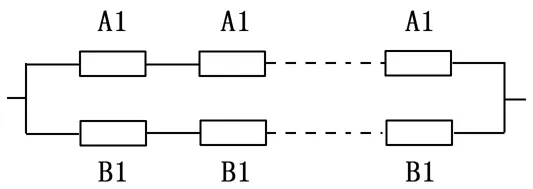
图6 先串后并联
分析对比这两种方式,方式一可靠性大于方式二的系统,电池组的可靠性大于单体电池的可靠性;对于方式二,当某个单体电池发生断路故障,则会导致整条支路都无法运行。通过分析对比本系统采用的电池成组技术方案如下:模式一,制动/充电,并联充电;模式二,匀速过程,电池组串联;模式三,加速过程,电池组先并联后串联。
电池组在三种工作模式之间的切换是通过单片机控制的开关电路实现的,具体切换电路如图7所示,所有的切换开关均为常开,减少系统的额外电量损耗。此方案可以实现多种电池成组方式的快速转换,电路设计简单,没有复杂元器件的使用,减少硬件电路的成本,并且切换电路的控制策略易实现。本系统中电池组的三种工作模式都是由图7通过控制策略切换而来。

图7 电池成组电路
模式一,制动/充电过程,该模式下电池组处于充电过程,具体实现方法:单片机控制K1、K4、K7…K3n-5闭合,K2、K5…K3n-4断开,K3、K6…K3n-3闭合。模式二,匀速行驶过程,匀速行驶过程中电池组处于放电过程,并且电机对电流要求相对不大,具体实现方法:单片机控制K1、K4、K7…K3n-5断开,K2、K5…K3n-4闭合,K3、K6…K3n-3断开。模式三,加速过程,加速行驶过程相对于匀速过程,电机对电流需求大,所以在电池组中,需要有并联形式的存在,增大输出电流,具体实现方法:单片机控制K1、K4闭合,K3、K6闭开,K2、K5断开,K7断开,K8闭合,K9断开,K10、K13闭合,K12、K15闭合,K11、K14断开,以此类推。
3 软件设计
软件采取自顶而下,模块化思路,采集部分是将检测到的数据处理,然后作为其他功能的输入[9]。本系统根据磷酸铁锂电池的外特征,搭建电池模型,并在其基础上应用扩展卡尔曼滤波的SOC算法。为了将电池参数直观的呈现出来,加入了人机交互功能。
3.1 软件系统总体设计
按照系统需要制定的控制策略如图8所示。其中电池成组模块根据电动汽车运动状态和当前速度判断电池工作模式是否与系统设定的一致,如果不一致,需要控制特定的继电器动作,使电池组处于正确的串并联模式;故障诊断和记录模块,软件系统列举了可能出现的故障,进行故障分类,即过流、高压、欠压、高温、低温,每一类故障对应硬件电路一个指示灯,当系统出现故障时,首先接通故障蜂鸣器,然后定位故障类型,将相应类型故障指示灯点亮,最后定位到具体单体电池,以文字标签的形式显示,此模块自动记录所有出现过的故障,方便维护查看。充放电控制模块主要是控制与外界连接的负载电路与充电机。

图8 系统软件模块
3.2 电量检测算法设计
在动态系统中由于本文建立的的电池模型是一个三阶的等效RC模型如图9,由于模型的高阶特点会产生的高斯白噪声,且电池在三种模式切换时会产生激励噪声[10],且在继电器切换过程中会产生震荡对检测到的数据造成极大的误差,由于汽车在运动过程中的振动对电池造成许多非平稳且随机的干扰。考虑到目前的嵌入式的可实现性和目前的电池检测滤波算法,扩展卡尔曼滤波算法是可以随着电池电量的变化进行实时的滤除掉随机噪声,扩展卡尔曼滤波作为一种比较成熟的滤波方法比较广泛的应用到计算机系统中,随着嵌入式技术的发展,扩展卡尔曼作为一种有效的估算方法越来越广泛的应用到嵌入式系统中。
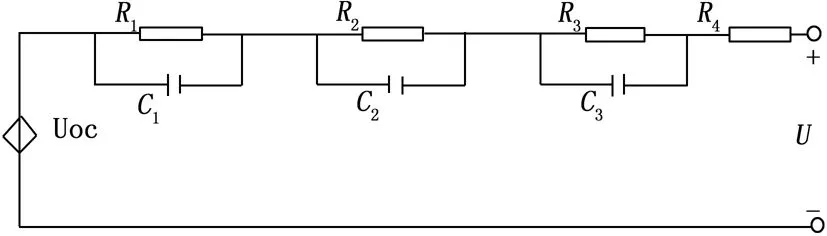
图9 电池模型图
用状态方程式(1)和测量方程(2)中确定电池的状态空间模型,其中的方程系数在上述三阶的等效RC模型中确定的A(k-1),B(k-1)和H(K-1)的方程系数如下所示。
X(k)=A(k-1)X(k-1)+B(k-1)U(k)+w(k)
(1)
Z(k)=H(k-1)X(k-1) +v(k)
(2)
(3)
(4)
(5)
其中:C(Ik,T,K)是在不同放电倍率和不同温度下的电池容量。f(s)是关于SOC和开路电压的关联函数,U(k)为现在状态的控制量,且假设状态中的w(k)和测量中的v(k)均为高斯白噪声,且为互相不干涉的噪声。
应用卡尔曼滤波对于系统的预测公式,基于系统的过程模型[11],由上一个状况而计算出现在的状况,再结合现在的状况我们可以得到现在的最优化估算值。然后根据下列递推循环式来得到最优的SOC估算的推导过程如下:
1)状态变量估计U(k):
U(k)=A(k-1)X(k-1)+B(k-1)Δt+w(k)
(6)
2)观测量估计V(k):
V(k)=H(k-1)U(k)+v(k)
(7)
3)均方估计误差预测估计P(k):
P(k)=A(k-1)P(k-1)AT(k-1)+QW
(8)
4)卡尔曼滤波增益Kg(k):
Kg(k)=kg(k-1)HT(k-1)[H(k-1)P(k)+QV]
(9)
5)状态最优估计X(k-1):
X(k-1)=U(k-1)+Kg(k)[V(k)-X(k-1)]
(10)
6)均方误差最优估计P(k):
P(k)=[1-Kg(k)H(k-1)]P(k-1)
(11)
其中:U(K-1)表示U的初试预计值,U(K)是通过上一个状态的预测,X(k-1)是上一个过程的最佳预测,QW表示状态噪声的协方差,QV表示测量噪声的协方差,V(k)是端电压预计值。
利用充电机对电池进行恒流转恒压充电,截止电压设为3.6 V,搁置一段时间,此时电池的SOC值为1。然后进行放电试验,以0.5 C的放电速度接通电阻300 s,静置3600 s,通过上位机的显示记录下最后一秒的开路电压,之后继续以0.5 C的速率放电300 s,静置3600 s,记录下最后一秒的开路电压,不断循环这个过程直到电池电压为2.2 V,结束测试。可根据每次记录的开路电压值计算出所对应的SOC值,因此获得OCV-SOC关系曲线,如图10所示,且其和理论相吻合。根据图10所示得出f(s,t)的函数关系式,是关于OCV和SOC的函数。
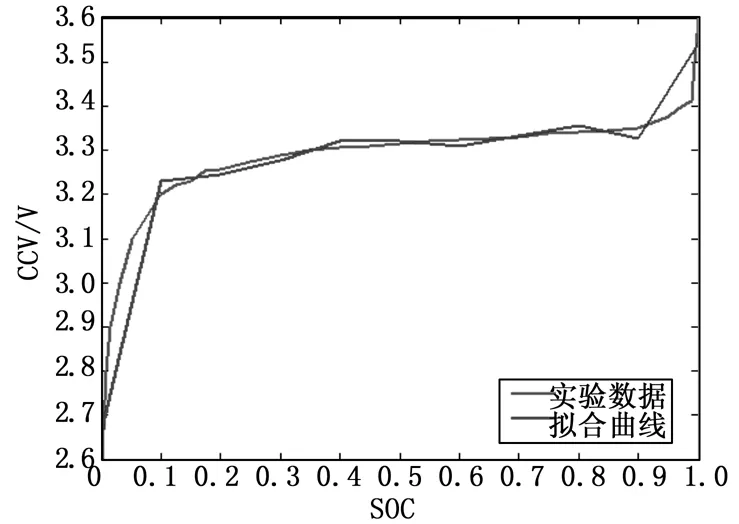
图10 OCV-SOC关系曲线
3.3 人机交互设计
为了方便上位机的界面的操作和信息的显示,本系统上位机设置启动界面、操作界面、电池参数实时显示界面、电压参数记录界面等多个历史界面。启动界面是系统上电后的显示的界面,操作界面是电源管理系统在自动运行过程中的执行一些必要操作的界面,电池参数实时显示界面是实时显示系统运行过程单体电池和电池组的电流、温度、电压和SOC,历史显示界面是一段时间内各参数随时间变化的曲线。
系统上电启动后,上位机自动进入启动界面,点击界面任意位置会进入自动操作界面。操作界面如图11所示,界面的下方设置有进入其他界面的按钮,方便不同界面的切换;右侧设置了手/自动切换按钮和自动模式下的启动、停止按钮;当标签呈现绿色时说明系统处于当前状态,否则显示红色,电池组当前电压显示表反应了电池组的工作模式;界面内还设置了速度输入旋钮,控制器会根据速度值自动定位电池组的工作模式。
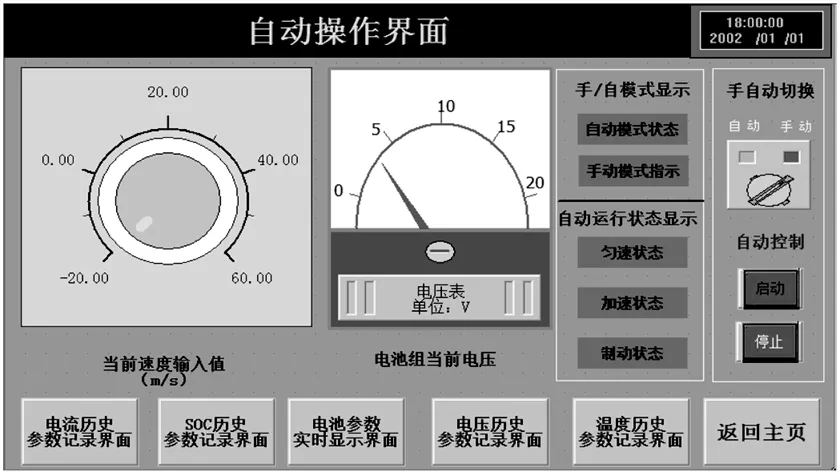
图11 自动操作界面
4 实验仿真及分析
4.1 实验仿真结果
为了验证系统电池成组控制技术和SOC估算的正确性,应用Simulink模拟了一种包含多种速度状态即加速、匀速、减速、制动的工况曲线如图12。将工况曲线作为模型输入,以设计的单片机电源管理系统作为平台[12],得到的SOC估算曲线如图14,电压仿真如图13,由上图可以得出SOC估算误差和电压挂算精度都可以控制在5%以内,由上述可知仿真得到的电压曲线与实验得到的曲线误差在5%以内处于可接受范围内。

图12 模拟工况曲线

图13 模拟工况下SOC仿真曲线

图14 普通电池成组和新型电池成组对比
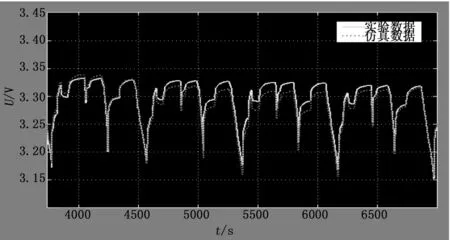
图15 不同工况下电池电压仿真曲线与实际输出电压曲线
4.2 数据分析
通过分析不同的工况把电流信号分为三段作为输入信号,来模拟电池组在不同工作状态下的需求,并通过卡尔曼滤波等技术测出电池组的电压等均衡状态,通过图12可以看出来把三种电池状态,匀速模式一,制动/充电,并联充电;模式二,匀速过程,电池组串联;模式三,加速过程,电池组先并联后串联。
把图12作为输入时通过测量普通并联电池和可切换状态电池输出的过程,可以看出来新型切换状态能适应更多的状况,在加速过程中新型成组方式可以提供更大的电压即功率输出提高8%左右,因此使电池具有更强的动力特性。
通过图13可以观测出,仿真出来的图和通过测量出来的数据趋势基本相符,整体测量出来的实验数据略高于仿真值,原因在于实际电池的功耗会有小幅度的提升,可以控制在百分之五之内。模拟工况图14的结果可以看出,伴随着加速减速等过程SOC估算会有波动,但是整体的线性度基本符合电池成组的测量规律。
5 结束语
针对基于单片机的动力锂电池管理系统的设计中,在采集模块、扩展卡尔曼滤波算法和电池成组电路的共同作
用下,在matlab仿真本系统设计时,改进后的成组电路会有更强的适应性且SOC估算精度和电压精度都得到的提高,趋于稳定并符合实际实验测量的数据,验证了SOC准确的估算和系统根据工况的不同自动切换电池成组方式的可靠性。
