基于车载激光雷达技术的高速铁路无砟轨道设施调查方法
2019-03-04
(中国铁路武汉局集团有限公司 武汉高铁工务段,湖北 武汉 430071)
截至2016年,我国铁路营业里程达12万km,资产总规模达7.25万亿元,其中高速铁路里程超过2万km[1]。高速铁路规模庞大的资产管理成为一项重要工作。铁路管理部门对铁路设施的管理提出了信息化和精细化的要求。由于已经投入运行的高速铁路的设施档案不完整以及缺乏电子化的数据,需要重新对高速铁路的设施单元进行现场采集。
目前,高速铁路设施单元现场调查主要采用人工方式。该方式面临着以下困难:首先,运营中的高速铁路维修天窗时间短,有效调查作业时间有限;其次,人工调查作业效率极为低下,作业人员管理培训工作繁琐且数据质量难以保证。因此,对运营中的大量高速铁路轨道设施实施人工调查是项难以完成的庞大工程,亟待研究和探索新技术新方法。
近些年兴起的车载激光雷达成像技术利用高速激光雷达获取现场三维场景,可以快速获取高速铁路轨道的精密三维点云数据。点云数据不仅包含了轨道各个设施单元的空间几何数据,还包含了各个设施的表面反射率数据。通过对轨道三维点云数据的滤波、分类与建模,可以提取轨道各设施单元的属性和几何参数。因此,车载激光雷达技术可以应用于高速铁路无砟轨道设施调查,采集的精密三维点云数据还可以应用于轨道的精细化检测和维护[2-7]。
自2017年初开始,武汉铁路局运用车载激光雷达技术在局内管辖的无砟轨道进行轨道各设施单元的调查。实践证明,该方法每1h可以采集5km的轨道点云数据,是传统人工调查效率的20倍以上,几何测量精度达到毫米级,大幅提高了既有线高速铁路轨道基础数据的采集效率。本文介绍车载激光雷达的原理,阐述了其在无砟轨道设施调查方面的应用情况。
1 车载激光雷达概述
近年来,车载激光雷达技术得到了快速的发展,并在测绘、数字城市、导航地图生产、矿山测绘以及公路勘察等领域得到普及应用。车载激光雷达主要由POS系统(定位定姿系统,包括GNSS,IMU,DMI模块)、激光扫描仪(LiDAR)、线结构激光传感器等组成。为满足高速铁路的测量与设施调查需求,还配置了轨道小车、供电电源、存储与控制计算机等设备,系统组成如图1所示。
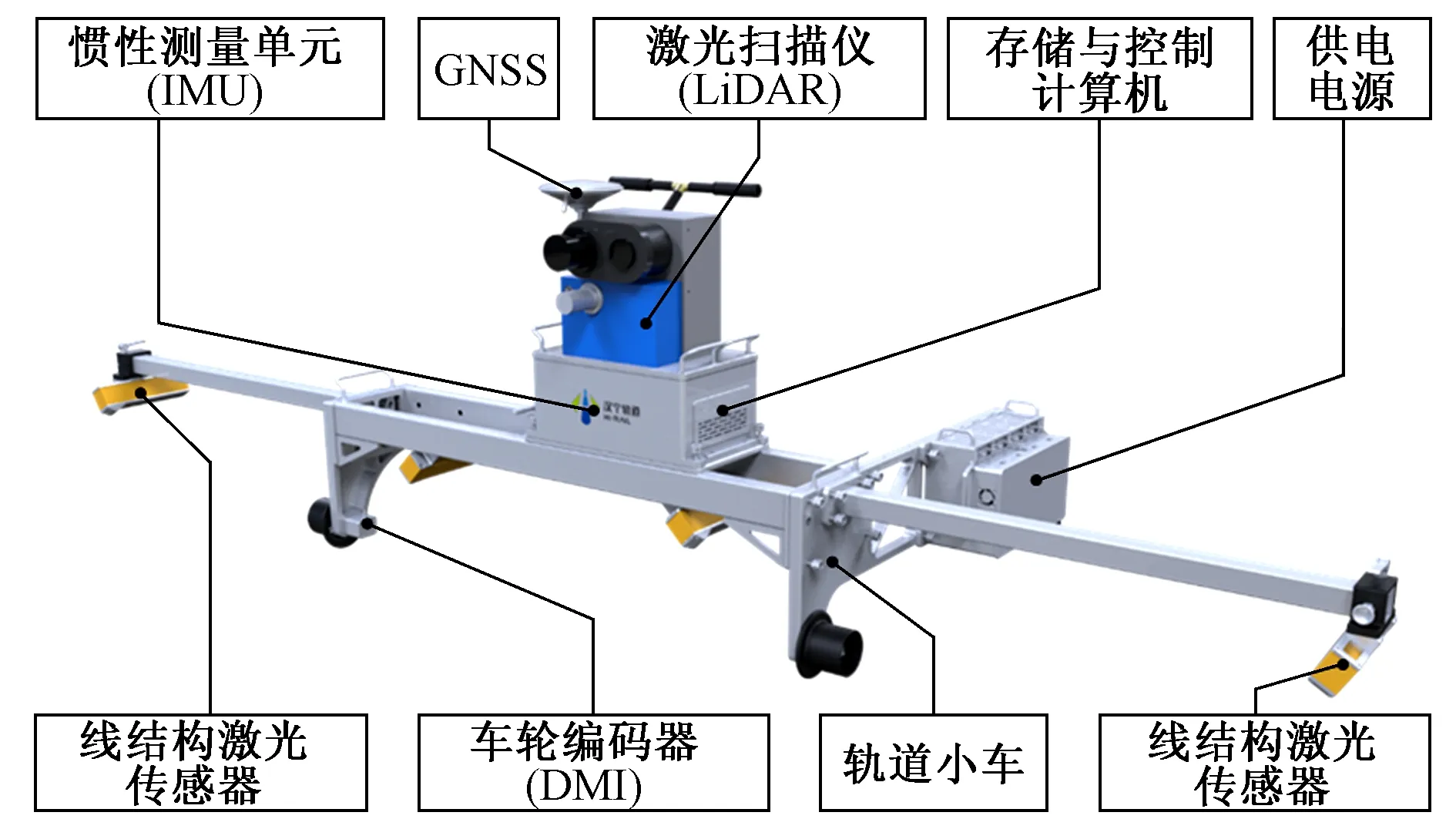
图1 车载激光雷达系统硬件组成

车载激光雷达的工作原理如图2所示。对于动态定位数据、姿态数据以及里程数据,首先利用扩展卡尔曼滤波器将三者进行融合,输入动态环境下车载平台的高精度位置与姿态(POS)数据;然后将POS数据与激光扫描仪的数据进行融合,获得铁路沿线地物目标的空间三维坐标。如图2所示。

图2 车载激光雷达的工作原理
2 车载激光雷达在无砟轨道设施调查中的应用方法
依据《高铁无砟轨道线路设备管理单元及统计办法》规定,按照划分的CRTSⅠ型、CRTSⅡ型、CRTSⅢ型板式、双块式无砟道床,岔区埋入式、岔区板式无砟轨道等设备管理单元进行调查,并输出10种数据成果表:正线无砟轨道表、正线无砟扣件表、正线侧向挡块表、端刺端梁表、岔区无砟轨道表、岔区无砟扣件表、岔区无砟侧向挡块表、站段岔特线无砟轨道表、站段岔特线无砟扣件表、站段岔特线侧向挡块表等。根据车载激光雷达数据特点,可以通过对点云数据处理提取各表所需信息。
2.1 无砟轨道高精度点云数据采集与处理流程
基于车载激光雷达的无砟轨道设施调查主要包括2个方面的工作,分别为外业数据采集以及内业数据处理2个过程,其整体业务流程如图3所示。外业数据采集主要是利用车载激光雷达现场采集高速铁路线路点云数据;内业数据处理主要包括高速铁路轨道点云数据解算以及轨道板信息提取2个方面。
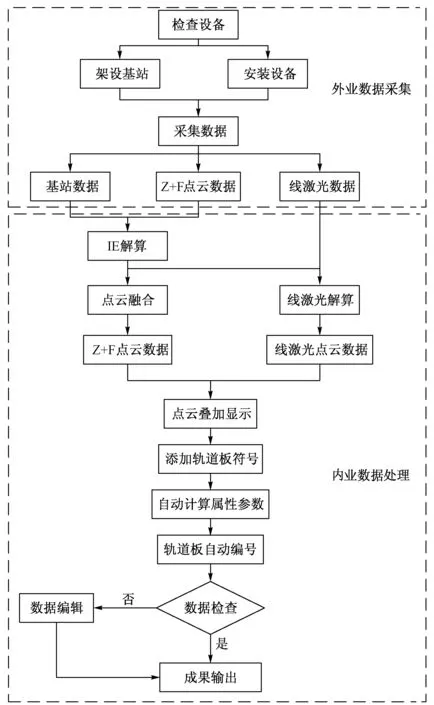
图3 无砟轨道设施调查方法的业务流程
2.2 高速铁路轨道点云数据解算
高速铁路轨道点云数据解算过程主要包括车载激光雷达系统的位置与姿态(POS)数据解算以及POS数据与激光扫描数据融合生成点云数据。
POS数据解算主要采用IE后处理软件,用于融合处理GNSS基站采集的差分改正数据、车载GNSS定位数据、IMU输出的角速度与加速度数据以及DMI输出的里程与速度数据,得到车载激光雷达动态条件下高精度的位置、速度、姿态等信息。基于GNSS/IMU/DMI组合的定位定姿方法可以克服隧道、高楼、桥梁等复杂环境引起的GNSS卫星信号失锁或干扰,可以显著提高定位定姿的精度及可靠性。然后主要利用融合软件将解算出来的POS数据与激光扫描仪的测量数据融合成点云数据,该点云数据坐标基于绝对位置信息。
2.3 轨道板参数信息自动提取算法
利用车载激光雷达采用的激光扫描所特有的数据特点,设计开发了一套轨道板参数自动提取算法。该算法输入数据包括:编码器数据、POS数据、轨道板坐标信息、轨道点云数据等。输出数据包括:轨道板填充层厚度、底层设备厚度、填充层长度、底层设备长度、接缝宽度、板长、起始里程、终止里程、板型相关信息。算法流程如图4所示。

图4 轨道板参数自动提取算法流程
上述算法计算完毕后,得到每个轨道板的底层设备厚度、填充层厚度、板块接缝起始里程、板块接缝终止里程4个参数,同时可以计算出车载激光雷达运行方向与内业数据处理方向是否一致的信息。
通过上述参数可计算出板长(非桥上双块式的板长为定值,无需计算)、接缝(桥上双块式接缝手工量测,无需计算)、填充层长度(双块式无填充层)、底层设备长度、板块起始里程、板块终止里程6个参数。
算法步骤如下:
1)当车载激光雷达运行方向与内业数据处理方向一致时:①轨道板的起始里程=前一个轨道板的接缝终止里程。②轨道板的终止里程=当前轨道板的接缝终止里程。③对于CRTSⅠ型、CRTSⅡ型、CRTSⅢ型轨道板,距离阈值=当前轨道板的接缝终止里程-前一个轨道板的接缝终止里程-35 mm(接缝阈值),计算距离阈值与各种板型的标准长度的差值,轨道板长度=差值最小的板型的标准长度;轨道板接缝值=当前轨道板的接缝终止里程-前一个轨道板的接缝终止里程-当前轨道板长度。④对于非桥上双块式板型,轨道板接缝由手动量测,无需计算,其轨道板长度=当前轨道板的接缝终止里程-前一个轨道板的接缝终止里程-轨道板接缝值。
2)当车载激光雷达运行方向与内业数据处理方向不一致时:①轨道板的起始里程=当前轨道板的接缝起始里程。②轨道板的终止里程=下一个轨道板的接缝起始里程。③对于CRTSⅠ型、CRTSⅡ型、CRTSⅢ 型轨道板,距离阈值=下一个轨道板的接缝起始里程-当前轨道板的接缝起始里程-35 mm(接缝阈值),计算距离阈值与各种板型的标准长度的差值,轨道板长度=差值最小的板型的标准长度;轨道板接缝值=下一个轨道板的接缝起始里程-当前轨道板的接缝起始里程-当前轨道板长度。④对于桥上双块式板型,轨道板接缝由手动量测,无需计算,其轨道板长度=下一个轨道板的接缝起始里程-当前轨道板的接缝起始里程-轨道板接缝值。
3)对于非桥上双块式轨道板,没有轨道板接缝,其轨道板长度为定值 6 500 mm。用户需要输入第1个轨道板的起始里程或者最后一个轨道板的终止里程。以此计算轨道板起始里程以及终止里程。
4)其他参数值获取:①轨道板底层设备长度=轨道板长度+轨道板接缝宽度;②轨道板填充层长度=轨道板长度+轨道板接缝宽度。
2.4 轨道板自动编号方法
高速铁路设备管理规定轨道板每一组为1个管理单元,其统计要求中需要有板顺序号,其编号规则为按照整公里数+“-”+序号(####-###)的格式依次编号,比如里程K1+000的第1块轨道板编号为0001-001。按传统调查方法对轨道板进行编号需要耗费很大的人力以及时间,因此该普查软件中提出一种轨道板自动编号的算法来对轨道板自动编号。该算法的前提条件是使用该软件的轨道板参数信息自动提取算法计算出每个轨道板的起始里程和终止里程,其流程见图5。
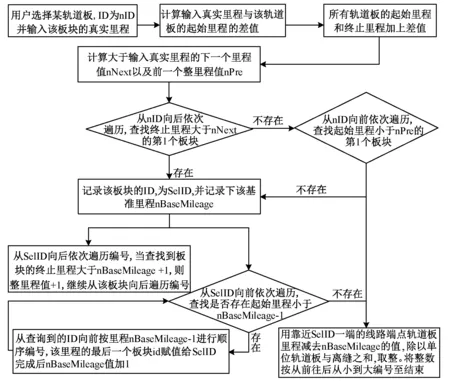
图5 轨道板自动编号算法流程
3 试验与分析
3.1 试验数据来源
为了能够验证车载激光雷达用于无砟轨道设施台账调查的可行性以及调查效率,采用rMMS车载激光雷达采集了武汉一高速铁路线路总共200 km左右的高精度点云数据,包含CRTSⅠ型、CRTSⅡ型和CRTSⅢ型板式无砟道床,双块式无砟道床、岔区埋入式以及岔区板式无砟轨道类型的数据。CRTSⅠ型、CRTSⅡ型板式以及双块式无砟轨道采集的点云数据如图6—图8所示。

图6 采集的CRTSⅠ型板点云
3.2 轨道设施单元提取与管理
内业数据处理过程采用的软件为自主研发的高速铁路无砟轨道线路设备普查软件,通过该软件从轨道点云数据中提取出轨道板的属性信息。
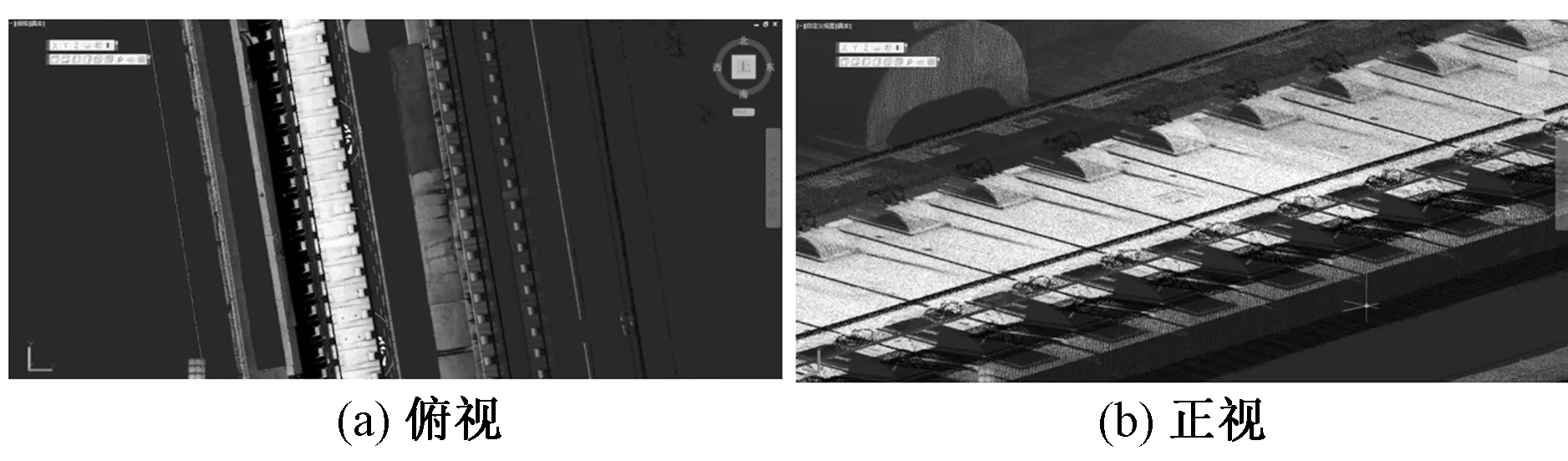
图7 采集的CRTSⅡ型板点云
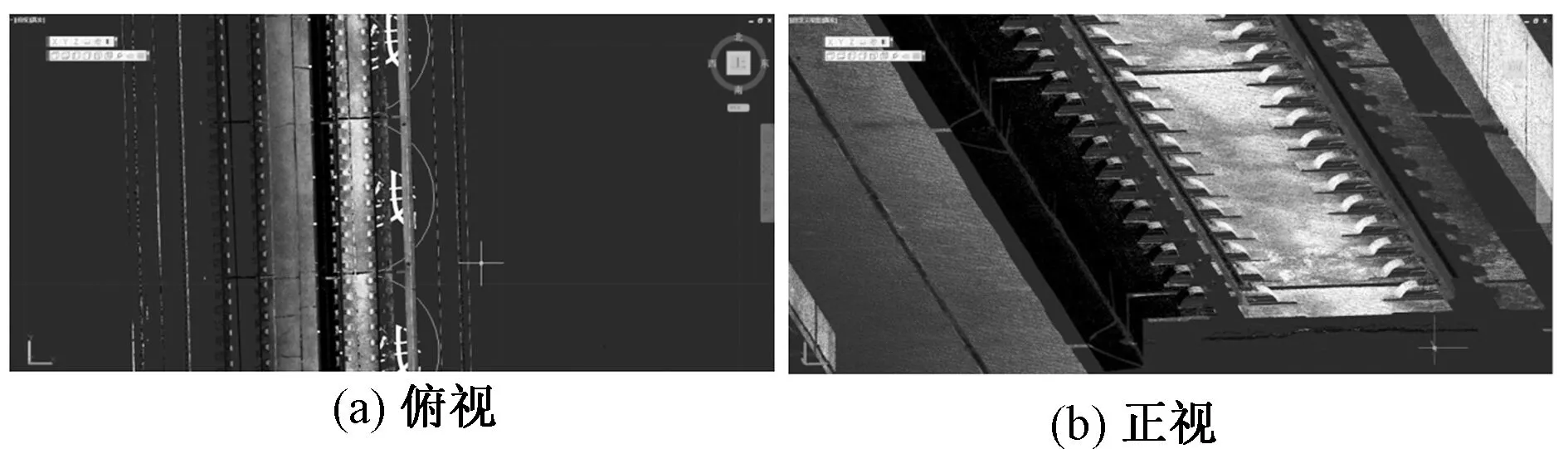
图8 采集的双块式无砟轨道点云
3.3 轨道设施调查数据分析
以轨道板数据为例介绍轨道设施调查成果。这部分的数据都以Excel表格形式提交,最终的成果数据如表1所示。
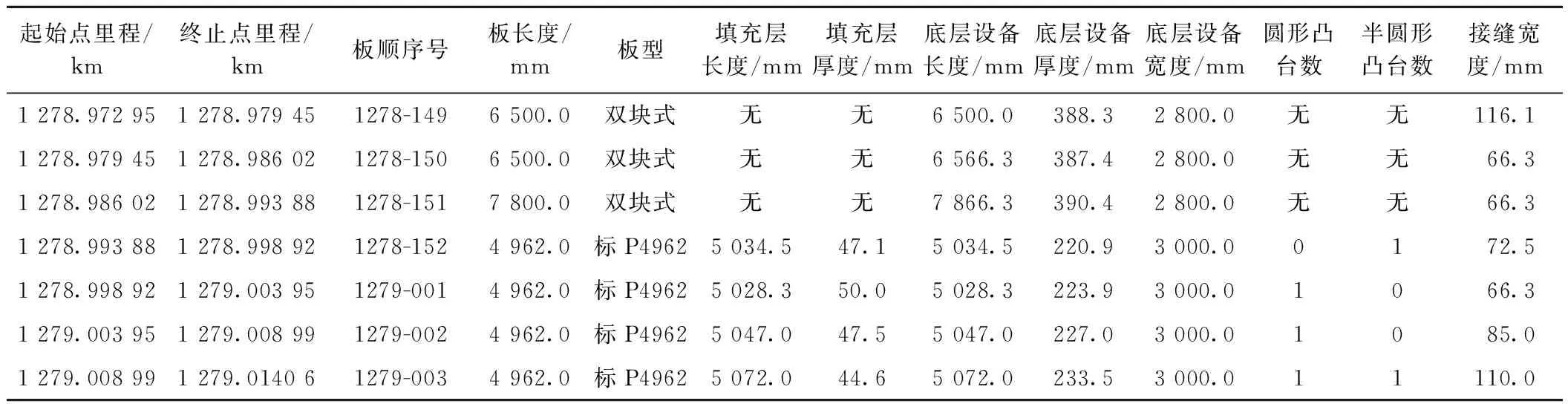
表1 轨道板数据示例
3.4 作业效率分析
由于桥上双块式轨道板与其他类型的轨道板处理方式不太相同,因此此次分别针对桥上双块式轨道板类型以及其他类型(CRTSⅠ型板、CRTSⅡ型板、CRTSⅢ型板和非桥上双块式轨道板)来进行效率分析。统计效率因子为每人处理每公里数据所需要的时间,见表2。
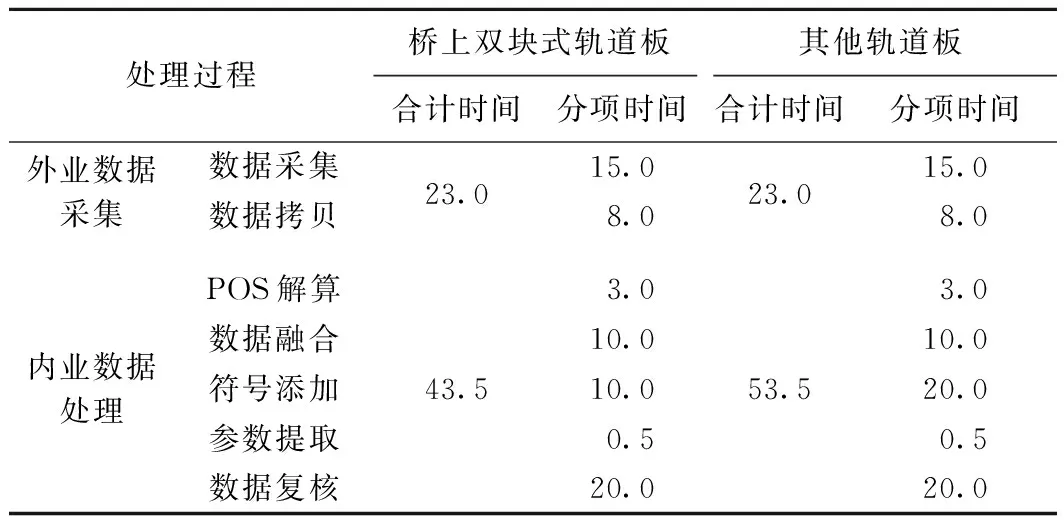
表2 轨道板调查所需时间 min
3.5 精度验证
利用轨道板参数信息自动提取算法提取轨道板的各种参数。轨道板长度、轨道板接缝参数、轨道板底层设备高度以及轨道板填充层高度的测量平均误差分别为0.10,-0.59,-0.97,1.60 mm;标准差分别为1.97,3.25,3.62,2.50 mm。
4 结语
车载激光雷达技术为高速铁路无砟轨道设施台账调查提供了一种有效方法,经过近200 km的高速铁路无砟轨道设施台账调查应用,验证了该技术的可行性。主要优势体现在:①基于车载激光雷达的高速铁路无砟轨道数据采集调查过程,相对于传统人工调查方式在效率上有了极大的提升;②该方法的应用可以大幅度降低人力成本;③成果数据质量和精度更为可靠;④可以自动输出符合高速铁路无砟轨道设施台账调查管理规范的成果;⑤历史数据可以保存,为历史数据对比提供了保障。
在应用过程中也发现了该方案存在的一些不足,主要是:车载激光雷达外业采集的点云数据过于庞大,目前采用的单机管理方式不能适应大规模高速铁路设施的调查与管理。后期可以考虑利用云存储等最新的方式来进行点云数据管理。
